1.本发明涉及电梯故障识别技术领域,特别涉及一种基于计算机视觉的电梯非平层开门故障识别装置及方法。
背景技术:
2.随着经济的发展,高层建筑逐渐增多,进而电梯数量快速增加,与之相对应的电梯事故也越来越多,其中,电梯门系统故障是引发电梯事故的主要原因,电梯门系统故障有多种,主要包括:非平层开门(非平层指的是轿门地坎相对于厅门地坎的高差绝对值大于10mm,非平层开门指的是电梯在非平层的位置打开轿门和厅门)、非同步开门、开关门失效、防止门夹人装置失效等类型。非平层开门故障是造成人员伤亡的最主要原因之一,也是现代电梯安全保障技术最难彻底解决的问题之一。因此对非平层开门进行检测和识别具有重要的现实意义。
3.目前非平层开门故障检测方法主要依赖于人工维护排查,这种方式不仅效率很低,而且发现故障隐患周期过久,影响电梯安全运行,现有的梯非平层开门故障识别装置及方法中,专利号为cn107539855b公开的一种电梯平层故障的检测方法和系统,在电梯轿门开启时,获取电梯轿内地坎与电梯所在楼层的层门地坎所在区域的目标图像,计算目标图像中电梯轿内地坎和层门地坎之间的视角差值,在视角差值大于或小于预设值时,判定电梯平层故障,由于使用过程中,电梯轿厢内站有乘客,乘客会遮挡摄像头拍摄角度,造成无法准确拍摄电梯轿内地坎与电梯所在楼层的层门地坎所在区域的目标图像,造成识别不清楚,进而故障检测不准确,因此有必要提出一种新的解决方案。
4.现有的非平层开门故障检测方法中主要依赖于人工维护排查,这种方式不仅效率很低,而且发现故障隐患周期长,现有的平层开门故障检测装置中通过在电梯顶角设置一个摄像机,通过摄像机拍摄图像,摄像机拍摄的图像往往被电梯乘客遮挡,无法清晰拍摄电梯轿厢位置与楼层平层地坎位置图像,处理不精确,现有的非平层开门故障检测系统存在故障检测不准确的问题,为此,我们提出一种基于计算机视觉的电梯非平层开门故障识别装置及方法。
技术实现要素:
5.本发明的主要目的在于提供一种基于计算机视觉的电梯非平层开门故障识别装置及方法,可以有效解决背景技术中:现有的非平层开门故障检测方法主要依赖于人工维护排查,这种方式不仅效率很低,而且发现故障隐患周期长,现有的非平层开门故障检测系统存在故障检测不准确的问题。
6.为实现上述目的,本发明采取的技术方案为:一种基于计算机视觉的电梯非平层开门故障识别装置,包括设置在楼层平层地坎以及电梯轿厢之间的故障识别装置,楼层平层地坎与电梯轿厢之间存在一定缝隙,所述电梯轿厢靠近出口端顶部开设有第一安装槽,所述楼层平层地坎平层侧壁上相对开设有第二安装槽,所述故障识别装置包括安装在所述
第一安装槽内的第一捕捉组件以及设置在所述第二安装槽内的机械预警组件,在实际使用过程中,根据电梯轿厢尺寸以及楼层平层距离电梯的间距,调节第一安装槽的位置以及捕捉组件的位置,使得该装置适用于不同型号不同尺寸的电梯;
7.所述第一捕捉组件包括设置在第一安装槽内的固定轴、设置在固定轴上的第一相机和第二相机以及设置在楼层平层地坎侧壁上的捕捉座,所述第一相机以及所述第二相机关于所述固定轴对称分布,且所述第一相机与所述第二相机中轴线与所述水平面之间存在夹角,所述捕捉座上部设有捕捉块,所述捕捉块上表面为斜面,所述第一相机与所述第二相机中轴线相互平行并构成一个平面,所述捕捉块上表面与上述平面相互垂直,且所述捕捉块上表面中心点位于上述平面上,且该点还位于所述第一相机与所述第二相机中心点连线的中垂面上,使得第一相机以及第二相机能够刚好拍摄捕捉块的位置,得到的两幅图像中,便于计算捕捉块的世界坐标;
