1.本技术涉及垃圾处理技术的领域,尤其是涉及一种无能耗缺氧热解垃圾焚烧装置。
背景技术:
2.生活垃圾是人们日常生活中产生的固体废物。生活垃圾也可分为四大类:可回收垃圾、厨房垃圾、有害垃圾和其它垃圾。但在一些远离市区的偏远地区,垃圾的处理便显得尤为困难。因为在一些偏远地区,没有集中的垃圾收集处理点,很多地方会随意丢放垃圾,这样会导致当地的环境十分恶劣,社会垃圾处理水平低下。
3.因此,为了解决偏远地区垃圾收集处理困难的问题,有些地方会选择集中对垃圾进行焚烧,从而达到将垃圾清理的目的;一般在偏远地区,会设置垃圾焚烧炉,让偏远地区的居民能随时投放垃圾。
4.针对上述中的相关技术,发明人认为在居民投放垃圾时,无论当天的垃圾量有多少,都会启动焚烧炉进行正常的能源消耗而实现燃烧;也就是说,由于居民每天生产的垃圾量都不确定,如果当天垃圾量极少时也会让焚烧炉耗费许多能源进行焚烧,进而会导致能源的严重浪费;因此,亟待需要一种能够根据垃圾量的多少来进行能源燃烧的动态调整的设备。
技术实现要素:
5.为了改善在垃圾投放量少时的资源浪费问题,本技术提供一种无能耗缺氧热解垃圾焚烧装置。
6.本技术提供的一种无能耗缺氧热解垃圾焚烧装置采用如下的技术方案:一种无能耗缺氧热解垃圾焚烧装置,包括裂解箱,所述裂解箱的顶部连通设置有出气管,所述裂解箱靠近出气管的侧壁上设置有投放口、靠近地面的侧壁上设置有换气口,所述裂解箱的内部且靠近换气口处竖直设置有挡板,所述挡板与靠近换气口的裂解箱的侧壁形成换气通道,所述挡板与裂解箱远离换气口的侧壁形成裂解空间,从投放口处放入裂解箱内的垃圾能直接落入裂解空间内;所述裂解箱的底壁上还开设有出灰口;所述裂解箱的内底壁上设置有第一阴燃装置;所述裂解箱的一侧还设置有操作箱,所述操作箱内水平移动设置有多个第二阴燃装置,多个所述第二阴燃装置在操作箱内竖直排列设置;所述裂解箱内还设置有触发驱动装置,一个触发驱动装置对应一个第二阴燃装置;在裂解空间内的垃圾堆积量不断增大且抵触到触发驱动装置时,所述触发驱动装置自动驱动第二阴燃装置从操作箱内移动至裂解空间内并将堆积的垃圾进行分隔。
7.通过采用上述技术方案,将垃圾放入到裂解箱内后,若垃圾的量较少,垃圾量不足以激活触发驱动装置,此时第一阴燃装置则会对量少的垃圾进行燃烧,燃烧则通过阴燃的方式进行,不易产生明火,能源消耗低下,而且垃圾在裂解箱内进行阴燃,不易发生火灾;而当垃圾量增多时,堆积的垃圾的量不断增大会激活触发驱动装置,使得触发驱动装置驱动
第二阴燃装置从操作箱内移动至裂解空间内,并强行将堆积的垃圾给分隔开;而将堆积的垃圾分隔开后,第一阴燃装置可以燃烧处于裂解箱下面的垃圾,伸出的第二阴燃装置可以燃烧处于裂解箱中部以及上部的垃圾,进而提高了垃圾的阴燃裂解效率,燃烧完毕后,垃圾的灰屑会从吹灰口处通出。更为重要的是,裂解箱内的空间密闭,只留出一个换气口进行换气,空气流通率低下,在这种环境下燃烧很容易实现阴燃,而阴燃时温度在200
°
c以下,不易产生二噁英等有毒气体,降低了对大气环境的影响;因而,这样设置后,能够根据垃圾量的多少进行动态调节,即垃圾多时让第一阴燃装置与第二阴燃装置都工作;而垃圾较少时只需要让第一阴燃装置工作即可,能够极大地节约能源,改善在垃圾投放量少时的资源浪费问题。
8.可选的,所述第一阴燃装置包括倾斜底座以及第一点火器,且所述倾斜底座在出灰口的两侧各设置有一个,且所述倾斜底座的倾斜最低端靠近出灰口、倾斜最高端贴合在挡板及裂解箱的内壁上,所述第一点火器在倾斜底座的顶壁上设置有多个。
9.通过采用上述技术方案,直接启动第一点火器,使得第一点火器将处于裂解箱底部的垃圾进行点燃,点燃之后由于裂解箱的密闭性,燃烧会自动变为阴燃状态,从而让垃圾在低温下裂解燃烧,当垃圾燃烧殆尽后会变成灰烬,此时倾斜底座的倾斜面能够让垃圾灰顺着移动到出灰口处,接着将出灰口打开便能够让垃圾灰自动从裂解箱内排出,进而达到点燃垃圾以及排出垃圾灰较为方便的效果。
