1.本发明属于视力矫正外科手术技术领域,更具体地,涉及一种个性化屈光手术装置。
背景技术:
2.近视已经成为困扰人类的全球化问题。目前,通过眼镜或隐形眼镜是矫正视力最普遍的方法,但是其易折损、使用环境受到限制等弊端为近视患者生活上带了诸多不便,因此长效稳定矫正视力的屈光手术方式成为另一种具有吸引力的选择,其中用激光进行角膜屈光手术治疗得到了较广泛应用。
3.准分子激光原位角膜磨镶术(lasik)和飞秒激光小切口角膜微透镜取出术(smile)已成为21世纪的主流屈光手术。lasik屈光手术是先将角膜基质上部进行制瓣,然后利用准分子激光对角膜基质层激光消融,已达到矫正视力的目的。smile技术改变了通过激光消融矫正度数的方式,使用飞秒激光在角膜基质内部切削出小透镜的形貌,再将其取出。
4.无论是lasik还是smile都采用munnerlyn方程定义激光切削深度,munnerlyn方程基于角膜和加工轮廓都是球形的假设,诣在让部分角膜经过激光切削后角膜表面曲率得到矫正。由于眼内压(iop)的存在,角膜中央区域的厚度减小使得变形幅度大于周围,不仅导致术后高阶像差的增加,也降低了屈光手术效果。
5.由于每个人的角膜形貌与iop存在个体差异,因此每个角膜的屈光矫正过程都应采用个性化加工方式。现有技术中,通常优化切削模式来矫正视觉系统的高阶像差或减少术后高阶像差,来提高患者视觉质量。然而现有的个性化引导方式虽然矫正了高阶像差,但同时也改变了角膜的形貌,导致全眼低阶像差发生改变,cn 109491083 a提出了一种补偿高阶像差的方法,将zernike多项式的表示方法与低阶像差屈光度进行了换算,在不影响低阶像差的情况下对球差、慧差、二级散光进行了补偿,但是并没有考虑角膜的生物力学效应。
技术实现要素:
6.针对现有技术的缺陷和改进需求,本发明提供了一种个性化屈光手术装置,旨在能够根据患者角膜实际的生理情况进行个性化切削,在不改变患者低阶像差的基础上补偿其高阶像差,提高患者视觉质量。
7.为实现上述目的,本发明提供了一种个性化屈光手术装置,包括:
8.获取模块,用于获取患者角膜光学区各节点空间坐标;
9.处理模块,用于执行以下步骤:
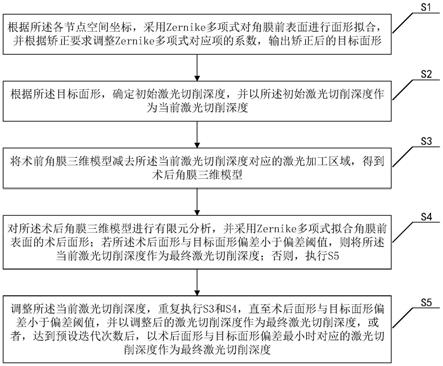
10.s1,根据所述各节点空间坐标,采用zernike多项式对角膜前表面进行面形拟合,并根据矫正要求调整zernike多项式对应项的系数,输出矫正后的目标面形;
11.s2,根据所述目标面形,确定初始激光切削深度,并以所述初始激光切削深度作为
当前激光切削深度;
12.s3,将术前角膜三维模型减去所述当前激光切削深度对应的激光加工区域,得到术后角膜三维模型;
13.s4,对所述术后角膜三维模型进行有限元分析,并采用zernike多项式拟合角膜前表面的术后面形;若所述术后面形与目标面形偏差小于偏差阈值,则将所述当前激光切削深度作为最终激光切削深度;否则,执行s5;
14.s5,调整所述当前激光切削深度,重复执行s3和s4,直至术后面形与目标面形偏差小于偏差阈值,并以调整后的激光切削深度作为最终激光切削深度,或者,达到预设迭代次数后,以术后面形与目标面形偏差最小时对应的激光切削深度作为最终激光切削深度。
15.进一步地,所述获取模块,还用于采集患者角膜形貌,以建立所述术前角膜三维模型,并以光轴方向为z轴,获取患者角膜光学区各节点空间坐标。
16.进一步地,所述s3中,对所述术后角膜三维模型进行有限元分析,并采用zernike多项式拟合角膜前表面的术后面形,包括:对所述术后角膜三维模型进行有限元分析,得到所述当前激光切削深度对应的受力变形数据;将所述受力变形数据转化为术后角膜各节点位移,以得到术后角膜各节点空间坐标,并采用zernike多项式拟合角膜前表面的术后面形。
17.进一步地,通过以下方式计算术后面形与目标面形偏差rms:
[0018][0019]
其中,zj为术后角膜第j个节点到目标面形的距离,为术后角膜各节点到目标面形的平均距离,m为拟合角膜前表面所需的节点总数。
[0020]
进一步地,所述s5中,调整所述当前激光切削深度,包括:通过在s4中zernike多项式对应项加入迭代系数δα,调整所述当前激光切削深度;其中,δα=(ai δd)-qi,(ai δd)为目标面形对应zernike多项式对应项的系数,qi为术后面形对应zernike多项式对应项的系数。
