1.本发明属于塑料包装盒生产设备技术领域,具体涉及一种用于塑料包装容器的上料装置及焊接系统。
背景技术:
2.塑料包装容器可以对食物进行盛放。现有技术中的塑料包装容器包括底部开设通孔的包装盒,该包装盒开口处的外周壁上设有环状结构,使用者通过环状结构便于对该包装盒进行拿取。
3.该包装盒的底部粘接防水透气膜,因此该包装盒能够盛装含有液体的食物。在通过自加热装置对该包装盒进行加热时,能够使热气进入到包装盒内,便于对该包装盒内的食物进行加热。
4.上述包装盒在进行加工时,需要人工对冲孔完毕的包装盒进行分拣,容易使操作人员产生疲劳,生产效率低。
技术实现要素:
5.本发明实施例提供一种用于塑料包装容器的上料装置及焊接系统,旨在解决通过人工分拣包装盒的方式、生产效率低的技术问题。
6.为实现上述目的,本发明采用的技术方案是:
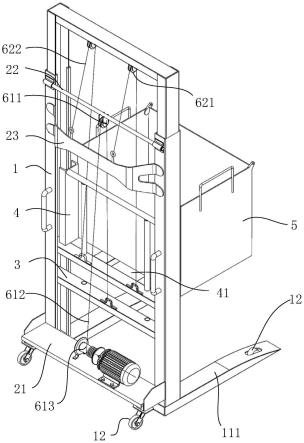
7.提供一种上料装置,用于分拣呈叠放状态的若干塑料包装容器,所述塑料包装容器的外周设有环状结构,所述上料装置包括:
8.上料架,具有适于放置若干所述塑料包装容器的放置通道,所述放置通道竖直设置;
9.旋转部,绕竖直方向与所述上料架转动配合,所述旋转部位于所述放置通道的底部;
10.支撑部,呈螺旋型绕制在所述旋转部的外周壁上;所述支撑部适于插入相邻的两个所述塑料包装容器的所述环状结构之间;以及
11.驱动机构,具有与所述旋转部连接的旋转驱动端;
12.其中,在所述驱动机构的驱动作用下,所述支撑部具有适于随所述旋转部旋转的工作状态;所述支撑部适于支撑所述塑料包装容器的所述环状结构;在所述工作状态,所述支撑部能够与其中一个塑料包装容器的环状结构分离,并与下一个塑料包装容器的环状结构接触。
13.本技术实施例中,将叠放在一起的若干塑料包装容器放置到上料架的放置通道内,支撑部能够与最下方的塑料包装容器的环状结构接触,进而能够对最下方的环状塑料包装容器进行支撑。在工作时,驱动机构能够驱动旋转部转动,进而带动支撑部转动;由于支撑部为螺旋结构,因此在支撑部转动过程中,支撑部会与最下方的塑料包装容器的环状结构分离,并与相邻的塑料包装容器的环状结构接触,进而使最下方的塑料包装容器向下
掉落,相邻的塑料包装容器成为最下方的塑料包装容器。
14.本发明提供的一种上料装置,与现有技术相比,通过上料架、旋转部、支撑部和驱动机构的配合,能够实现对叠放的塑料包装容器的上料,并且能够降低操作人员的劳动强度,提高生产效率。
15.基于同一发明构思,本发明采用的另一技术方案是:
16.提供一种用于塑料包装容器的焊接系统,包括:
17.底座;
18.转盘,绕竖直方向与所述底座转动配合,所述转盘的上表面沿转动周向分别设有放膜位置、上料位置、粘接位置和下料位置;
19.放膜装置,设在所述底座上,所述放膜装置具有适于与所述放膜位置对应的第一夹持端,所述第一夹持端用于将防水透气膜放置到所述放膜位置;
20.上述的上料装置,设在所述底座上,所述放置通道与所述上料位置对齐;
21.粘接装置,设在所述底座上,所述粘接装置具有适于抵紧塑料包装容器底部的抵紧端,所述抵紧端设有超声波焊头;以及
22.下料装置,设在所述底座上,所述下料装置具有适于与所述下料位置对应的第二夹持端,所述第二夹持端适于夹离所述下料位置的塑料包装容器。
23.在一种可能的实现方式中,所述放膜装置包括:
24.剪切机构,包括用于固定防水透气膜的固定组件以及适于裁切防水透气膜的环形刀,所述环形刀沿竖直方向与所述固定组件滑动配合;所述固定组件上设有与所述环形刀对应的开口;以及
25.吸附机构,包括适于沿竖直方向滑动的吸附端,以及适于驱动所述吸附端沿水平方向滑动至所述放膜位置的驱动端;