10.可选的,所述第二阴燃装置包括移动板、切割片以及第二点火器,所述操作箱内水平设置有多个导向板,所述移动板滑动设置在导向板上,所述切割片水平设置在移动板靠近裂解箱侧壁的端部;所述移动板中空设置,所述第二点火器在移动板内设置有多个,在所述移动板的上下两个板面上均开设有多个喷火孔,所述第二点火器的喷口嵌设在喷火孔内;所述裂解箱靠近操作箱的侧壁上开设有供移动板穿过的穿孔,所述触发驱动装置用于驱动移动板通过穿孔在操作箱和裂解箱之间移动;所述穿孔内安装有挤压开合装置,所述移动板在从操作箱进入到裂解箱的过程中自动将挤压开合装置打开、从裂解箱退回到操作箱内后挤压开合装置自动关闭。
11.通过采用上述技术方案,当裂解箱内的垃圾量逐渐增多后激活触发驱动装置,此时触发驱动装置会驱动移动板从操作箱内水平移动到裂解箱内,在移动的过程中,切割片会水平横向切割,将阻挡在移动板移动路径前方的垃圾给切割开,进而让移动板能正常地从操作箱内移动到裂解箱内;此时移动板会将堆积在裂解箱内的垃圾分割成两个部分,这时再启动第二点火器,使得第二点火器对移动板上下板面处的垃圾都点燃,使得堆积的垃圾内能有多个点火处,提高垃圾的阴燃效率。当垃圾燃烧殆尽变成垃圾灰并且垃圾的量降下来后,移动板会自动从裂解箱内退回到操作箱内,此时挤压开合装置关闭,避免垃圾从裂解箱内进入到操作箱内,达到自动化程度较高的效果。
12.可选的,所述挤压开合装置包括上挡片、下挡片、第一弹簧以及第二弹簧,所述裂解箱的侧壁且位于穿孔的内壁上竖直开设有滑动槽,两个所述滑动槽正对设置;所述上挡片与下挡片分别滑动插设在两个滑动槽内,所述第一弹簧设置在滑动槽与上挡片之间,且所述第一弹簧使得上挡片始终具有向穿孔内移动的趋势,所述上挡片与下挡片在自然状态下相互抵接;所述第二弹簧设置在滑动槽与下挡片之间,且所述第二弹簧使得下挡片始终具有向穿孔内移动的趋势;所述上挡片与下挡片靠近操作箱的一侧均设置有倾斜滑面,所
述移动板的端部且位于切割片的两侧均设置有倾斜抵面,所述倾斜抵面与倾斜滑面的倾斜角度一致,且所述切割片的端部与上挡片和下挡片的抵接处相正对。
13.通过采用上述技术方案,当移动板从操作箱内准备往裂解箱内移动时,移动板端部的切割片会预先抵接在上挡片与下挡片相交接的位置,随着移动板继续移动,切割片会强行把上挡片与下挡片分开,而随着移动板的继续移动,移动板端部的倾斜抵面会贴合在倾斜滑面上,并且倾斜抵面会在移动的过程中将倾斜滑面推开,使得上挡片和下挡片继续分开,上挡片与下挡片则会被挤压进入到滑动槽内,让移动板能正常地从穿孔内伸入到裂解箱内;而当移动板完全地从裂解箱内退回到操作箱内后,在第一弹簧与第二弹簧的弹力作用下,上挡片与下挡片会自动从滑动槽内移出并移动到穿孔内,然后将穿孔重新挡住,进而达到自动将穿孔关闭的效果,也使得处于裂解空间内的垃圾或者是垃圾灰不易轻易地进入到操作箱内。
14.可选的,所述触发驱动装置包括触发机构以及驱动机构,所述触发机构安装在裂解箱与操作箱之间;所述驱动机构用于驱动移动板在裂解箱与操作箱之间进行移动,所述触发机构用于在与堆积的垃圾进行接触后自动让驱动机构运行并把移动板从操作箱内推到裂解箱内、并在堆积的垃圾裂解后自动让驱动机构把移动板从裂解箱内推回至操作箱内。
15.通过采用上述技术方案,通过垃圾主动接触触发机构,使得触发机构操控驱动机构启动,进而让驱动机构带动移动板在操作箱与裂解箱之间进行水平移动;而在堆积的垃圾裂解成垃圾会后不再抵触触发机构时,此时驱动机构又会自动把移动板从裂解箱内推回至操作箱内,使得移动板达到自动移出和复位的效果。
16.可选的,所述触发机构包括抵触板、挤压杆、第三弹簧、蓄电池、第一导电片以及第二导电片;所述裂解箱靠近操作箱的侧壁上水平开设有插孔,所述挤压杆通过穿设在插孔内与裂解箱的侧壁滑动配合,所述抵触板竖直设置在挤压杆位于裂解箱内的一端;所述第三弹簧套设在挤压杆位于插孔内的杆段上且第三弹簧一端与插孔的内壁连接、另一端与挤压杆连接;所述裂解箱靠近操作箱的侧壁上水平设置有触发室,所述挤压杆的一端穿过插孔后延伸至触发室内,所述第一导电片安装在挤压杆位于触发室内的一端;所述蓄电池安装在触发室内,且所述第一导电片与蓄电池电连接;所述第二导电片安装在触发室内且与第一导电片水平正对,所述第二导电片与驱动机构电连接;在抵触板被堆积的垃圾推动时且使得挤压杆向操作箱内移动后,所述第一导电片与第二导电片相贴合。