[0021]
进一步地,所述s4中,对所述术后角膜三维模型进行有限元分析,包括:采用comsol固体力学模块对术后角膜三维模型进行有限元分析。
[0022]
进一步地,所述s4中,对所述术后角膜三维模型进行有限元分析,包括:采用2阶ogden超弹性方程对术后角膜三维模型进行有限元分析。
[0023]
进一步地,所述s1中,矫正要求包括矫正屈光度或指定像差。
[0024]
进一步地,所述光学区直径取4~10mm。
[0025]
总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
[0026]
本发明首先根据患者角膜光学区各节点空间坐标,采用zernike多项式对角膜前表面进行面形拟合,并根据矫正要求调整zernike多项式对应项的系数,输出矫正后的目标面形;根据目标面形,确定初始激光切削深度,并作为当前激光切削深度;将术前角膜三维模型减去当前激光切削深度对应的激光加工区域,得到术后角膜三维模型;对所述术后角膜三维模型进行有限元分析,并采用zernike多项式拟合角膜前表面的术后面形;通过比较术后面形与目标面形的偏差大小,确定最终激光切削深度。如此,本发明通过将角膜生物力
学性能的影响与加工参数进行耦合,能够更真实的模拟角膜的屈光手术过程,术后像差小、视觉质量高;且模型易收敛、求解效率高,操作方便,适用性较高。
附图说明
[0027]
图1为本发明提供的个性化屈光手术装置中处理模块的具体执行步骤流程示意图;
[0028]
图2为本发明提供的确定初始激光切削深度的流程示意图;
[0029]
图3为本发明提供的个性化屈光手术系统的架构图。
具体实施方式
[0030]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0031]
在本发明中,本发明及附图中的术语“第一”、“第二”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
[0032]
本发明提供了一种个性化屈光手术装置,包括:获取模块和处理模块。
[0033]
获取模块,用于获取患者角膜光学区各节点空间坐标。
[0034]
具体的,采集患者角膜形貌,以建立术前角膜三维模型,并以光轴方向为z轴,获取患者角膜光学区各节点空间坐标;其中,光学区直径为4~10mm。
[0035]
处理模块,用于执行图1所示的方法步骤,包括:
[0036]
s1,根据所述各节点空间坐标,采用zernike多项式对角膜前表面进行面形拟合,并根据矫正要求调整zernike多项式对应项的系数,输出矫正后的目标面形;
[0037]
本实施例中,矫正要求包括矫正屈光度或指定像差。
[0038]
具体的,采用zernike多项式对角膜前表面进行面形拟合,得到波面拟合函数,根据矫正屈光度和指定像差调整zernike多项式对应项的系数,输出矫正后的目标面形ε,如图2所示,具体步骤如下:
[0039]
入射光经过角膜表面产生光程差opd,通过zernike多项式进行波前表面拟合得到:
[0040][0041]
opd=(λ-1)z
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0042]
其中x、y、z为角膜前表面光学区节点的空间坐标,λ为角膜的折射率,ai为zernike多项式第i项系数。
[0043]
示例性的,将矫正屈光度与zernike多项式第四项进行换算,得到矫正后的目标面形,面形方程如下:
[0044]
[0045]
其中δd为对应系数的矫正值,δz为矫正后节点在z方向的位移分量。
[0046]
s2,根据所述目标面形,确定初始激光切削深度,并以所述初始激光切削深度作为当前激光切削深度;
[0047]
本实施中,根据矫正后的目标面形,得到初始激光切削深度δz。
[0048]
激光加工深度l由以下方程定义:
[0049]
l(x,y)=δz=[δdz4(x,y)]/(λ-1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0050]
s3,将术前角膜三维模型减去所述当前激光切削深度对应的激光加工区域,得到术后角膜三维模型;
[0051]