26.其中,所述吸附端适于与所述开口插接、以吸附所述开口内的环状防水透气膜。
27.在一种可能的实现方式中,所述固定组件包括上模具和下模具,所述上模具沿竖直方向与所述下模具滑动配合;所述上模具和所述下模具之间设有适于防水透气膜穿设的避让槽,所述环形刀设在所述上模具朝向所述下模具的一侧;所述开口设在所述上模具上,且所述开口与所述环形刀的通孔对齐。
28.在一种可能的实现方式中,所述吸附机构还包括设在所述底座上的第一支撑架以及沿水平方向延伸至所述放膜位置上方的滑轨;
29.所述滑轨上设有升降结构,所述升降结构适于沿所述滑轨滑动;所述驱动端设在所述滑轨上,所述驱动端与所述升降结构连接;所述升降结构具有与所述吸附端连接的升降端。
30.在一种可能的实现方式中,所述粘接装置包括:
31.第一固定座;以及
32.抵紧部,沿竖直方向与所述第一固定座滑动配合,所述抵紧部适于抵紧塑料包装容器的底部;所述抵紧部朝向所述转盘的一端为抵紧端,所述超声波焊头设在所述抵紧部上。
33.所述粘接装置还包括限位件;所述限位件具有与所述底座连接的第一端,以及适于横跨所述塑料包装容器顶部的第二端;所述限位件用于在所述抵紧部向上滑动时在高度
方向上限位所述塑料包装容器。
34.在一种可能的实现方式中,所述下料装置包括:
35.第二固定座;
36.插接部,沿竖直方向与所述第二固定座滑动配合;所述插接部适于与塑料包装容器插接;
37.夹持部,为沿所述插接部周向设置的若干个;所述夹持部沿水平方向与所述插接部滑动配合、以与塑料包装容器的内壁面接触;以及
38.动力机构,设在所述第二固定座上,所述动力机构具有适于沿水平方向驱动所述插接部滑动的驱动端。
39.在一种可能的实现方式中,所述下料装置还包括支撑板以及驱动所述支撑板上、下滑动的动力件;所述动力件设在所述第二固定座上,所述支撑板上设有通孔,所述通孔适于与所述塑料包装容器的外周壁接触,所述支撑板的上表面适于与所述塑料包装容器的所述环状结构的下表面接触、以支撑所述塑料包装容器。
40.在一种可能的实现方式中,所述放膜位置、所述上料位置、所述粘接位置和所述下料位置上均设有若干第二限位部,所述第二限位部具有适于与塑料包装容器的外壁面接触的接触端,每一个所述第二限位部均适于沿塑料包装容器的周向设置。
41.本技术实施例中,通过放膜装置能够将防水透气膜放置到转盘的放膜位置,在转盘转动后,防水透气膜能够转动到上料位置。通过旋转部的转动能够使最下方的塑料包装容器掉落至上料位置,进而使塑料包装容器的底部与防水透气膜接触。然后通过转盘的转动能够使塑料包装容器和防水透气膜转动至粘接位置,通过抵紧端抵紧塑料包装容器的底部,并通过超声波焊头能够将防水透气膜焊接到塑料包装容器的底部。焊接完成的塑料包装容器在转盘的作用下转动至下料位置,并通过下料装置的第二夹持端夹离下料位置的塑料包装容器。
42.本发明提供的一种用于塑料包装容器的焊接系统,与现有技术相比,通过底座、转盘、放膜装置、上料装置、粘接装置和下料装置的配合,能够将防水透气膜焊接到塑料包装容器上,且每一个塑料包装容器能够和每一个防水透气膜一一对应。本发明能够降低操作人员的劳动强度,提高生产效率。
附图说明
43.图1为本发明实施例提供的一种用于塑料包装容器的焊接系统的整体示意图;
44.图2为图1中a部的放大示意图;
45.图3为本发明实施例提供的一种用于塑料包装容器的焊接系统的支撑板部分的示意图;
46.图4为本发明实施例提供的一种用于塑料包装容器的焊接系统的支撑部的示意图;
47.图5为本发明实施例提供的一种用于塑料包装容器的焊接系统的放膜装置部分的示意图;
48.图6为图5中b部的放大示意图;