17.通过采用上述技术方案,当从投放口把生活垃圾投入到裂解空间内后,垃圾会在裂解箱内部逐渐堆积,当堆积到垃圾的量到达抵触板处时,垃圾会占据抵触板位于裂解空间内的位置,即垃圾会挤压抵触板,使得抵触板推动挤压杆从裂解箱内往操作箱内水平移动,此时挤压杆带动第一导电片逐渐靠近第二导电片,第三弹簧拉伸。当第一导电片与第二导电片贴合时,蓄电池与驱动机构实现电连接,此时驱动机构便能够实现驱动移动板从操作箱内水平移动到裂解箱内;而当裂解空间内的垃圾裂解变成垃圾灰后,垃圾便不再推动抵触板,在第三弹簧的回弹作用下,第三弹簧将挤压杆重新带回到初始状态,即第一导电片与第二导电片不再贴合,驱动机构不再与蓄电池电连接,进而达到让垃圾的堆积量影响到驱动机构与蓄电池的连接和断开的效果。
18.可选的,所述裂解箱上还设置有辅助推动组件,所述辅助推动组件包括气缸以及
推杆;所述气缸安装在裂解箱靠近挡板的外壁上,且所述气缸的活塞杆水平穿过裂解箱的侧壁以及挡板后延伸至裂解空间内,所述推杆水平安装在气缸的活塞杆上且推杆的长度方向与气缸的活塞杆的长度方向相垂直;一个所述辅助推动组件正对一个触发驱动装置。
19.通过采用上述技术方案,当从投放口往裂解空间内倒入垃圾时,垃圾很有可能会发生堆积在一侧而不会靠近抵触板,这时通过直接启动气缸,让气缸的活塞杆伸长从而让推杆往靠近抵触板侧移动,便能够把堆积在一侧的垃圾推平,从而让堆积在一侧的垃圾能够更均匀地铺在裂解空间内,使得堆放的垃圾能在辅助推动组件的辅助推动作用下接触到相对应的抵触板。
20.可选的,所述驱动机构包括复位电缸、转动电机、磁吸卡接件、卷线轮、绳体、第四弹簧以及推动板;所述复位电缸安装在触发室的外顶壁上,且所述复位电缸的活塞杆竖直向下延伸,所述转动电机安装在复位电缸的活塞杆上且所述转动电机的输出轴竖直向下延伸,所述磁吸卡接件安装在转动电机的输出轴上,所述触发室的顶壁上开设有供磁吸卡接件穿过的开口;所述卷线轮转动设置在触发室内,且所述卷线轮的端部开设有供磁吸卡接件插入的插槽,所述插槽的内壁上开设有侧槽,所述侧槽内安装有吸附卡接件;在所述磁吸卡接件插入到插槽内后,所述吸附卡接件与磁吸卡接件磁性配合后使得转动电机的输出轴与卷线轮同步转动;所述复位电缸和转动电机均与第二导电片电连接;所述绳体绕设在卷线轮上,所述触发室的内底壁上且沿着水平方向开设有滑动条孔,所述推动板滑动设置在滑动条孔内且推动板的下端与移动板远离插孔的板端相连接,所述绳体远离卷线轮的一端与推动板的上端相连接;所述触发室靠近插孔侧设置有连接板,所述第四弹簧设置在连接板与推动板之间,且所述第四弹簧使得推动板始终具有向远离插孔侧移动的趋势。
21.通过采用上述技术方案,当第一导电片与第二导电片相接触后,蓄电池与复位电缸以及转动电机均实现电连接,此时复位电缸便会伸长活塞杆,从而让转动电机的输出轴上的磁吸卡接件伸入到卷线轮的插槽内;而在磁吸卡接件与吸附卡接件的配合下,转动电机的输出轴便能与卷线轮实现同步转动。这时转动电机的输出轴在转动下会带动卷线轮转动,从而实现绳体的收卷及放出,当绳体在卷线轮上收卷时,绳体会拉动推动板在滑动条孔内滑动,从而让推动板推着移动板往裂解箱内移动,移动过程中第四弹簧便会压缩;而当第一导电片与第二导电片不再接触后,复位电缸与转动电机断电,复位电缸的活塞杆会回缩,带动转动电机竖直上移,进而让磁吸卡接件与吸附卡接件脱离,卷线轮不再转动,而压缩的第四弹簧则会从压缩状态重新变为自然状态,在这个过程中第四弹簧会拉动移动板从裂解空间内重新回到操作箱内,进而达到在垃圾堆积时自动让移动板移入裂解空间、在垃圾不再堆积时自动让移动板移出裂解空间的效果。
22.可选的,所述磁吸卡接件包括圆柱杆以及磁铁块;所述圆柱杆同轴线设置在转动电机的输出轴上,所述插槽的形状与圆柱杆的截面形状相适配,所述圆柱杆远离转动电机的杆壁上开设有磁吸槽,所述磁吸槽在圆柱杆的侧杆壁与端杆壁上均留有槽口,所述磁铁块嵌设在磁吸槽内;所述吸附卡接件包括第五弹簧以及吸铁板,所述吸铁板滑动插设在侧槽内,所述第五弹簧的一端与侧槽的端壁连接、另一端与吸铁板连接;在所述侧槽与磁吸槽的侧槽口相正对时,所述吸铁板在磁吸力下与磁铁块相吸附,且所述吸铁板的一侧处于侧槽内、另一侧处于磁吸槽的侧槽口内。