8.所述机械预警组件包括设置在第二安装槽内的转轴,所述转轴上套设有转动管,两个所述转动管一端分别设有第一弧形杆以及第二弧形杆,所述第一弧形杆与所述第二弧形杆在水平方向上的投影相互平行,且所述第一弧形杆与所述第二弧形杆远离转动管一端的内壁分别设有第一压力传感器和第二压力传感器,所述第一压力传感器和第二压力传感器上设有第二弹簧,所述第二弹簧上设有按压块,所述电梯轿厢出口端下部侧壁对称设有凸块,两个所述凸块与所述按压块相互适配,电梯轿厢上下运行过程中,凸块不断挤压每一楼层设置的按压块,当电梯轿厢停稳后通过测量压力数据,推测出第二弹簧的形变量,进而确定电梯轿厢与楼层平层地坎之间的距离。
9.优选地,所述楼层平层地坎上设有第一活动门,所述电梯轿厢上设有第二活动门,所述固定轴上相对设有采集相机,所述采集相机照射方向朝所述电梯轿厢内部,第一活动门以及第二活动门主要用于辅助电梯轿厢开门使用,且每层楼层设置一个第一活动门,采集相机主要用于采集电梯轿厢内部视频图像,用作分析电梯轿厢内是否有人。
10.优选地,所述机械预警组件还包括设置在转动管另一端的连杆,所述连杆一端活动设有第一转杆,所述第一转杆上套设有第一转管,第一转管围绕第一转杆旋转,所述第二安装槽内的转轴内壁设有转动座,所述转动座上设有第二转杆,所述第二转杆上套设有第二转管,第二转管围绕第二转杆旋转,所述第一转管与所述第二转管高度齐平,且所述第一转管与所述第二转管之间设有第一弹簧,弹簧的主要作用是电梯轿厢运行过程中,凸块挤压按压块、第一弧形杆或者第二弧形杆后,第一弹簧对第一弧形杆或者第二弧形杆的位置进行复原。
11.优选地,所述楼层平层地坎与所述电梯轿厢之间存在缝隙,所述捕捉座位于上述缝隙中,且位于楼层平层地坎侧壁中心位置处,且每层楼层的楼层平层地坎侧壁中心位置处均设有捕捉座以及捕捉块,根据不同的电梯尺寸选择合适的位置进行安装捕捉座以及捕捉块,并通过第一相机以及第二相机进行位置调控,最终确定精确位置。
12.优选地,所述电梯轿厢底部电梯地坎侧壁相对设有两个微型红外发射器,所述楼层平层地坎侧壁设有两组圆形红外接收头,两个所述微型红外发射器与两组所述圆形红外接收头相互对应,每组所述圆形红外接收头等间距上下阵列分布,根据对应接收红外线的圆形红外接收头自身标号数确定楼层平层地坎与电梯轿厢地坎的高度差。
13.一种基于计算机视觉的电梯非平层开门故障识别装置的使用方法,包括具体以下
步骤:
14.s1:建立电梯非平层开门故障识别系统,所述故障识别系统内建立有数据采集模块、数据处理模块以及预警模块,数据采集模块主要用于采集电梯运行过程中实时产生的数据,数据处理模块对及时采集的数据进行处理,预计模块根据处理结果进行语音预警,并自动向监管部门进行实时反馈;
15.s2:电梯使用过程中,电梯轿厢上行的过程中,当电梯轿厢到达设定楼层后,所述凸块挤压按压块,所述按压块挤压第二弹簧,对应的第二弹簧上端挤压第二压力传感器,第二压力传感器获取压力数据,电梯轿厢下行的过程中,当电梯轿厢到达设定楼层后,所述凸块挤压按压块,所述按压块挤压第二弹簧,对应的第二弹簧下端挤压第一压力传感器,第一压力传感器获取压力数据,第一活动门以及第二活动门横向滑动打开后,采用bouguet算法原理完成对第一相机以及第二相机的校正,经过bouguet算法校正后的相机从数学上完成了第一相机以及第二相机的前向平行配置,使得左右图像具有行对准的特点,缩短了立体匹配的时间,减少算力,第一相机以及第二相机快速拍摄捕捉块图像得到左图像以及右图像,所述微型红外发射器沿水平方向发射红外线,对应的所述圆形红外接收头接收上述红外线;