49.图7为本发明实施例提供的一种用于塑料包装容器的焊接系统的插接部的剖面示
意图。
50.附图标记说明:1、上料架;11、放置通道;12、第一限位部;2、旋转部;21、转轴;3、支撑部;4、底座;5、转盘;51、放膜位置;52、上料位置;53、粘接位置;54、下料位置;55、第二限位部;551、低端;552、高端;56、滑槽;6、放膜装置;61、上模具;611、通孔;62、下模具;621、避让槽;63、环形刀;64、吸附块;65、开卷辊;66、收卷辊;67、第一支撑架;671、滑轨;672、螺杆;68、滑移部;69、第一升降气缸;7、粘接装置;71、第一固定座;72、抵紧部;73、l型挡杆;8、下料装置;81、第二固定座;811、延伸部;82、插接部;821、第一腔室;822、第二腔室;823、滑道;824、封堵部;825、连接轴;83、夹持部;84、滑块;841、第二升降气缸;85、螺纹杆;86、支撑板;861、u形孔;87、螺柱。
具体实施方式
51.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
52.请一并参阅图1和图4,现对本发明提供的一种用于塑料包装容器的焊接系统进行说明。所述一种用于塑料包装容器的上料装置,用于分拣呈叠放状态的若干塑料包装容器,塑料包装容器的外周设有环状结构;上料装置包括上料架1、旋转部2、支撑部3以及驱动机构;上料架1具有适于放置若干叠放的塑料包装容器的放置通道11,放置通道11竖直设置;旋转部2绕竖直方向与上料架1转动配合,旋转部2位于放置通道11的底部;支撑部3呈螺旋型绕制在旋转部2的外周壁上;支撑部3适于插入相邻的两个塑料包装容器的环状结构之间;支撑部3适于支撑塑料包装容器的环状结构;驱动机构具有与旋转部2连接的旋转驱动端;其中,在驱动机构的驱动作用下,支撑部3具有适于随旋转部2旋转的工作状态;在工作状态,支撑部3能够与其中一个塑料包装容器的环状结构分离,并与下一个塑料包装容器的环状结构接触。
53.本技术实施例中,将叠放在一起的若干塑料包装容器放置到上料架1的放置通道11内,支撑部3能够与最下方的塑料包装容器的环状结构接触,进而能够对最下方的环状塑料包装容器进行支撑。在工作时,驱动机构能够驱动旋转部2转动,进而带动支撑部3转动;由于支撑部3为螺旋结构,因此在支撑部3转动过程中,支撑部3会与最下方的塑料包装容器的环状结构分离,并与相邻的塑料包装容器的环状结构接触,进而使最下方的塑料包装容器向下掉落,相邻的塑料包装容器成为最下方的塑料包装容器。
54.本发明提供的一种上料装置,与现有技术相比,通过上料架1、旋转部2、支撑部3和驱动机构的配合,能够实现对叠放的塑料包装容器的上料,并且能够降低操作人员的劳动强度,提高生产效率。
55.在一些实施例中,如图1和图4所示,旋转部2为沿放置通道11的圆周方向布设的若干个,本实施例中以4个旋转部2为例进行说明;4个旋转部2沿塑料包装容器的外周面设置,旋转部2上的支撑部3能够与最下方的塑料包装容器的环状结构接触,因此旋转部2能够对最下方的塑料包装容器进行支撑;通过在上料架1上设置4个旋转部2能够提高旋转部2在工作时的稳定性。
56.在一些实施例中,驱动机构包括驱动电机、第一齿轮和第二齿轮,4个旋转部2上均
设有转轴21,转轴21穿过上料架1;第一齿轮固定在转轴21的穿出端,上料架1上转动设有传动轴,第二齿轮设置在传动轴的两端;传动轴两端的第二齿轮分别与两个转轴21的第一齿轮啮合。驱动电机固定在上料架1上,驱动电机的输出轴通过第三齿轮与其中一个转轴21上的第一齿轮啮合。通过驱动电机的输出轴的转动,能够使四个旋转部2转动,进而能够使支撑部3与其中一个塑料包装容器的环状结构分离,并与另一个塑料包装容器的环状结构接触。