23.通过采用上述技术方案,当圆柱杆插入到卷线轮的插槽内后,圆柱杆会继续转动,
当圆柱杆转动到磁吸槽的侧面槽口与侧槽相正对时,吸铁板与磁铁块也会相正对,在磁吸作用下,吸铁板会从侧槽内滑出插入到侧槽内与磁铁块吸附在一起,此时吸铁板会卡在侧槽与磁吸槽之间,圆柱杆转动则会带动卷线轮同步转动,进而达到实现驱动电机与卷线轮同步连接的效果。
24.可选的,所述出气管内还安装有过滤净化装置,所述过滤净化装置用于对垃圾裂解时产生的气体进行过滤;所述过滤净化装置包括滤网及滤袋,所述滤网以及滤袋均安装在出气管内,且所述滤袋位于滤网的上方,所述滤网上涂覆有负离子胶黏剂,所述滤袋内放置有若干活性炭颗粒。
25.通过采用上述技术方案,滤袋内的活性炭颗粒能够将垃圾裂解阴燃时产生的一些有害气体给吸附,进而让排出的气体内的有害物质含量降低;而在滤网上涂覆负离子胶黏剂后,形成负离子层,由于负离子层中托玛琳的存在,就会在周围形成磁场,该磁场会将空气中分子内的原子和电子分离,电子带负电,废气中的颗粒带正电,正负相聚,从而将颗粒凝结成团,使其附着在滤网表面,达到了过滤的效果。
26.综上所述,本技术包括以下至少一种有益技术效果:1. 将垃圾放入到裂解箱内后,若垃圾的量较少,垃圾量不足以激活触发驱动装置,此时第一阴燃装置则会对量少的垃圾进行燃烧,燃烧则通过阴燃的方式进行,不易产生明火,能源消耗低下,而且垃圾在裂解箱内进行阴燃,不易发生火灾;而当垃圾量增多时,堆积的垃圾的量不断增大会激活触发驱动装置,使得触发驱动装置驱动第二阴燃装置从操作箱内移动至裂解空间内,并强行将堆积的垃圾给分隔开;而将堆积的垃圾分隔开后,第一阴燃装置可以燃烧处于裂解箱下面的垃圾,伸出的第二阴燃装置可以燃烧处于裂解箱中部以及上部的垃圾,进而提高了垃圾的阴燃裂解效率,燃烧完毕后,垃圾的灰屑会从吹灰口处通出。更为重要的是,裂解箱内的空间密闭,只留出一个换气口进行换气,空气流通率低下,在这种环境下燃烧很容易实现阴燃,而阴燃时温度在200
°
c以下,不易产生二噁英等有毒气体,降低了对大气环境的影响;因而,这样设置后,能够根据垃圾量的多少进行动态调节,即垃圾多时让第一阴燃装置与第二阴燃装置都工作;而垃圾较少时只需要让第一阴燃装置工作即可,能够极大地节约能源,改善在垃圾投放量少时的资源浪费问题;2. 当裂解箱内的垃圾量逐渐增多后激活触发驱动装置,此时触发驱动装置会驱动移动板从操作箱内水平移动到裂解箱内,在移动的过程中,切割片会水平横向切割,将阻挡在移动板移动路径前方的垃圾给切割开,进而让移动板能正常地从操作箱内移动到裂解箱内;此时移动板会将堆积在裂解箱内的垃圾分割成两个部分,这时再启动第二点火器,使得第二点火器对移动板上下板面处的垃圾都点燃,使得堆积的垃圾内能有多个点火处,提高垃圾的阴燃效率。当垃圾燃烧殆尽变成垃圾灰并且垃圾的量降下来后,移动板会自动从裂解箱内退回到操作箱内,此时挤压开合装置关闭,避免垃圾从裂解箱内进入到操作箱内,达到自动化程度较高的效果;3. 滤袋内的活性炭颗粒能够将垃圾裂解阴燃时产生的一些有害气体给吸附,进而让排出的气体内的有害物质含量降低;而在滤网上涂覆负离子胶黏剂后,形成负离子层,由于负离子层中托玛琳的存在,就会在周围形成磁场,该磁场会将空气中分子内的原子和电子分离,电子带负电,废气中的颗粒带正电,正负相聚,从而将颗粒凝结成团,使其附着在滤网表面,达到了过滤的效果。
附图说明
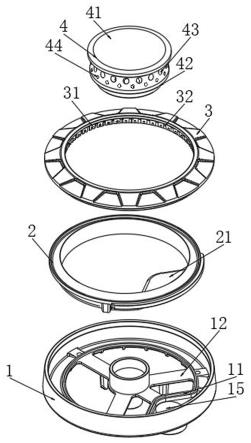
27.图1是本技术实施例的结构示意图。
28.图2是本技术实施例的剖视图。
29.图3是图2中的a部放大图,其中抵触板已经处于受挤压的状态。
30.图4是图3中的b部放大图,旨在展示吸附卡接件与磁吸卡接件的卡紧后的连接关系;图5是本技术实施例的用于展示触发驱动装置与驱动结构的连接关系示意图;图6是图5中的c部放大图,旨在展示吸附卡接件与磁吸卡接件的卡紧过程的连接关系。