16.s3:故障识别系统对每组等间距上下阵列分布的圆形红外接收头依次进行标号,所述数据采集模块中采用位mcu做为主控芯片的下位机,通过mcu的io口采集电梯上下运行过程中第一压力传感器以及第二压力传感器的压力数据,以及第一相机和第二相机分别拍摄的左图像和右图像对应接收红外线的圆形红外接收头自身标号数。
17.s4:上位机在串口接收到数据后,将数据保存到上数据处理模块内建立的数据库中,所述数据处理模块针对数据库中的数据进行处理,进而进行故障分析,分析过程包括具体以下步骤:
18.s401:基于计算机视觉对左图像以及右图像进行图像处理,以第一相机投影中心为基准点o1,以第二相机投影中心为o2,设定o2到o1距离定义为基线距离b,设定捕捉块为物体点p在第一相机下的坐标(xc,yc,zc),设定p
l
(u
l
,v
l)
为在捕捉块目标点在左图像上的坐标,p2(u2,v
2)
为捕捉块目标点在右图像上的坐标,经bouguet算法校正后v
l
=v2=v,且第一相机以及第二相机的焦距一致,即f
l
=f2=f,则相机坐标系下p点的三维坐标标由三角几何关系可以计算得式中:d=u
l
-u2为左右相机的视差,左光心c在图像上的成像点(c
x
,cy),pw在世界坐标系的坐标与相机坐标系下的关系为:左相机成像面上的目标点只要在右成像面上找到其对应的匹配点,最终确定捕捉块在世界坐标下的坐标(xw,yw,zw),通过确定捕捉块的位置进而确定位
置;
19.s402:首先测定楼层平层地坎与电梯轿厢平行状态下的第一压力数据,通过第一压力传感器以及第二压力传感器测量出电梯轿厢运行过程中的第二压力数据,判断第二压力数据与第一压力数据是否相同,若不相同,在根据第二压力数据计算第二弹簧的形变量,根据第二弹簧的形变量得到楼层平层地坎与电梯轿厢地坎的高度差;
20.s403:根据对应接收红外线的圆形红外接收头自身标号数确定楼层平层地坎与电梯轿厢地坎的高度差;
21.s5:所述数据处理模完成故障分析后,若出现电梯非平层开门故障,预警模块及时发出预警,电梯轿厢内设置有语音播报喇叭,实现进行语音警报。
22.优选地,所述故障识别系统还包括监管模块以及系统恢复模块,所述预警模块及时发出预警的同时,将电梯故障信号发送至监管模块,监管模块用于控制电梯运行,进而关闭电梯,将电梯固定在该楼层处,监管模块对故障电梯及时进行整修,确保故障电梯能够快速使用,提高电梯的使用效果。
23.优选地,步骤s2中,电梯轿厢上行的过程中,到达设定楼层后,在继续上行时,所述凸块挤压按压块,所述按压块挤压第二弹簧,对应的第二弹簧上端挤压第二压力传感器,当第二弹簧到达极限状态下,所述凸块使得第二弧形杆通过转动管在转轴上旋转,使得第二弧形杆缩回第二安装槽内,电梯轿厢下行的过程中,到达设定楼层后,在继续下行时,同理第一弧形杆缩回第二安装槽内,电梯轿厢行驶过后,在第二弹簧的作用下,第一弧形杆以及第二弧形杆重新复位。
24.优选地,预警模块同时进行预警语音播报,预警模块通过采集相机25检测到轿厢内有人员活动是发送指令给播放线程,通过语音喇叭播放响应的信息,有效提醒乘客,电梯故障,请勿使用。
