1.本实用新型属于随动控制技术领域,具体地说,是涉及一种伺服转台系统。
背景技术:
2.云台类随动控制系统在军用和民用工业各个领域广泛应用,如天线、雷达、卫星通信及测控等。
技术实现要素:
3.本实用新型的目的在于提供一种伺服转台系统,能够按照控制指令实时实现二维同时转动,并可以向控制端反馈轴角,实现云台应用的全方位性。
4.本实用新型采用以下技术方案予以实现:
5.提出一种伺服转台系统,包括:基座,包括方位转台和俯仰转台;方位转台控制机构,包括方位编码器、方位限位、方位驱动器、方位电机和方位减速器;其中,方位驱动器驱动方位电机,方位电机通过方位减速器驱动方位转台;俯仰转台控制机构,包括俯仰编码器、俯仰限位、俯仰驱动器、俯仰电机和俯仰减速器;其中,俯仰驱动器驱动俯仰电机,俯仰电机通过俯仰减速器驱动俯仰转台;伺服转台控制器,包括伺服控制板和驱动控制板;伺服控制板通过io口向驱动控制板发送控制方位转台的方向和转速的第一信号,以及控制俯仰转台的方向和转速的第二信号;驱动控制板根据第一/第二信号驱动方位/俯仰驱动器;方位编码器和俯仰编码器连接驱动控制板,向驱动控制板反馈方位/俯仰转台的方位/俯仰编码信号;方位限位和俯仰限位连接驱动控制板,向驱动控制板反馈方位/俯仰转台的方位/俯仰限位信号;驱动控制板通过rs485串口向伺服控制板反馈方位/俯仰编码信号;其中,第一/第二信号包括方向电平信号和转速脉冲信号。
6.进一步的,所述驱动控制板包括:单片机和485通信电路;片选电路,连接单片机;单片机在开机后向片选电路发送第一片选信号选择第一通道,从第一通道向方位/俯仰驱动器发送初始化方位/俯仰转台的初始化信号;在初始化完成后,单片机向片选电路发送第二片选信号选择第二通道,从第二通道将伺服控制板发送的第一/第二信号转发至方位/俯仰驱动器,并采集方位/俯仰编码信号通过485通信电路反馈给伺服控制板。
7.进一步的,所述驱动控制板还包括:电限位电路,由三输入与非门和六反相器组成,用于在方位/俯仰限位被触碰后自动切断转速脉冲信号。
8.进一步的,所述驱动控制板还包括:数据片选芯片,用于选择方位编码信号和俯仰编码信号之一通过485通信电路反馈给伺服控制板。
9.进一步的,所述片选电路采用片选芯片。
10.与现有技术相比,本实用新型的优点和积极效果是:本实用新型提出的伺服转台系统,伺服控制板通过io口向驱动控制板发送控制方位/俯仰转台的方向及转速的信号,其中方向控制信号为电平信号,转速控制信号为脉冲电平信号,脉冲的频率决定转速,驱动控制板根据伺服控制板发送的信号控制方位/俯仰转台的方向和转速,并采集方位/俯仰编码
器的方位/编码信号,通过485串口向伺服控制板反馈方位/俯仰编码信号,也即向伺服控制板反馈了方位/俯仰转台的轴角信息,实现了一种能够实时按照控制指令实现二维同时转动,并可以向控制端反馈轴角的伺服转台系统。
11.结合附图阅读本实用新型实施方式的详细描述后,本实用新型的其他特点和优点将变得更加清楚。
附图说明
12.图1为本实用新型提出的伺服转台系统的系统结构图;
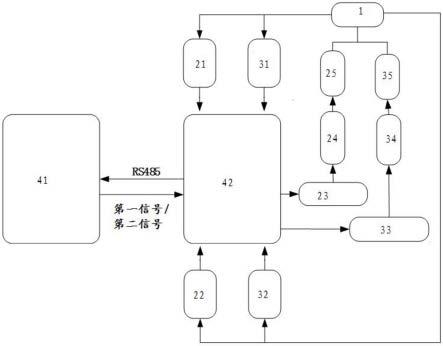
13.图2为本实用新型提出的伺服转台系统中驱动控制板的结构图;
14.图3为本实用新型提出的电限位电路的实施例图;
15.图4为本实用新型提出的伺服转台系统中基座的结构示意图;
16.图5为本实用新型提粗的伺服转台系统中驱动控制板的结构图。
具体实施方式
17.下面结合附图对本实用新型的具体实施方式作进一步详细的说明。
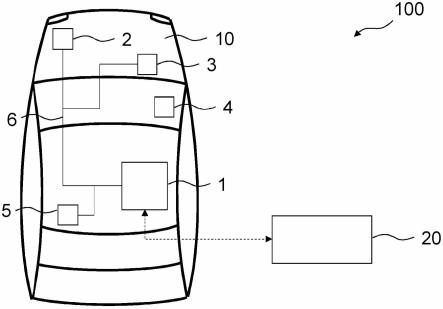
18.本实用新型提出的伺服转台系统,如图1和图4所示,包括基座1、方位转台控制机构、俯仰转台控制机构和伺服转台控制器。
19.基座1包括方位转台11和俯仰转台12。
20.方位转台控制机构包括方位编码器21、方位限位22、方位驱动器23、方位电机24和方位减速器25;其中,方位驱动器23驱动方位电机24,方位电机24通过方位减速器25驱动方位转台11。
21.俯仰转台控制机构包括俯仰编码器31、俯仰限位32、俯仰驱动器33、俯仰电机34和俯仰减速器35;其中,俯仰驱动器33驱动俯仰电机34,俯仰电机34通过俯仰减速器35驱动俯仰转台12。
22.伺服转台控制器包括伺服控制板41和驱动控制板42;伺服控制板41通过io口向驱动控制板42发送控制方位转台11的方向和转速的第一信号,以及控制俯仰转台12的方向和转速的第二信号;驱动控制板42根据第一/第二信号驱动方位/俯仰驱动器23和33;方位编码器21和俯仰编码器31连接驱动控制板42,向驱动控制板42反馈方位/俯仰转台11和12的方位/俯仰编码信号;方位限位22和俯仰限位32连接驱动控制板42,向驱动控制板42反馈方位/俯仰转台11和12的方位/俯仰限位信号;驱动控制板42通过rs485串口向伺服控制板41反馈方位/俯仰编码信号。