31.附图标记说明:1、裂解箱;11、出气管;12、投放口;13、换气口;131、换气通道;14、挡板;15、裂解空间;16、出灰口;17、穿孔;18、滑动槽;19、插孔;2、第一阴燃装置;21、倾斜底座;22、第一点火器;3、操作箱;31、导向板;4、第二阴燃装置;41、移动板;411、倾斜抵面;42、切割片;43、第二点火器;5、触发驱动装置;51、触发机构;511、抵触板;512、挤压杆;513、第三弹簧;514、蓄电池;515、第一导电片;516、第二导电片;52、驱动机构;521、复位电缸;522、转动电机;523、磁吸卡接件;5231、圆柱杆;52311、磁吸槽;5232、磁铁块;524、卷线轮;5241、插槽;5242、侧槽;525、绳体;526、第四弹簧;527、推动板;6、过滤净化装置;61、滤网;62、滤袋;7、挤压开合装置;71、上挡片;72、下挡片;73、第一弹簧;74、第二弹簧;75、倾斜滑面;8、触发室;81、开口;82、滑动条孔;83、连接板;9、辅助推动组件;91、气缸;92、推杆;10、吸附卡接件;101、第五弹簧;102、吸铁板。
具体实施方式
32.以下结合附图1-6对本技术作进一步详细说明。
33.本技术实施例公开一种无能耗缺氧热解垃圾焚烧装置,参照图1、2,包括裂解箱1,裂解箱1的下部分为长方体形、上部分为一个棱台形,在裂解箱1上部分的倾斜壁面上开设有投放口12,投放口12设置有多个,且每个投放口12上都设置有一个开合门,方便居民将投放口12打开后及时关上,避免垃圾产生的臭气排出,而且在裂解箱1的一侧安放有板凳,身高较矮的居民可以踩在板凳上投放垃圾;在裂解箱1的顶部竖直连通设置有一根出气管11,出气管11用于将垃圾阴燃时产生的废气排出,在出气管11内安装有过滤净化装置6,过滤净化装置6用于将垃圾阴燃时产生的废气中的有害物质进行过滤。具体地,过滤净化装置6包括滤网61及滤袋62,滤网61以及滤袋62均安装在出气管11内,且滤袋62位于滤网61的上方,滤网61上涂覆有负离子胶黏剂,滤袋62内放置有若干活性炭颗粒;滤袋62内的活性炭颗粒能够将垃圾裂解阴燃时产生的一些有害气体给吸附,进而让排出的气体内的有害物质含量降低;而在滤网61上涂覆负离子胶黏剂后,形成负离子层,由于负离子层中托玛琳的存在,就会在周围形成磁场,该磁场会将空气中分子内的原子和电子分离,电子带负电,废气中的颗粒带正电,正负相聚,从而将颗粒凝结成团,使其附着在滤网61表面,达到了过滤的效果。
34.结合图1、2,在裂解箱1靠近地面的侧壁上开设有换气口13,换气口13连通设置有一根换气管,而在裂解箱1内靠近换气口13的位置竖直安装有一块挡板14,挡板14的顶部与裂解箱1上部分的倾斜壁面连接,而且挡板14的上部分开设有多个通气孔;即挡板14与靠近
换气口13的裂解箱1侧壁形成换气通道131、与远离换气口13的裂解箱1的侧壁形成裂解空间15,而投放口12则处于裂解空间15的上方,使得投放垃圾时垃圾能够直接掉落到裂解空间15内而不会掉落到换气通道131内;在裂解箱1的底壁上开设有出灰口16,在出灰口16内安装有筛网,筛网能够将没有燃烧的垃圾留在裂解箱1内而把灰尘给通出,筛网是可拆卸的,也可以将筛网拆开进而对裂解箱1的内部进行清理。
35.结合图1、2,在裂解箱1的内底壁上设置有第一阴燃装置2,第一阴燃装置2的作用是对处于裂解空间15内的垃圾进行阴燃燃烧,此处特别说明下,由于裂解空间15较为密闭,也留出了与外界相连通的换气通道131,在这种环境下能够实现阴燃,阴燃在燃烧过程能够控制温度在200
°
c以下,进而不易产生如二噁英等有害气体,而且阴燃的过程是缓慢地,所需要的能量也不多,因此也不用耗费太多电能,适合于偏远地区如农村等。在裂解箱1的侧壁上还设置有操作箱3,操作箱3的形状为长方体形,且操作箱3靠近裂解箱1的一侧开口81设置,在操作箱3内水平移动设置有多个第二阴燃装置4,在本实施例中,第二阴燃装置4设置有两个。在裂解箱1内还设置有触发驱动装置5,一个触发驱动装置5对应一个第二阴燃装置4,在裂解空间15内的垃圾堆积量不断增大且抵触到触发驱动装置5时,触发驱动装置5自动驱动第二阴燃装置4从操作箱3内移动至裂解空间15内并将堆积的垃圾进行分隔;分隔也就是将第二阴燃装置4插入到堆积的垃圾内,进行分层燃烧,提高垃圾的燃烧裂解效率。
