1.本发明涉及工业自动化领域,具体涉及一种传送带跟踪选件系统。
背景技术:
2.传送带跟踪选件系统通常用于食品和包装行业。典型的食品作业包括:跟踪巧克力、糖果、面包等,将其放入盒中,或归组在一起进行包装。
3.在跟踪过程中,机械手可以在拾起工件的过程中与工件一起移动。在索引传送带系统的情况下,传送带会移动指定的距离,然后停止。图像处理系统寻找工件,然后机械手拾起处于图像处理系统视野范围内的所有工件。在找到并拾起所有工件后,传送带会移动到下一个索引位置。
4.现有的传送带跟踪选件系统由于在取料的过程中,传送带会先停止,让机械手利用相机拍照定位夹取物料,将工作周期延长,降低效率。
技术实现要素:
5.基于此,针对上述问题,有必要提出一种传送带跟踪选件系统,其采用硬件触发方式,操作简单且可以同时触发相机和传送带,精度较高,提供强大的吞吐量,最大限度地减少开发工作,缩减工作周期,提高工作效率。
6.本发明的技术方案是:
7.一种传送带跟踪选件系统,包括控制器、安装于传送带上的编码器、机械手和相机,所述编码器与机械手匹配,所述控制器的信号输出端连接机械手的信号输入端;控制器包括脉冲发生模块、i/o输出模块和视觉处理模块;所述脉冲发生模块的信号输出端连接编码器的信号输入端,所述视觉处理模块的信号输出端连接相机的信号输入端,所述i/o输出模块的第一信号输出端连接脉冲发生模块的信号输入端,i/o输出模块的第二信号输出端连接视觉处理模块的信号输入端。
8.在本技术方案中,首先传送带通过编码器与机械手匹配,每个传送带都安装有编码器,每个编码器需要与脉冲发生模块信号连接,通过触发脉冲输入可以获得编码器的当前位置脉冲,机械手即可知道传送带位置,实现跟踪,然后通过相机拍摄物料在传送带上的位置并把数据发给机械手,让机械手在跟踪传送带的过程中抓取物料,从而达到提高效率的目的。本发明采用硬件触发方式,硬件触发比较简单且可以同时触发相机和传送带,精度较高。同时提供强大的吞吐量,最大限度地减少开发工作,缩减工作周期,提高工作效率。
9.在一个优选地实施例中,该系统还包括相机电源接线盒,所述相机电源接线盒位于所述视觉处理模块与相机之间,且分别连接视觉处理模块以及相机,所述相机电源接线盒包括trig接口和video接口。目的是控制相机的录制和移动操作,实现视觉处理模块对相机的视觉处理,提高精确度。
10.在进一步优选地实施例中,所述视觉处理模块包括bnc接头和同轴电缆,所述bnc接头具有连接所述trig接口的第一bnc接头和连接video接口的第二bnc接头,所述同轴电
缆的信号输出端连接bnc接头的信号输入端,同轴电缆的第一信号输入端连接i/o输出模块的第二信号输出端,同轴电缆的第二信号输入端连接电阻的信号输出端。目的是通过i/o信号来触发视觉抓取工件,既保证了信号的稳定,又提高了信号传输效率。
11.在进一步优选地实施例中,每个所述传送带与一个或多个所述机械手匹配。目的是根据工作需求,采用不同数量的机械手与一个传送带配套,进一步提高工作效率。
12.在更进一步优选地实施例中,多个所述传送带与一个或多个所述机械手匹配。目的是根据工作需求,采用不同数量的机械手与多个传送带配套,采取联动工作的方式,进一步提高工作效率。
13.在更进一步优选地实施例中,所述i/o输出模块的第三信号输出端连接传送带的信号输入端。目的是通过i/o信号控制传送带的移动,使传送带工作稳定,同时实现了实时跟踪。
14.本发明的有益效果是:
15.1、提供强大的吞吐量,最大限度地减少开发工作,缩减工作周期,提高工作效率。
16.2、采用硬件触发方式,硬件触发比较简单且可以同时触发相机和传送带,精度较高。
17.3、每个传送带上的编码器与机械手匹配,实现了跟踪产品的功能。
18.4、采用不同数量的机械手与传送带配套使用,采取联动工作的方式,进一步提高工作效率。
附图说明
19.图1是本发明实施例所述传送带跟踪选件系统的结构示意图;
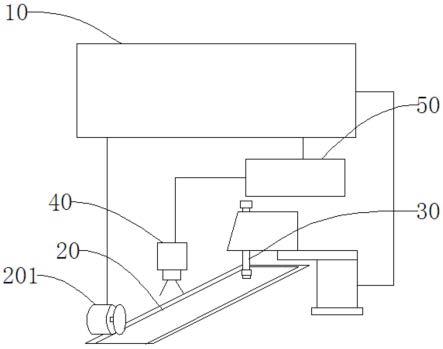
20.图2是本发明实施例所述传送带跟踪选件系统的原理框图;
21.图3是本发明实施例所述视觉处理模块的结构示意图。
22.附图标记说明:
23.10-控制器;101-脉冲发生模块;102-i/o输出模块;103-视觉处理模块;103a-bnc接头;103b-第一bnc接头;103c-第二bnc接头;103d-同轴电缆;104-电阻;20-传送带;201-编码器;30-机械手;40-相机;50-相机电源接线盒;501-trig接口;502-video接口。
具体实施方式
24.下面结合附图对本发明的实施例进行详细说明。
25.实施例1:
26.如图1和图2所示,一种传送带跟踪选件系统,包括控制器10、安装于传送带20上的编码器201、机械手30和相机40,所述编码器201与机械手30匹配,所述控制器10的信号输出端连接机械手30的信号输入端;控制器10包括脉冲发生模块101、i/o输出模块102和视觉处理模块103;所述脉冲发生模块101的信号输出端连接编码器201的信号输入端,所述视觉处理模块103的信号输出端连接相机40的信号输入端,所述i/o输出模块102的第一信号输出端连接脉冲发生模块101的信号输入端,i/o输出模块102的第二信号输出端连接视觉处理模块103的信号输入端。
27.实施例2:
28.如图1和图2所示,一种传送带跟踪选件系统,包括控制器10、安装于传送带20上的编码器201、机械手30和相机40,所述编码器201与机械手30匹配,所述控制器10的信号输出端连接机械手30的信号输入端;控制器10包括脉冲发生模块101、i/o输出模块102和视觉处理模块103;所述脉冲发生模块101的信号输出端连接编码器201的信号输入端,所述视觉处理模块103的信号输出端连接相机40的信号输入端,所述i/o输出模块102的第一信号输出端连接脉冲发生模块101的信号输入端,i/o输出模块102的第二信号输出端连接视觉处理模块103的信号输入端。
29.如图1所示,该系统还包括相机电源接线盒50,所述相机电源接线盒50位于所述视觉处理模块103与相机40之间,且分别连接视觉处理模块103以及相机40,所述相机电源接线盒50包括trig接口501和video接口502。
30.实施例3:
31.如图1和图2所示,一种传送带跟踪选件系统,包括控制器10、安装于传送带20上的编码器201、机械手30和相机40,所述编码器201与机械手30匹配,所述控制器10的信号输出端连接机械手30的信号输入端;控制器10包括脉冲发生模块101、i/o输出模块102和视觉处理模块103;所述脉冲发生模块101的信号输出端连接编码器201的信号输入端,所述视觉处理模块103的信号输出端连接相机40的信号输入端,所述i/o输出模块102的第一信号输出端连接脉冲发生模块101的信号输入端,i/o输出模块102的第二信号输出端连接视觉处理模块103的信号输入端。
32.如图1所示,该系统还包括相机电源接线盒50,所述相机电源接线盒50位于所述视觉处理模块103与相机40之间,且分别连接视觉处理模块103以及相机40,所述相机电源接线盒50包括trig接口501和video接口502。
33.如图3所示,所述视觉处理模块包括bnc接头103a和同轴电缆103d,所述bnc接头103a具有连接所述trig接口501的第一bnc接头103b和连接video接口502的第二bnc接头103c,所述同轴电缆103d的信号输出端连接bnc接头103a的信号输入端,同轴电缆103d的第一信号输入端连接i/o输出模块102的第二信号输出端,同轴电缆103d的第二信号输入端连接电阻104的信号输出端。
34.实施例4:
35.如图1和图2所示,一种传送带跟踪选件系统,包括控制器10、安装于传送带20上的编码器201、机械手30和相机40,所述编码器201与机械手30匹配,所述控制器10的信号输出端连接机械手30的信号输入端;控制器10包括脉冲发生模块101、i/o输出模块102和视觉处理模块103;所述脉冲发生模块101的信号输出端连接编码器201的信号输入端,所述视觉处理模块103的信号输出端连接相机40的信号输入端,所述i/o输出模块102的第一信号输出端连接脉冲发生模块101的信号输入端,i/o输出模块102的第二信号输出端连接视觉处理模块103的信号输入端。
