1.本发明总体上涉及医学成像,并且更具体地涉及用于确定脊柱围绕其纵轴相对于垂直轴的旋转角度的系统。
背景技术:
2.荧光透视机经常用于医院急诊室和创伤中心。这些机器具有支撑与x射线检测器间隔开的x射线源的臂。该臂通常为c形臂,用于相对于x射线检测来定位x射线源;并且可被操纵以将x射线源放置在患者的一侧上并且将x射线检测器放置在患者的另一侧上。一系列关节允许手动地将臂移动到将提供期望的x射线图像的姿态。监测器实时显示x射线图像。c形臂荧光透视机可以例如用于对将插入销或螺钉以将骨保持就位的位置进行成像。
3.c形臂荧光透视机的一个问题是其相对于患者的脊柱缺乏确定的基准角。换句话说,当外科医生假定脊柱被定向成与手术台处于期望对准时,患者以及由此其脊柱可以向任一侧旋转几度。这种旋转可导致椎弓根螺钉以相对于椎弓根不正确的角度插入,从而导致内侧或外侧穿透。
4.现有技术的另一缺点涉及使用机器人来引入用于椎弓根螺钉或用于插入椎弓根螺钉的孔口。机器人假定椎骨被定向成横突水平排列而棘突竖直定向。在这种情况下,脊柱沿着其纵轴并且相对于平分椎骨的理论竖直平面的旋转可以减小机器人可用来防止椎骨被椎弓根螺钉破坏的公差。
5.因此,本系统提供了一种检查脊柱围绕其纵轴的旋转关系的方法,所述方法克服了现有技术外科手术方法的缺点。本发明的脊柱定向系统不仅提供了准确性,而且还允许利用视觉和/或电磁传感器以及比较ct扫描和荧光透视扫描的视觉指示器来交叉检查定向。
技术实现要素:
6.简言之,本发明涉及一种系统和方法,所述系统和方法用于确认脊柱围绕并沿着脊柱的纵轴的取向,以在通过手或机器人进行椎弓根螺钉放置时为椎弓根螺钉放置提供准确性。所述系统利用患者的ct扫描,所述ct扫描与实时荧光透视图像叠合以确认正确的取向和位置。然后,可利用光学或电磁标记来在外科手术期间监测脊柱的移动。
7.因此,本发明的目的是提供一种用于确认脊柱围绕并沿着纵轴以进行脊柱手术的取向的系统。
8.本发明的另一个目的是提供一种利用ct扫描和实时荧光透视来确认脊柱取向的系统。
9.从以下结合附图的描述中,本发明的其它目的和优点将变得显而易见,其中通过说明和示例的方式阐述了本发明的某些实施方案。附图构成本说明书的一部分,包括本发明的示例性实施方案,并且示出了本发明的各种目标的和特征。
附图说明
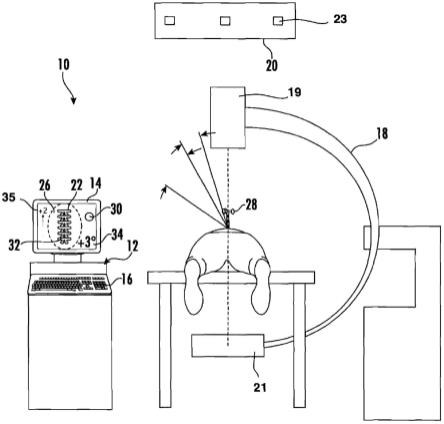
10.图1是示出本发明的脊柱定向系统的一个实施方案的示意图;
11.图2是示出腰椎的一部分的椎骨的局部后视图;
12.图3是椎骨的局部后视图,其示出胸椎的一部分;
13.图4是示出处于t3水平的胸椎的端视图;
14.图5是示出处于t1水平的胸椎的端视图;
15.图6是椎骨的侧视图,其示出椎弓根螺钉放置的头尾向成角;
16.图7是椎骨的侧视图,其示出放置在椎骨中的椎弓根螺钉;
17.图8是椎弓根的端视图,其示出椎弓根螺钉的外侧穿透;
18.图9是椎弓根的端视图,其示出椎弓根螺钉的内侧穿透;
19.图10是椎弓根的端视图,其示出椎弓根螺钉的准确放置;
20.图11示出为定位椎骨的矢状面而拍摄的荧光透视图像;并且
21.图12示出图11的荧光透视图像的相同区域的ct扫描图像。
具体实施方式
22.虽然本发明容许各种形式的实施方案,但是在附图中示出并且将在下文中描述目前优选的实施方案,应当理解,本公开内容应当被认为是本发明的范例,并且不旨在将本发明限制于所示出的具体实施方案。