57.需要说明的是,驱动机构还可以为驱动电机和皮带,转轴21的穿出端设有带轮,皮带和带轮转动配合,驱动电机的输出轴与其中一个带轮连接。驱动电机通过输出轴驱动带轮转动,进而驱动旋转部2转动。
58.在一些实施例中,如图1和图4所示,上料架1上设有若干适于周向限位塑料包装容器的第一限位部12,若干第一限位部12沿周向设在放置通道11内;第一限位部12为杆状结构、条状结构和弧状结构的一种或多种;本实施例中的第一限位部12以杆状结构为例进行说明。第一限位部12固定在上料架1上,且第一限位部12与塑料包装容器的环状结构的外周壁接触,因此第一限位部12能够对叠放的若干塑料包装容器进行周向限位。
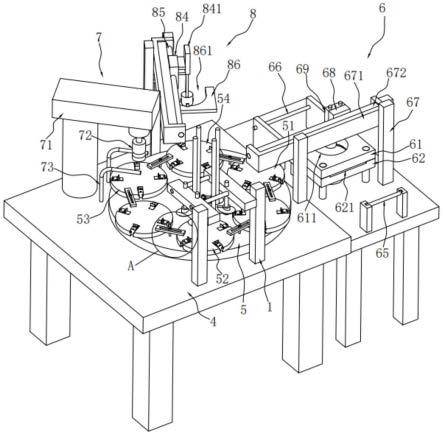
59.基于同一发明构思,如图1至图7所示,本技术实施例还提供一种焊接系统,包括底座4、转盘5、放膜装置6、上料装置、粘接装置7以及下料装置8。转盘5绕竖直方向与底座4转动配合,转盘5的上表面沿转动周向分别设有放膜位置51、上料位置52、粘接位置53和下料位置54;放膜装置6设在底座4上,放膜装置6具有适于与放膜位置51对应的第一夹持端,第一夹持端用于将防水透气膜放置到放膜位置51;上料装置设在底座4上,放置通道11与上料位置52对齐;粘接装置7设在底座4上,粘接装置7具有适于抵紧塑料包装容器底部的抵紧端,抵紧端设有超声波焊头;下料装置8设在底座4上,下料装置8具有适于与下料位置54对应的第二夹持端,第二夹持端适于夹离下料位置54的塑料包装容器。
60.本技术实施例中,通过放膜装置6能够将防水透气膜放置到转盘5的放膜位置51,在转盘5转动后,防水透气膜能够转动到上料位置52。通过旋转部2的转动能够使最下方的塑料包装容器掉落至上料位置52,进而使塑料包装容器的底部与防水透气膜接触。然后通过转盘5的转动能够使塑料包装容器和防水透气膜转动至粘接位置53,通过抵紧端抵紧塑料包装容器的底部,并通过超声波焊头能够将防水透气膜焊接到塑料包装容器的底部。焊接完成的塑料包装容器在转盘5的作用下转动至下料位置54,并通过下料装置8的第二夹持端夹离下料位置54的塑料包装容器。
61.本发明提供的一种用于塑料包装容器的焊接系统,与现有技术相比,通过底座4、转盘5、放膜装置6、上料装置、粘接装置7和下料装置8的配合,能够将防水透气膜焊接到塑料包装容器上,且每一个塑料包装容器能够和每一个防水透气膜一一对应。本发明能够降低操作人员的劳动强度,提高生产效率。
62.需要说明的是,底座4上固定设有旋转电机,旋转电机的输出轴与转盘5的中心位置连接,通过旋转电机的输出轴能够驱动转盘5转动。
63.在一些实施例中,如图1至图7所示,放膜位置51、上料位置52、粘接位置53和下料位置54上均设有若干第二限位部55,第二限位部55具有适于与塑料包装容器的外壁面接触的接触端,每一个第二限位部55均适于沿塑料包装容器的周向设置;本实施例中以4个第二限位部55为例进行说明。第二限位部55倾斜设置;第二限位部55具有适于与塑料包装容器
的外壁面接触的低端551,以及适于导向塑料包装容器的高端552;在塑料包装容器向下落的过程中,第二限位部55的高端552能够对塑料包装容器的外壁面进行导向,在塑料包装容器落到转盘5上后,第二限位部55的低端551与塑料包装容器的外周壁接触,进而对塑料包装容器进行周向限位。
64.需要说明的是,转盘5上设有沿塑料包装容器的直径方向设置的滑槽56,第二限位部55通过螺栓固定在滑槽56内,且第二限位部55能够沿滑槽56滑动。通过调节第二限位部55在滑槽56的位置,能够对不同直径的塑料包装容器进行周向限位。在需要对不同直径的塑料包装容器进行加工时,可以对上料装置进行更换,使得上料装置能够与对应直径的塑料包装容器匹配。