23.其中,第一信号包括控制方位转台11的方向电平信号和转速脉冲信号,第二信号包括控制俯仰转台12的方向电平信号和转速脉冲信号;转速脉冲信号的频率决定方位转台11和俯仰转台12的转速。
24.如图2所示,本实用新型实施例中,驱动控制板42包括单片机u1、485通信电路u2、片选电路u3;片选电路u2连接单片机u1;片选电路u1采用片选芯片实现,具有两个可选通道,单片机u1在开机后向片选电路u3发送第一片选信号选择第一通道,从第一通道向方位/俯仰驱动器23和33发送初始化方位/俯仰转台11和12的初始化信号;在初始化完成后,单片机u1向片选电路u3发送第二片选信号选择第二通道,从第二通道将伺服控制板41发送的第
一/第二信号转发至方位/俯仰驱动器23和33,并采集方位/俯仰编码信号,通过485通信电路u2反馈给伺服控制板41。
25.在本实用新型一些实施例中,驱动控制板42还包括电限位电路u4,如图3所示的实施例,该电限位电路u4由三输入与非门u41和六反相器u42组成,用于在方位/俯仰限位被触碰后自动切断转速脉冲信号。
26.具体的,以方位转台的电限位电路为例,az_dir_out表示:方位轴方向信号输出,当az_dir_out=h时,转台逆转;当az_dir_out=l时,转台顺转;az_cp_out表示:方位轴速度信号输出,转台通过信号的高低变化完成脉冲信号的输出,即每发出一个高低信号,转台转动一下;cw表示:方位轴顺转限位信号,低电平有效;ccw表示:方位轴逆转限位信号,低电平有效。az_dir表示:转台方向输出;az_pwm表示:转台速度输出。
27.当az_dir_out=h,az_cp_out=h,cw=h,ccw=h时,az_dir:低电平,转台逆转;az_pwm:高电平,发出一个高电平。
28.当az_dir_out=h,az_cp_out=l,cw=h,ccw=h时,az_dir):低电平,转台逆转;az_pwm:低电平,发出一个低电平。
29.当az_dir_out=l,az_cp_out=h,cw=h,ccw=h时,az_dir:高电平,转台顺转;az_pwm:高电平,发出一个高电平。
30.当az_dir_out=l,az_cp_out=l,cw=h,ccw=h时,az_dir:高电平,转台顺转;az_pwm:低电平,发出一个低电平;由此可见,当限位信号均为高电平时,转台可以顺转也可以逆转。
31.当az_dir_out=h,az_cp_out=h,cw=l,ccw=h时,az_dir:低电平,转台逆转;az_pwm:高电平,发出一个高电平。
32.当az_dir_out=h,az_cp_out=l,cw=l,ccw=h时,az_dir:低电平,转台逆转;az_pwm:低电平,发出一个低电平。
33.当az_dir_out=l,az_cp_out=h,cw=l,ccw=h时,az_dir:高电平,转台顺转;az_pwm:低电平,发出一个低电平。
34.当az_dir_out=l,az_cp_out=l,cw=l,ccw=h时,az_dir:高电平,转台逆转;az_pwm:低电平,发出一个低电平;由此可看出,当顺限信号为低电平时,只能逆转,不能顺转。
35.当az_dir_out=h,az_cp_out=h,cw=h,ccw=l时,az_dir:低电平,转台逆转;az_pwm:低电平,发出一个低电平。
36.当az_dir_out=h,az_cp_out=l,cw=h,ccw=l时,az_dir:低电平,转台逆转;az_pwm:低电平,发出一个低电平。
37.当az_dir_out=l,az_cp_out=h,cw=h,ccw=l时,az_dir:高电平,转台顺转;az_pwm:高电平,发出一个高电平。
38.当az_dir_out=l,az_cp_out=l,cw=h,ccw=l时,az_dir:高电平,转台逆转;az_pwm:低电平,发出一个低电平;由此可看出,当逆限信号为低电平时,只能顺转,不能逆转。
39.因此,只有当限位信号为高电平时,az_dir_out为高电平时,转台顺转,az_dir_out为低电平时,转台逆转;当一方限位信号为低电平时,转台限位,切断脉冲信号,转台只
能反向转动。
40.如图5所示,在本实用新型一些实施例中,驱动控制板42还包括数据片选芯片u5,用于选择方位编码信号和俯仰编码信号之一通过485通信电路u2反馈给伺服控制板41。
41.如图4所示,方位转台11和俯仰转台12采用a-z座架结构实现;方位(a轴)运动范围0-大于360
°
,俯仰(e轴)运动范围0-180
°
,其中,e轴90度指向天顶方向,0度指向水平。
42.上述,方位转台11和俯仰转台12的具体结构,基于上述技术内容和参数,本领域技术人员可以采用现有结构设计实现,本实用新型不予具体限定。
43.应该指出的是,上述说明并非是对本实用新型的限制,本实用新型也并不仅限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。