36.结合图2,第一阴燃装置2包括倾斜底座21以及第一点火器22,倾斜底座21在裂解箱1内位于出灰口16的两侧各设置有一个,倾斜底座21的截面形状为直角三角形,倾斜底座21的倾斜最高端贴合在裂解箱1的内侧壁上、倾斜最低端贴合在出灰口16的边缘;倾斜底座21的内部为中空设置,第一点火器22就安装在倾斜底座21的内部,即在倾斜底座21的倾斜壁上开设有点火口,第一点火器22的点火嘴便嵌设在点火口内,并且第一点火器22的点火嘴的端面与点火口的端面持平。倾斜底座21的设置能够让垃圾在燃烧裂解后形成的垃圾灰沿着倾斜底座21的倾斜表面下滑到出灰口16处,方便垃圾灰自动排出。
37.结合图2、3,第二阴燃装置4包括移动板41、切割片42以及第二点火器43,在操作箱3内水平设置有多个导向板31,导向板31的数量与第二阴燃装置4的数量相同,即一块导向板31对应一个第二阴燃装置4;移动板41滑动放置在导向板31上,且移动板41与导向板31的板面形状都是长方形,切割片42嵌设在移动板41正对裂解箱1侧壁的一侧端面上,切割片42实质上为加工形成的刀片,片面锋利,能切割一般的软质垃圾。而移动板41的内部也为中空设置,在移动板41的上下两个板面上均开设有喷火孔,第二点火器43的器身处于移动板41内部、而第二点火器43的点火嘴则嵌设在喷火孔内;同样地,第二点火器43的点火嘴的端面也与喷火孔的开口81面相持平,进而避免移动板41在移动过程中垃圾接触到第二点火器43的点火嘴进而损坏第二点火器43的点火嘴。在裂解箱1的侧壁上开设有穿孔17,穿孔17的数量与移动板41的数量相对应,一个穿孔17供一个移动板41在操作箱3与裂解箱1之间移动;并且在穿孔17内安装有挤压开合装置7,在移动板41从操作箱3进入到裂解箱1的过程中自动将挤压开合装置7打开、从裂解箱1退回到操作箱3内后挤压开合装置7自动关闭。
38.具体地,结合图3,挤压开合装置7包括上挡片71、下挡片72、第一弹簧73以及第二弹簧74;在穿孔17的两个孔壁上均竖直开设有滑动槽18,两个滑动槽18在竖直方向上相正对,上挡片71竖直滑动设置在位于穿孔17上方的滑动槽18内、下挡片72竖直滑动设置在位于穿孔17下方的滑动槽18内;第一弹簧73竖直安装在滑动槽18内且第一弹簧73的上端与滑
动槽18的内顶壁连接、下端与上挡片71的顶部相连接,并且第一弹簧73始终具有将上挡片71竖直向下推出滑动槽18的趋势;同样地,第二弹簧74竖直安装在滑动槽18内且第二弹簧74的下端与滑动槽18的内底壁连接、上端与下挡片72的底壁相连接,并且第二弹簧74始终具有将下挡片72竖直向上推出滑动槽18的趋势。在自然状态下,上挡片71与下挡片72均处于从滑动槽18内滑出并抵紧在一起的状态,这种状态下穿孔17处于封闭状态,在裂解空间15内的垃圾便不会从穿孔17内进入到操作箱3;而在上挡片71与下挡片72靠近操作箱3的一侧均设置有倾斜滑面75,处于上挡片71上的倾斜滑面75与下挡片72上的倾斜滑面75为镜像对称设置,而在移动板41的端部且位于切割片42的上下两侧也设置有倾斜抵面411,倾斜抵面411与倾斜滑面75的倾斜角度一致,并且切割片42的端部与上挡片71和下挡片72的抵接处相正对。即当移动板41移动板41从操作箱3内水平往裂解箱1内移动时,切割片42首先会插入到上挡片71与下挡片72之间,强行将上挡片71与下挡片72撑开,接着倾斜抵面411移动会占据倾斜抵面411的位置,进而再次强行把上挡片71与下挡片72分离,让移动板41能够正常地从操作箱3内移动到裂解箱1内。
39.结合图3、5,作为本技术实施例的一种实施方式,触发驱动装置5包括触发机构51以及驱动机构52,触发机构51负责与堆积的垃圾接触,驱动机构52在触发机构51触发运行条件后负责驱动移动板41在操作箱3与裂解箱1之间移动,即触发机构51用于在与堆积的垃圾进行接触后自动让驱动机构52运行并把移动板41从操作箱3内推到裂解箱1内、并在堆积的垃圾裂解后自动让驱动机构52把移动板41从裂解箱1内推回至操作箱3内。