65.在一些实施例中,如图1至图7所示,放膜装置6包括剪切机构以及吸附机构,剪切机构包括用于固定防水透气膜的固定组件以及适于裁切防水透气膜的环形刀63,环形刀63沿竖直方向与固定组件滑动配合;固定组件上设有与环形刀63对应的开口611;吸附机构包括适于沿竖直方向滑动的吸附端,以及适于驱动吸附端沿水平方向滑动至放膜位置51的驱动端。其中,吸附端适于与开口611插接、以吸附开口611内的环状防水透气膜;通过上述设置,环形刀63能够对防水透气膜进行裁切,使得防水透气膜为与塑料包装容器相匹配的圆形形状,进而便于将防水透气膜粘接到塑料包装容器的底部。需要说明的是,防水透气膜的宽度大于环形刀63的直径,因此便于防水透气膜的持续上料。
66.上述固定组件的具体结构为:固定组件包括上模具61和下模具62,上模具61沿竖直方向与下模具62滑动配合;上模具61和下模具62之间设有适于防水透气膜穿设的避让槽621,环形刀63设在上模具61朝向下模具62的一侧;开口611设在上模具61上,且开口611与环形刀63的通孔对齐。
67.上述防水透气膜的上料结构包括开卷辊65、收卷辊66和驱动电机,驱动电机固定在底座4上,驱动电机的输出轴与收卷辊66的一端连接。开卷辊65上设置防水透气膜卷材,收卷辊66用于对裁切完毕的防水透气膜进行收卷。通过驱动电机的输出轴能够驱动收卷辊66转动,因此能够使收卷辊66对裁剪完毕的防水透气膜进行收卷。
68.需要说明的是,也可以对上模具61进行固定,下模具62与上模具61滑动配合,通过下模具62的滑动能够使环形刀63对防水透气膜进行裁切。
69.上述吸附机构还包括第一支撑架67以及与第一支撑架67滑动配合的滑移部68,第一支撑架67固定在底座4上,第一支撑架67具有沿水平方向延伸的滑轨671,滑轨671的一端位于放膜位置51的上方。滑轨671上转动设有螺杆672,滑移部68具有与螺杆672螺纹配合的螺纹孔。第一支撑架67上固定设有驱动电机,驱动电机的输出轴与螺杆672的一端连接,因此能够驱动螺杆672转动。通过螺杆672的转动能够使滑移部68沿滑轨671滑动。
70.需要说明的是,滑轨671上设有升降结构,升降结构包括第一升降气缸69,第一升降气缸69固定在滑移部68上;第一升降气缸69的活塞杆连接有吸附块64,吸附块64上设有吸附孔,吸附块64上的吸附孔通过软管与气源连通;软管上设有电磁阀。在滑移部68滑动到上模具61的开口611时,第一升降气缸69驱动吸附块64插入到上模具的开口611内,吸附孔通过软管与气源连通,因此能够使避让槽621内的防水透气膜吸附在吸附块64上,然后第一升降气缸69驱动吸附块64上升复位。通过滑移部68在滑轨671上的滑动,能够使滑移部68移动到放膜位置51的上方,吸附块64的开口611与气源断开连接,能够使防水透气膜落入到放
膜位置51。
71.在一些实施例中,如图1至图7所示,粘接装置7包括第一固定座71以及抵紧部72;抵紧部72沿竖直方向与第一固定座71滑动配合,抵紧部72适于抵紧塑料包装容器的底部;抵紧部72朝向转盘5的一端为抵紧端,超声波焊头设在抵紧部72上;第一固定座71固定在底座4上,第一固定座71上设有抵紧气缸,抵紧气缸的活塞杆与抵紧部72连接,能够驱动抵紧部72沿竖直方向运动。在塑料包装容器和防水透气膜转动到粘接位置53时,抵紧部72向下滑动并抵紧塑料包装容器,然后通过超声波焊头对塑料包装容器和防水透气膜进行粘接。
