1.本发明涉及光学自动聚焦技术领域,特别涉及一种用于激光在动态过程中保持聚焦状态的装置及方法。
背景技术:
2.在激光检测领域,激光在动态过程需时刻保持聚焦状态,整个设备才能正常运作。因此,一种实时激光自动聚焦技术及方法在激光应用中至关重要。
3.最早的自动聚焦技术通过柱透镜、四象限探测器改变反射光光斑形状来判断聚焦状态,但是这种方法受环境光影响较大,且聚焦精度和准确率都不太理想。其他的自动聚焦系统装置和方法也比较复杂。因此需要一种聚焦精度高、响应快,结构简单的自动聚焦系统。
技术实现要素:
4.为了解决上述问题,本发明提供了一种实时激光自动聚焦装置及方法,该装置通过分光元件将反射光分为两个光程不同的激光束,在同一光屏上呈现出不同的光斑大小,再由图像采集相机和图像处理模块获得两光斑直径或面积,并利用两个光斑的直径或面积的差值信号来控制运动平台,形成闭环控制来实现自动聚焦。
5.本发明的技术方案
6.一种实时激光自动聚焦装置,包括光学模块,图像采集模块,图像处理模块,运动控制模块,运动平台。所述光学模块包括激光光源,偏振分束镜,1/4波片,显微物镜,聚焦透镜,分光镜,反射镜,滤光片,光屏。激光光束通过偏振分束镜、1/4波片后,反射光的偏振状态发生改变,以此来分离反射光和入射光。
7.所述显微物镜用于将光束聚焦在硅片表面,使用较大数值孔径的显微物镜可以将光斑聚焦的更小;
8.所述聚焦透镜、分光镜、反射镜的组合将反射光聚集且分离为光强一样、传播方向一致的两束光,同时产生光程差,光程差的大小由反射镜相对于分光镜的距离大小决定。若在一定范围内改变分光镜和反射镜之间的距离,可以改变两个光斑在光屏上相对大小,并据此来调节和提高系统精度;
9.两束光通过滤光片滤除其余光,并在光屏上成像,所成的像会随着聚焦状态的改变,呈现出不同大小的光斑,且两光斑的变化趋势不同。在滤光片与光屏之间分别加上一个负透镜可以获得更大的光斑。
10.选用ccd或cmos摄像机做为图像采集模块,采集光屏上的两个光斑图像,并将两个光斑图像传输到计算机系统中计算光斑的直径或面积差值,做为调焦信号,用于控制运动平台的z轴,以带动待测样品1上下移动,实现聚焦。
11.重复上述步骤形成闭环控制,直到两个光斑大小一致,整个过程可使激光在动态过程中保持聚焦状态。
12.本发明的有益效果:
13.与现有技术相比,本发明涉及一种实时的激光自动聚焦装置及方法,通过将反射光分为两束,再利用光程的不同使两束反射光在同一位置处的光斑大小不一致,将两个光斑直径或面积的差值用于激光聚焦状态的判断,实现自动聚焦。本发明具有聚焦精度高、响应快、调整范围大、且聚焦精度可调节等优点,装置简单,适用范围广,可以实现激光聚焦应用中的快速实时聚焦的功能。
附图说明
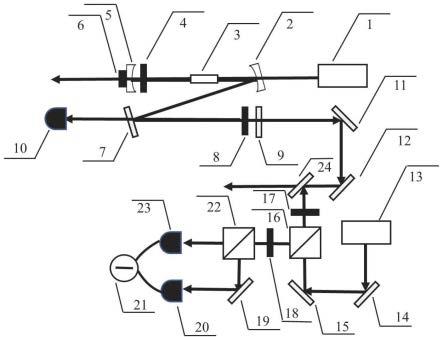
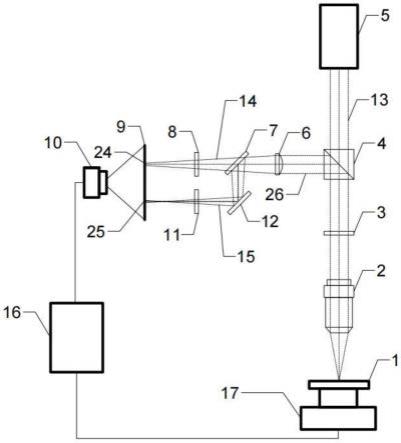
14.图1为本发明所述的实时激光自动聚焦装置的结构示意图;
15.图2为本发明中两光束照射在光屏上时的子午面示意图;
16.图3为本发明中两光斑在不同聚焦状态时的形状;
17.图4为本发明中两光斑面积或直径之差与聚焦状态的关系图;
18.图5为本发明所述的自动聚焦方法的流程图。
19.附图标记说明
20.图1为一种实时激光自动聚焦装置,包含待测样品1,具有高数值孔径的显微物镜2,1/4波片3,偏振分束镜4,激光光源5,聚焦透镜6,半反半透分光镜7,滤光片8、11,成像光屏9,图像采集相机10,反光镜12,激光出射光束13,透射光14,反射光15,计算机控制系统16,xyz运动平台17;
21.图2中包括:透射光14,反射光15,以及光束14、15在成像光屏9上的光斑24,25;
22.图3中包括:光斑24的3个不同状态,分别为负焦状态18,聚焦状态19,正焦状态20;光斑25的3个不同状态,分别为负焦状态21,聚焦状态22,正焦状态23;
具体实施方式
23.下面结合附图和实施列,对本发明的具体实施方式进一步详细描述,以下实例用于说明本发明。但不用来限制发明范围。
24.实施例1:实时激光自动聚焦装置实施方法。
25.如图1所示,初始状态,所述运动平台17位于(x0,y0,z0)点处,激光为聚焦状态。运动平台按设定轨迹运动时,待测样品1相对于显微物镜的位置时刻在变化。同时激光束13依次通过偏振分束镜4,1/4波片3,显微物镜2,并在样品1表面反射,反射光随后通过显微物镜2,1/4波片3,偏振分束镜4,偏振状态发生改变,使得入射光和反射光分离。