本实施例中,术后角膜三维模型包括超弹性模型、眼压加载、激光切削深度、定义接触以及划分网络。
[0052]
s4,对所述术后角膜三维模型进行有限元分析,并采用zernike多项式拟合角膜前表面的术后面形;若所述术后面形与目标面形偏差小于偏差阈值,则将所述当前激光切削深度作为最终激光切削深度;否则,执行s5;
[0053]
本实施例中,角膜模型为超弹性材料,其受力变形行为采用2阶ogden超弹性方程表征,拟合系数包括μ1=0.003535mpa,α1=103.51、μ2=0.030224mpa,α2=103.61。
[0054]
进一步地,材料的体积模量被定义为无穷大以代表角膜的不可压缩性。
[0055]
角膜与巩膜的接触条件定义为辊支撑,以正四面体剖分角膜,在激光切削区域进行细化处理。
[0056]
采用comsol固体力学模块对术后角膜模型进行有限元分析,得到受力变形数据,转化为角膜上表面的节点位移,采用zernike多项式拟合角膜变形后的面形,拟合方程如下:
[0057][0058]
其中,qi(i=1,2,3.......m)为术后zernike系数,z'为术后的z轴坐标,术后面形与目标面形的均方根rms:
[0059][0060]
其中,zj为术后角膜第j个节点到目标面形的距离,为术后角膜各节点到目标面形的平均距离,m为拟合角膜前表面所需的节点总数。
[0061]
s5,调整所述当前激光切削深度,重复执行s3和s4,直至术后面形与目标面形偏差小于偏差阈值,并以调整后的激光切削深度作为最终激光切削深度,或者,达到预设迭代次数后,以术后面形与目标面形偏差最小时对应的激光切削深度作为最终激光切削深度。
[0062]
本实施例中,通过在s4中zernike多项式对应项加入迭代系数δα,调整所述当前激光切削深度;其中,δα=(ai δd)-qi,(ai δd)为目标面形对应zernike多项式对应项的系数,qi为术后面形对应zernike多项式对应项的系数。
[0063]
示例性的,对zernike第四项加入迭代系数δα,对应的面形方程如下:
[0064][0065]
其中δα=(a4 δd)-q4,所对应地加工深度l为,
[0066]
l(x,y)=δz δz'=[δdz4(x,y) δαz4(x,y)]/(λ-1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0067]
激光加工深度基于式(7)重复步骤s3得到迭代一次后的zernike第四项系数f
(1)
q4与均方根rms1。
[0068]
进一步地,令δα=f
(n)q4-(a4 δd),f
(n)
q4表示为迭代次数为n时术后zernike第四项系数,并得到n个rmsi(i=1,2,3......n),取最小值rms
min
输出所对应的激光加工深度。
[0069]
如图3所示,本发明还提供了一种个性化屈光手术系统,包括:图像采集系统1,计算机控制系统2,激光加工系统3。其中,计算机控制系统2包括存储器4和功能计算机5,存储器4包含对角膜加工区域的迭代循环的逻辑语序;激光加工系统3包括光束控制器7、激光光束8和激光产生器9。
[0070]
图像采集系统1捕获人眼6的实时形貌,导入到功能计算机5中,利用comsol软件建立角膜三维模型,通过步骤s1至s5输出矫正后的激光切削深度,激光加工系统3根据功能计算机5的命令程序产生飞秒激光对角膜进行指定区域加工。
[0071]
综上所述,本发明提供了一种个性化屈光手术装置,根据有限元模拟矫正激光切削深度。其计算过程分为四步,步骤一,建立角膜模型得到角膜各节点空间坐标;步骤二,zernike多项式拟合角膜表面,对指定像差进行矫正得到目标面形;步骤三,导入角膜模型参数,定义眼压加载、接触以及网格划分,进行应力变形分析,经过逻辑程序控制迭代计算出最佳切削深度;步骤四,输入切削参数到光路控制系统对角膜进行切削。本发明解决了传统lasik或smile手术无法针对患者进行个性化加工的问题,并且能够将角膜生物力学性能的影响与加工参数进行耦合,能够更真实的模拟角膜的屈光手术过程,术后像差小、视觉质量高;且模型易收敛、求解效率高,操作方便,适用性较高。
[0072]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。