25.与现有技术相比,本发明具有如下有益效果:
26.本发明之装置中,通过设置捕捉组件,通过将第一相机以及第二相机设置在电梯轿厢靠近出口端顶部开设有的第一安装槽中,并且在楼层平层地坎侧壁上设置捕捉座,第一相机以及第二相机关于固定轴对称分布,且第一相机与第二相机中轴线与水平面之间存在夹角,捕捉座上部设有捕捉块,捕捉块上表面为斜面,第一相机与第二相机中轴线相互平行并构成一个平面,捕捉块上表面与上述平面相互垂直,且捕捉块上表面中心点位于上述平面上,使得第一相机以及第二相机分别拍摄的左图像和右图像拍摄更为精确,且不会出现乘客遮捕捉座,且得到的左图像以及右图像更加有利于在数据处理系统中进行图像分析,有利于精确得到捕捉块作为目标点的世界坐标,进而得到楼层平层地坎与电梯轿厢地坎之间的高度差,用于判断是否出现非平层开门,通过得到更加精确的图像,进而提高电梯非平层开门故障识别的精确度
27.本发明之方法中,在数据处理模块中,基于计算机视觉对左图像以及右图像进行图像处理,以第一相机为基准点,设定第二相机作为投影中心到第一相机的距离定义为基线距离,设定捕捉块为物体点在第一相机下的坐标,设定捕捉块在左图像上的坐标,以及捕捉块目标点在右图像上的坐标,第一相机以及第二相机经校正后,使得第一相机以及第二相机的焦距一致,则相机坐标系下捕捉块的三维坐标标由三角几何关系可以计算得出,左相机成像面上的目标点只要在右成像面上找到其对应的匹配点,仅仅通过对两幅图像进行
处理,从中计算出捕捉块的世界坐标值,最终根究捕捉块的世界坐标值判断是否出现非平层开门,减少计算机视觉图像处理的运算力,提高数据处理模块的运行速度,进而大大提高故障识别系统的预警速率,保证系统能够实现及时预警,提高电梯的安全性。
28.本发明之装置中,通过设置机械预警组件,在楼层平层地坎侧壁上相对设置机械预警组件,其中机械预警组件包括设置在第二安装槽内的转轴,转轴上套设有转动管,两个转动管一端分别设有第一弧形杆以及第二弧形杆,第一弧形杆与第二弧形杆在水平方向上的投影相互平行,且第一弧形杆与第二弧形杆远离转动管一端的内壁分别设有第一压力传感器和第二压力传感器,第一压力传感器和第二压力传感器上设有第二弹簧,第二弹簧上设有按压块,电梯轿厢出口端下部侧壁对称设有凸块,两个凸块与按压块相互适配,使得电梯在上下运行过程中,电梯轿厢上行的过程中,当电梯轿厢到达设定楼层后,凸块挤压按压块,按压块挤压第二弹簧,对应的第二弹簧上端挤压第二压力传感器,第二压力传感器获取压力数据,电梯轿厢下行的过程中,当电梯轿厢到达设定楼层后,凸块挤压按压块,按压块挤压第二弹簧,对应的第二弹簧下端挤压第一压力传感器,第一压力传感器获取压力数据,首先测定楼层平层地坎与电梯轿厢平行状态下的第一压力数据,通过第一压力传感器以及第二压力传感器测量出电梯轿厢运行过程中的第二压力数据,判断第二压力数据与第一压力数据是否相同,若不相同,在根据第二压力数据计算第二弹簧的,根据第二弹簧的得到楼层平层地坎与电梯轿厢地坎的高度差,最终精确得到楼层平层地坎与电梯轿厢地坎的高度差,进而判断是否出现电梯非平层开门,使得故障识别装置识别更加精确。
附图说明
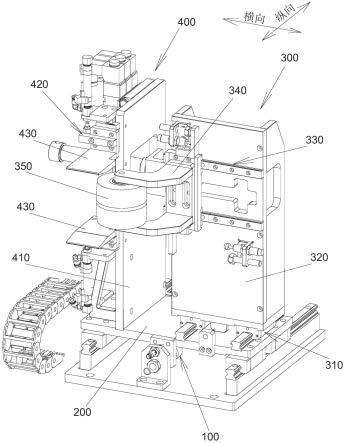
29.图1为本发明一种基于计算机视觉的电梯非平层开门故障识别装置的整体结构示意图;
30.图2为本发明一种基于计算机视觉的电梯非平层开门故障识别装置的主视结构示意图;