40.具体地,结合图2、3,触发机构51安装在裂解箱1与操作箱3之间,即触发机构51包括抵触板511、挤压杆512、第三弹簧513、蓄电池514、第一导电片515以及第二导电片516;在裂解箱1的侧壁上且位于穿孔17的上方开设有插孔19,挤压杆512滑动插设在插孔19内,而抵触板511竖向安装在挤压杆512位于裂解箱1内的一端,且挤压杆512与抵触板511的下端相连接,抵触板511的长度与裂解箱1的长度相配合;第三弹簧513套设在挤压杆512上且位于插孔19内,即第三弹簧513的一端与穿孔17的内壁连接、另一端与挤压杆512的杆壁相连接,当挤压杆512往操作箱3内水平移动时,第三弹簧513处于逐渐压缩的状态。第一导电片515安装在挤压杆512位于操作箱3内的一端,裂解箱1靠近操作箱3的侧壁上水平设置有触发室8,即触发室8也处于操作箱3内,而第一导电片515就处在触发室8内部,蓄电池514也安装在触发室8内并且与第一导电片515通过导线电连接;第二导电片516竖直安装在触发室8内并且与第一导电片515相正对;当挤压杆512往操作箱3内水平移动后,第一导电片515便会贴在第二导电片516上,且第二导电片516与驱动机构52电连接,即第一导电片515与第二导电片516贴合后,蓄电池514与驱动机构52实现电连接,即驱动机构52便能够运转。总的来说,当垃圾堆积起来后,推动抵触板511往靠近操作箱3侧移动,便会推动挤压杆512上的第一导电片515与第二导电片516贴合,就能实现蓄电池514与驱动机构52的电连接;驱动机构52运转后就能控制移动板41从操作箱3内往裂解箱1内水平移动;而当裂解箱1内的垃圾变成垃圾灰后,堆积的垃圾灰不足以再次推动抵触板511,此时在第三弹簧513的弹力作用下,会让抵触杆重新回到原来的位置,即让第一导电片515与第二导电片516不再贴合,蓄电池514不再与驱动机构52电连接,此时移动板41便会自动再回到操作箱3内,进而实现移动板41随着垃圾的量的增多或减少而自动移动的效果。
41.结合图3、4,驱动机构52包括复位电缸521、转动电机522、磁吸卡接件523、卷线轮
524、绳体525、第四弹簧526以及推动板527;复位电缸521安装在触发室8的外顶壁上,且复位电缸521的活塞杆竖直向下延伸;复位电缸521通过导线与第二导电片516电连接,复位电缸521在通电时会伸出自身的活塞杆,在断电时可以自动让活塞杆缩回;转动电机522安装在复位电缸521的活塞杆上,且转动电机522为步进电机,转动较为缓慢,转动电机522的输出轴也竖直向下延伸,磁吸卡接件523安装在转动电机522的输出轴上。触发室8的外顶壁上开设有开口81,磁吸卡接件523在复位电缸521的驱使下穿过开口81进入到触发室8内;卷线轮524转动安装在触发室8内靠近裂解箱1的位置,即卷线轮524的轮身竖直设置,卷线轮524的下端杆体通过滚动轴承与触发室8的内底壁过盈配合,卷线轮524的轴心线与转动电机522的输出轴的轴心线处于同一竖直线上,在卷线轮524的顶部开设有供磁吸卡接件523插入的插槽5241,在插槽5241的内壁上又开设有侧槽5242,侧槽5242内安装有吸附卡接件10,吸附卡接件10与磁吸卡接件523接触后能够让转动电机522的输出轴带动卷线轮524同步转动;而绳体525绕设在卷线轮524上,在触发室8的内底壁上水平开设有滑动条孔82,滑动条孔82的长度方向与移动板41的移动方向相平行,推动板527则滑动设置在在滑动条孔82内,即推动板527上设置有滑动块,在滑动条孔82的内壁上且沿着滑动条孔82的长度方向开设有滑动槽18,推动板527则是通过滑动块滑动安装在滑动条孔82内的。绳体525远离卷线轮524的一端与推动板527的上板端相连接,而推动板527的下板端与移动板41背离裂解箱1的一端相连接。而在裂解箱1正对操作箱3的箱壁上设置有连接板83,连接板83与推动板527的下板面相正对,第四弹簧526的一端与连接板83连接、另一端则与推动板527的下板面相连接。当推动板527往靠近裂解箱1的方向移动时,会将第四弹簧526压缩。