72.在一些实施例中,粘接装置7还包括限位件;限位件具有与底座4连接的第一端,以及适于横跨塑料包装容器顶部的第二端;限位件用于在抵紧部72向上滑动时在高度方向上限位塑料包装容器。限位件为两个固定设置在底座4上的l型挡杆73,l型挡杆73的一端横跨塑料包装容器的上方;两个l型挡杆73之间形成适于抵紧部上、下滑动的避让空间。l型挡杆73能够对粘接位置53的塑料包装容器进行高度方向上的限位;在抵紧部72向上滑动过程中,能够避免塑料包装容器跟随抵紧部72向上滑动。
73.在一些实施例中,如图1至图7所示,下料装置8包括第二固定座81、插接部82、夹持部83以及动力机构,插接部82沿竖直方向与第二固定座81滑动配合;插接部82适于与塑料包装容器插接;夹持部83为沿插接部82周向设置的若干个;夹持部83沿水平方向与插接部82滑动配合、以与塑料包装容器的内壁面接触;动力机构设在第二固定座81上,动力机构具有适于沿水平方向驱动插接部82滑动的驱动端;第二固定座81固定在底座4上,第二固定座81具有水平设置的延伸部811,延伸部811延伸到转盘5的下料位置54的上方;在夹持部83夹持塑料包装容器后,插接部82向上运动能够使塑料包装容器与转盘5上的第二限位部55分离。通过动力机构驱动插接部82在水平方向上滑动,能够使插接部82将下料位置54的塑料包装容器带离下料位置54。
74.上述动力机构包括滑块84、螺纹杆85和驱动电机,螺纹杆85转动设置在延伸部811上,滑块84上设有与螺纹杆85配合的螺纹孔;驱动电机固定在第二固定座81上,驱动电机的输出轴与螺纹杆85的一端连接。通过驱动电机的输出轴能够使螺纹杆85转动,进而使滑块84在延伸部811上滑动。
75.滑块84上设有第二升降气缸841,第二升降气缸841的活塞杆与插接部82连接。插接部82的外周壁上设有若干夹持气缸,夹持气缸的活塞杆与夹持部83连接。在插接部82与塑料包装容器插接时,夹持气缸驱动夹持部83沿塑料包装容器的直径方向滑动,因此能够使夹持部83夹持塑料包装容器的内周壁,便于将下料位置54的塑料包装容器夹走。
76.在一些实施例中,插接部82的内部设有第一腔室821和第二腔室822,第一腔室821和第二腔室822之间设有若干滑道823,滑道823沿插接部82的直径方向。每一个滑道823上均设有封堵部824,封堵部824的外周壁与滑道823的内周壁密封配合;封堵部824上设有连接轴825,连接轴825穿出插接部82的外壁并与夹持部83连接。通过第一腔室821和第二腔室822的气压差,能够使连接轴825伸出或缩回,从而便于驱动夹持部83对塑料包装容器进行夹持。
77.另外,下料装置8还包括支撑板86以及驱动支撑板86上、下滑动的动力件;动力件包括螺柱87和驱动电机,螺柱87竖直设在第二固定座81上,螺柱87与第二固定座81转动配合,驱动电机固定在第二固定座81上,驱动电机的输出轴与螺柱87的一端连接。支撑板86具
有与螺柱87螺纹配合的螺纹孔,支撑板86上的通孔为u形孔861。插接部82将粘接完毕的塑料包装容器带到支撑板86的上方,然后使塑料包装容器落在支撑板86上;其中,塑料包装容器的外周壁会从支撑板86的u形孔861中穿过,塑料包装容器开口处的环形结构与支撑板86的上表面接触,因此,支撑板86能够对塑料包装容器进行支撑,且u形孔861能够对塑料包装容器的外周壁进行周向限位。
78.通过螺柱87间歇性的转动,支撑板86每次下降需要放置一个塑料包装容器的高度,使得若干塑料包装容器叠放在一起;在支撑板86上的塑料包装容器达到预设数量后,通过人工将支撑板86上叠放的塑料包装容器取走,然后支撑板86复位。
79.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。