技术特征:
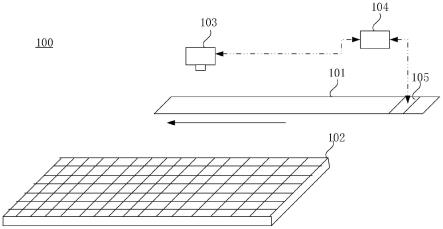
1.一种用于校准运动模组运动的系统,其特征在于,包括:位于所述运动模组一侧表面之上的标定板;位于所述运动模组另一侧表面之上的用于对所述运动模组和所述标定板进行图像采集的视觉检测装置;用于控制所述运动模组运动的控制器和伺服电机;所述伺服电机根据所述控制器下发的目标坐标控制所述运动模组运动;所述视觉检测装置在所述运动模组运动过程中至少采集一次所述运动模组和所述标定板的图像;所述控制器根据所述图像获取所述运动模组的实际坐标,并根据当前机械坐标和所述实际坐标获取误差坐标,以得到误差坐标表,所述控制器利用所述误差坐标表校正所述目标坐标得到校正坐标,控制所述伺服电机以所述校正坐标控制所述运动模组运动至目标位置。2.根据权利要求1所述的用于校准运动模组运动的系统,其特征在于,所述标定板的相邻边互相垂直,且所述标定板的一边与所述运动模组的初始位置和目标位置的连线平行。3.根据权利要求1所述的用于校准运动模组运动的系统,其特征在于,所述标定板的表面与邻近所述运动模组的一侧表面大致平行。4.根据权利要求1所述的用于校准运动模组运动的系统,其特征在于,所述标定板为带有坐标标记的矩阵玻璃基板。5.根据权利要求1所述的用于校准运动模组运动的系统,其特征在于,所述视觉检测装置为ccd相机或cmos相机。6.一种用于校准运动模组运动的方法,其特征在于,基于如权利要求1-5任一项所述的用于校准运动模组运动的系统实现,包括以下步骤:控制所述伺服电机以目标坐标控制所述运动模组运动;控制所述视觉检测装置至少采集一次所述运动模组和所述标定板的图像;根据所述图像获取所述运动模组的实际坐标,并根据所述当前机械坐标和所述实际坐标获取误差坐标,以得到误差坐标表;根据所述误差坐标表校正所述目标坐标得到校正坐标;控制所述伺服电机以所述校正坐标控制所述运动模组运动至目标位置。7.根据权利要求6所述的用于校准运动模组运动的方法,其特征在于,控制所述视觉检测装置采集所述运动模组和所述标定板的图像包括:控制所述视觉检测装置每间隔预设距离采集所述运动模组和所述标定板的图像。8.根据权利要求6所述的用于校准运动模组运动的方法,其特征在于,在控制所述伺服电机以目标坐标控制所述运动模组运动之前还包括:利用所述运动模组带的点镭射量测所述标定板的水平度;当所述水平度小于或等于预设水平度时,控制所述伺服电机以目标坐标控制所述运动模组运动。9.根据权利要求6所述的用于校准运动模组运动的方法,其特征在于,在控制所述伺服电机以目标坐标控制所述运动模组运动之前还包括:判断所述目标坐标是否在所述标定板的校正矩阵内,当所述目标坐标不在所述标定板的校正矩阵内时,控制警示器进行警示。
10.一种机器人,其特征在于,包括如权利要求1-5任一项所述的用于校准运动模组运动的系统。
技术总结
本发明公开了一种用于校准运动模组运动的系统和方法、机器人,其中,系统包括标定板、视觉检测装置、控制器和伺服电机;伺服电机根据控制器下发的目标坐标控制运动模组运动;视觉检测装置在运动模组运动过程中至少采集一次运动模组和标定板的图像;控制器根据图像获取运动模组的实际坐标,并根据目标坐标和实际坐标获取误差坐标,获取误差坐标表,控制器利用误差坐标表校正目标坐标得到校正坐标,以控制伺服电机根据校正坐标控制运动模组运动至目标位置,进而,对于大行程模组以及对大行程模组的精度要求高的设备机台,能够有效地解决设备机台在开发或量产阶段,其精度性能难以检验、缺失检验量化指标、且检验成本高,效率低下等问题。等问题。等问题。
技术研发人员:郑志伟 万健
受保护的技术使用者:博众精工科技股份有限公司
技术研发日:2022.03.14
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。