42.即当第一导电片515与第二导电片516贴合后,蓄电池514与复位电缸521、转动电机522都通电,此时复位电缸521的活塞杆竖直向下延伸,带着转动电机522上的磁吸卡接件523穿过开口81进入到卷线轮524的插槽5241内,并让磁吸卡接件523与吸附卡接件10配合,转动电机522转动后会直接带动卷线轮524实现转动;而由于转动电机522为步进电机,转动较为缓慢,让绳体525缓慢地收缩;绳体525收缩后,会拉着推动板527沿着滑动条孔82的长度方向逐渐往靠近裂解箱1侧移动,此时推动板527便会推着移动板41往靠近裂解箱1的方向移动,此时第四弹簧526便会逐渐压缩,直到移动板41端部的切割片42抵到挡板14上,整个移动板41便会完全把垃圾分隔开来,移动板41上的第二点火器43点火后会对堆积的垃圾进行焚烧。当垃圾燃烧殆尽变成垃圾灰后,其体积减小,抵触板511不再受到抵触,此时第三弹簧513回弹,抵触板511重新回到裂解箱1内的原始位置,第一导电片515与第二导电片516断开,复位电缸521的活塞杆复位,磁吸卡接件523脱离卷线轮524,这时绳体525不再向推动板527施加拉力,第五弹簧101回弹将推动板527往远离裂解箱1侧推动,移动板41此时便会从裂解箱1内逐渐缩回到操作箱3内,进而随着垃圾量的增多实现移动板41自动伸入裂解箱1、在垃圾燃烧殆尽时自动退回操作箱3。
43.如图4、6所示,磁吸卡接件523包括圆柱杆5231以及磁铁块5232,圆柱杆5231同轴线设置在转动电机522的输出轴上,卷线轮524上的插槽5241的形状也与圆柱杆5231的形状相配,且圆柱杆5231竖直下移时能直接插入到卷线轮524的插槽5241内;在圆柱杆5231的杆壁上开设有磁吸槽52311,磁吸槽52311在圆柱杆5231的侧杆壁与端杆壁上均留有槽口,磁铁块5232便安装在磁吸槽52311内;吸附卡接件10包括第五弹簧101以及吸铁板102,吸铁板102滑动插设在侧槽5242内,第五弹簧101的一端侧槽5242的端壁连接、另一端与吸铁板102
连接,且第五弹簧101的弹力小于吸铁板102与磁铁块5232之间的磁性吸附力;在侧槽5242与磁吸槽52311的侧槽5242口相正对时,吸铁板102在磁吸力下与磁铁块5232相吸附,且吸铁板102的一侧处于侧槽5242内、另一侧处于磁吸槽52311的侧槽5242口内,刚好将侧槽5242与磁吸槽52311卡住,圆柱杆5231与卷线轮524便实现同步转动;而当复位电缸521的活塞杆回缩时,圆柱杆5231能直接竖直向上从插槽5241内脱出,即吸铁板102会从磁吸槽52311位于圆柱杆5231端壁上的槽口退出;而当吸铁板102与磁铁块5232脱离后,第五弹簧101会将吸铁板102重新拉回到侧槽5242内;值得注意的是,在本实施例中,触发驱动装置5完全是通过机械原理结构组成,即完全由动态机械过程实现自动平移和复位。
44.而在其它实施例中,触发驱动装置5还可以通过电路控制的方式实现,即触发驱动装置5包括抵板、压力传感器、第一电缸、第二电缸以及控制器,控制器安装在操作箱3内,第一电缸以及第二电缸也安装在操作箱3内,电缸的活塞杆穿过插孔,抵板则设置在电缸的活塞杆端部,而压力传感器安装在抵板内,控制器分别与压力传感器、第一电缸以及第二电缸电连接,第二电缸用于把移动板41推出。其工作原理为:当垃圾量堆积过多时,抵板上的压力传感器能感受到垃圾带来的压力从而传递电信号给控制器,控制器则让第一电缸收缩并且同时让第二电缸伸出;而当垃圾燃烧殆尽,抵板上的压力传感器感受不到压力信号时,将无压力的信号传递给控制器,此时控制器驱动第一电缸伸出并且让第二电缸收缩即可。这种实施方式下的触发驱动装置5则是完全通过电器元件实现调节。
45.本技术实施例一种无能耗缺氧热解垃圾焚烧装置的实施原理为:往裂解箱1内投放垃圾,当垃圾量较小时,通过第一阴燃装置2即可满足裂解箱1内部的垃圾燃烧;当垃圾量逐渐增多后,竖直设置的多个第二阴燃装置4也会陆续启动,插入到垃圾堆内进行点燃操作,使得处于裂解箱1内的垃圾燃烧效率更高;而阴燃产生的气体则会通过出气管11上的过滤净化装置6进行过滤,使得排出的废气污染率降低。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。