23.总体上参照图1-11,示出用于确定脊柱围绕并沿着纵轴的旋转取向的脊柱定向系统10。该系统通常包括计算机12、监测器14、键盘16、c形臂18和光学或电磁监测系统20。计算机12包括处理器(未示出)和足够的存储器,用于包含并显示脊柱24的计算机断层摄影(ct)扫描图像22、磁共振(mri)图像等(图12)。c形臂18也连接到计算机12以输入荧光透视图像26;c形臂18包括定位在所述c形臂18的第一端处的x射线源19和定位在所述c形臂的第二端处的x射线检测器21。计算机存储器具有存储文件,该存储文件包括存储在其上的ct或mri图像,以便调用到监测器14上来查看。脊柱定向系统10优选地被构造和布置成将ct扫描图像22或mri扫描图像叠合在荧光透视图像26上。然而,在一个备选实施方案中,在不脱离本发明的范围的情况下,荧光透视图像26可以被叠合在ct扫描图像22或mri扫描图像上。以这种方式,ct图像22或mri图像可以被定向为使得矢状面或任何其它建立的平面是水平的或垂直的,以与荧光透视图像26进行比较。如果图像匹配,则光学传感器28可以附接到脊柱24的一部分,以允许光学监测系统20监测脊柱的移动。这种光学监测系统20在医学领域是公知的。在这种光学监测系统中,一个或多个光学传感器28在一个或多个光学监测相机23的观察框架内附接到诸如椎骨的骨,并且如果检测到移动则警示外科医生。一旦检测到移动,或者在叠合的ct图像22或mri图像与荧光透视图像26不匹配的情况下,将在监测器14上显示彩色指示符30或参考线32,以向外科医生指示脊柱相对于由矢状面或以其它方式建立的平面产生的垂直轴旋转或平移。在这种情况下,ct或mri图像,以及因此矢状面或以其它方式建立的平面,可围绕纵轴旋转或沿着脊柱平移,直到图像匹配。ct图像或mri图像相对于荧光透视图像26旋转的度数然后可作为旋转角度34被指示给医生。一旦确定了旋转角度34,外科医生就可使用旋转角度34来利用机器人(未示出)或通过手放置螺钉。同样,图像沿纵轴平移的距离可被表示为平移距离35,并用于椎弓根螺钉进入点的定位。
24.参照图2和图3,示出了椎弓根螺钉进入腰椎的进入点。进入点通常被定义为四条线中任何一条线的汇合点,例如椎弓峡部38、乳状突41、上关节面40的外侧界和中间横突44。
25.参照图3,椎弓根螺钉进入下胸段的进入点总体上通过小平面关节46的中间部分和横突48的上边缘确定。特定的进入点将优选地正好在交叉部的外侧和尾侧。
26.参照图4和图5,示出了中外侧倾斜。中外侧倾斜将取决于椎骨围绕脊柱的纵轴的旋转。主要目的是防止在插入深度处椎管的表面内侧穿透和椎体皮层的外侧或前部穿透。理想地,两个螺钉应当会聚但完全保持在椎弓根和身体的皮层内。如图所示,椎弓根54的横向角度52的成角范围为t1水平处的约30度到t3水平处的约15度,并且从t4向下,横向角度几乎是矢状的。
27.参照图6和图7,示出了头尾向成角56。适当的轨线是瞄准对侧横突的。图7示出椎弓根螺钉58的正确放置。
28.图8-10示出椎弓根螺钉58的各种布置。图8示出椎弓根螺钉58的外侧穿透。图9示出椎弓根螺钉58的内侧穿透。图10示出正确放置的椎弓根螺钉58。
29.参照图11和图12,示出荧光透视图像26和ct扫描图像22或mri扫描图像。这些图像虽然不是本发明所特有的,但代表了为脊柱外科手术所拍摄的图像类型。
30.应当理解,虽然示出了本发明的某些形式,但是本发明并不限于本文中描述和示出的特定形式或布置。对于本领域技术人员显而易见的是,在不脱离本发明的范围的情况下,可以进行各种改变,并且本发明不应被认为限于在说明书和这里所包括的任何附图/图中所示出和描述的内容。
31.本领域技术人员将容易地理解,本发明非常适于实现所提及的目的并获得所提及的目标和优点以及本发明所固有的那些目标和优点。本文所述的实施方案、方法、程序和技术目前代表优选的实施方案,它们是示例性的,并且不旨在作为对范围的限制。本领域技术人员将想到其中的变化和其它用途,这些变化和用途包括在本发明的精神内并且由所附权利要求的范围限定。尽管已经结合具体的优选实施方案描述了本发明,但是应当理解,要求保护的本发明不应当不适当地受限于这些具体实施方案。实际上,对本领域技术人员显而易见的对用于实施本发明的所述模式的各种修改均旨在落入所附权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。