26.反射光束26通过聚焦透镜6,分光镜7被分为14、15两束光。再利用反射镜12调整光束15的传播方向使其与光束14一致。在一定范围内改变反射镜12与分光镜7的相对位置,可调整两个光斑在光屏9上的相对大小,以达到调整聚焦精度的目的。为了消除其他光的影响,将光束14和15分别通过滤光片8、11。
27.如图2所示,光束14、15在半透明成像光屏9上分别形成光斑24、25。光屏9位于14、15两束光路焦点之间且到两焦点的距离相同,因为14、15光束存在光程差,所以光斑24、25的大小不一样。
28.在运动过程中,运动平台17控制样品在z轴方向移动,此时光屏上的光斑大小会随着样品的上下移动而变化,且两光斑的变化趋势相反。图3展示了3组不同状态的光斑图像,
图a为负焦状态,即焦点在样品内,此时的光斑18相对于光斑21更大;图b为正焦状态,即焦点处于样品表面,此时光斑19、22的大小一致;图c为正焦状态,焦点位于样品上方,此时的光斑20相对于光斑23更小。
29.图4展示了两光斑大小之差与聚焦状态的关系,a点表示负焦,b点表示位于焦点处,c点表示处于正焦状态。计算机16对图像采集相机10采集到的光斑进行处理,获得两光斑面积,利用两个光斑面积或者直径的差值来控制运动平台17上样品的移动,达到激光的自动聚焦。
30.系统的具体流程:平台开始运动,样品与显微物镜的相对位置发生改变,图像采集模块10采集光屏9上的两个光斑24、25。计算机系统16对图像进行处理,计算两个光斑面积大小和差值(25-24),并判断差值与数值0的关系,差值等于0时系统处于聚焦状态,此时电压的输出为0,运动平台z轴不移动。差值《0时,电压输出降低,控制样品下移,差值》0时,电压输出增加,控制样品上移。上述最后两种情况都会使光屏9上的24、25光斑再次改变,计算机系统再次获取图像信息,控制运动平台的z轴移动,重复上述操作直到系统处于聚焦状态。流程如图5所示。
31.实施例2:一种实时激光自动聚焦方法。
32.通过图像采集相机采集图像,相机可以采用ccd或coms等。首先对采集到的图像依次进行灰度化、二值化处理,将原图像中位于60-255灰度区间的像素灰度值转换成255,接着将二值化图像通过低通滤波器滤除图像中的高频噪声,再对图像进行填充修复,获得一个实心的目标图像,之后对图像进行腐蚀和膨胀使边缘更光滑,接着对目标图像进行遮罩处理,利用函数计算出光斑的中心位置;
33.得到两个光斑的中心位置,并在两个经过所述中心位置的任意正交方向上计算灰度值的宽度,获得所述二值化目标图像的直径,在实时采集过程,由于光源光强较大,相机采集到光斑比较亮,直接读取的原图的灰度值图像与二值化之后的灰度值图像基本上一致,因此为了加快计算速度,可直接将处理之后的二值图像作为获取灰度值的目标图像,灰度值宽度代表了光斑直径,最后取光斑任意正交方向上灰度值宽度的平均值作为光斑的直径,并根据直径计算出两个光斑的直径差做为调焦误差信号,用于控制运动平台17的z轴,以带动待测样品1上下移动,实现聚焦。
34.实施例3:一种实时激光自动聚焦方法。
35.具体的图像处理方法与实施例2一致,不同的是计算二值化处理之后的两个目标图像的面积,可以通过软件自带算法计算面积或利用上述直径计算面积等;并根据两个光斑面积的差做为调焦误差信号,用于控制运动平台17的z轴,以带动待测样品1上下移动,实现聚焦。
36.实施例4:一种实时激光自动聚焦方法。
37.对采集到的两个激光光斑图像进行实施例2的二值化处理,计算得到所述激光光斑图像的中心位置;对采集到的两个激光光斑图像进行灰度化处理,得到灰度化目标图像;经过所述中心位置,在xy方向或者多个方向提取所述灰度化目标图像灰度值曲线,并对数据进行高斯拟合,计算高斯曲线的半高宽来作为激光光斑的直径,并据此分别获得两个所述激光光斑的直径或面积;计算所述两个所述激光光斑的直径或面积的差值,做为调焦误差信号,用于控制运动平台17的z轴,以带动待测样品1上下移动,实现聚焦。
38.进一步的可将实施例2、3、5结合以适用于不同的聚焦环境,达到最优的聚焦效果例如。
39.本实施案例提供的一种实时激光自动聚焦装置及方法,利用图像处理所获得的光斑大小更准确,精度更高,最小单位可以精确到像素点大小。通过两个光斑的面积或直径差值来判断焦点状态,且焦点的每个位置都有唯一的差值与之对应,实现快速、高效率响应。本发明具有聚焦精度高、响应快、调整范围大、且聚焦精度可调节等优点,装置简单,适用范围广,可以实现激光聚焦应用中的快速实时聚焦的功能。
40.以上所述仅为本发明的较佳实例,并不用以限制本发明,凡是在本发明的精神和原则之内,所作的任何修改,等同替换,改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。