36.如图1所示,该系统还包括相机电源接线盒50,所述相机电源接线盒50位于所述视觉处理模块103与相机40之间,且分别连接视觉处理模块103以及相机40,所述相机电源接线盒50包括trig接口501和video接口502。
37.如图3所示,所述视觉处理模块包括bnc接头103a和同轴电缆103d,所述bnc接头103a具有连接所述trig接口501的第一bnc接头103b和连接video接口502的第二bnc接头
103c,所述同轴电缆103d的信号输出端连接bnc接头103a的信号输入端,同轴电缆103d的第一信号输入端连接i/o输出模块102的第二信号输出端,同轴电缆103d的第二信号输入端连接电阻104的信号输出端。
38.每个所述传送带20与一个或多个所述机械手30配合。
39.实施例5:
40.如图1和图2所示,一种传送带跟踪选件系统,包括控制器10、安装于传送带20上的编码器201、机械手30和相机40,所述编码器201与机械手30匹配,所述控制器10的信号输出端连接机械手30的信号输入端;控制器10包括脉冲发生模块101、i/o输出模块102和视觉处理模块103;所述脉冲发生模块101的信号输出端连接编码器201的信号输入端,所述视觉处理模块103的信号输出端连接相机40的信号输入端,所述i/o输出模块102的第一信号输出端连接脉冲发生模块101的信号输入端,i/o输出模块102的第二信号输出端连接视觉处理模块103的信号输入端。
41.如图1所示,该系统还包括相机电源接线盒50,所述相机电源接线盒50位于所述视觉处理模块103与相机40之间,且分别连接视觉处理模块103以及相机40,所述相机电源接线盒50包括trig接口501和video接口502。
42.如图3所示,所述视觉处理模块包括bnc接头103a和同轴电缆103d,所述bnc接头103a具有连接所述trig接口501的第一bnc接头103b和连接video接口502的第二bnc接头103c,所述同轴电缆103d的信号输出端连接bnc接头103a的信号输入端,同轴电缆103d的第一信号输入端连接i/o输出模块102的第二信号输出端,同轴电缆103d的第二信号输入端连接电阻104的信号输出端。
43.每个所述传送带20与一个或多个所述机械手30配合。
44.多个所述传送带20与一个或多个所述机械手30配合。
45.实施例6:
46.如图1和图2所示,一种传送带跟踪选件系统,包括控制器10、安装于传送带20上的编码器201、机械手30和相机40,所述编码器201与机械手30匹配,所述控制器10的信号输出端连接机械手30的信号输入端;控制器10包括脉冲发生模块101、i/o输出模块102和视觉处理模块103;所述脉冲发生模块101的信号输出端连接编码器201的信号输入端,所述视觉处理模块103的信号输出端连接相机40的信号输入端,所述i/o输出模块102的第一信号输出端连接脉冲发生模块101的信号输入端,i/o输出模块102的第二信号输出端连接视觉处理模块103的信号输入端。
47.如图1所示,该系统还包括相机电源接线盒50,所述相机电源接线盒50位于所述视觉处理模块103与相机40之间,且分别连接视觉处理模块103以及相机40,所述相机电源接线盒50包括trig接口501和video接口502。
48.如图3所示,所述视觉处理模块包括bnc接头103a和同轴电缆103d,所述bnc接头103a具有连接所述trig接口501的第一bnc接头103b和连接video接口502的第二bnc接头103c,所述同轴电缆103d的信号输出端连接bnc接头103a的信号输入端,同轴电缆103d的第一信号输入端连接i/o输出模块102的第二信号输出端,同轴电缆103d的第二信号输入端连接电阻104的信号输出端。
49.每个所述传送带20与一个或多个所述机械手30配合。
50.多个所述传送带20与一个或多个所述机械手30配合。
51.如图2所示,所述i/o输出模块102的第三信号输出端连接传送带20的信号输入端。
52.以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。