31.图3为本发明图2中a-a处的剖视结构示意图;
32.图4为本发明图2中b-b处的剖视结构示意图;
33.图5为本发明一种基于计算机视觉的电梯非平层开门故障识别装置中电梯轿厢的整体结构示意图;
34.图6为本发明一种基于计算机视觉的电梯非平层开门故障识别装置中楼层平层地坎的整体结构示意图;
35.图7为本发明图3中d处的局部放大结构示意图;
36.图8为本发明图4中e处的局部放大结构示意图;
37.图9为本发明图5中c处的局部放大结构示意图;
38.图10为本发明图5中f处的局部放大结构示意图;
39.图11为本发明图6中g处的局部放大结构示意图;
40.图12为本发明图6中h处的局部放大结构示意图;
41.图13为本发明图6中i处的局部放大结构示意图;
42.图14为本发明一种基于计算机视觉的电梯非平层开门故障识别装置的使用方法的流程图;
43.图中:1、楼层平层地坎;2、电梯轿厢;3、第一活动门;4、第二活动门;5、第一相机;6、第二相机;7、捕捉座;8、捕捉块;9、转轴;10、转动管;11、连杆;12、第一转杆;13、第一转管;14、转动座;15、第二转杆;16、第二转管;17、第一弹簧;18、第一弧形杆;19、第二弧形杆;20、第一压力传感器;21、第二压力传感器;22、第二弹簧;23、按压块;24、凸块;25、采集相机;26、微型红外发射器;27、圆形红外接收头;28、固定轴。
具体实施方式
44.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
45.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
46.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
47.如图1-14所示,本发明为一种基于计算机视觉的电梯非平层开门故障识别装置,包括设置在楼层平层地坎1以及电梯轿厢2之间的故障识别装置,楼层平层地坎1与电梯轿厢2之间存在一定缝隙,电梯轿厢2靠近出口端顶部开设有第一安装槽,楼层平层地坎1平层侧壁上相对开设有第二安装槽,故障识别装置包括安装在第一安装槽内的第一捕捉组件以及设置在第二安装槽内的机械预警组件,在实际使用过程中,根据电梯轿厢尺寸以及楼层平层距离电梯的间距,调节第一安装槽的位置以及捕捉组件的位置,使得该装置适用于不同型号不同尺寸的电梯;
48.第一捕捉组件包括设置在第一安装槽内的固定轴28、设置在固定轴28上的第一相机5和第二相机6以及设置在楼层平层地坎1侧壁上的捕捉座7,第一相机5以及第二相机6关于固定轴28对称分布,且第一相机5与第二相机6中轴线与水平面之间存在夹角,捕捉座7上部设有捕捉块8,捕捉块8上表面为斜面,第一相机5与第二相机6中轴线相互平行并构成一个平面,捕捉块8上表面与上述平面相互垂直,且捕捉块8上表面中心点位于上述平面上,且该点还位于所述第一相机5与所述第二相机6中心点连线的中垂面上,使得第一相机5以及第二相机6能够刚好拍摄捕捉块8的位置,得到的两幅图像中,便于计算捕捉块8的世界坐标;
49.机械预警组件包括设置在第二安装槽内的转轴9,转轴9上套设有转动管10,两个转动管10一端分别设有第一弧形杆18以及第二弧形杆19,第一弧形杆18与第二弧形杆19在水平方向上的投影相互平行,且第一弧形杆18与第二弧形杆19远离转动管10一端的内壁分别设有第一压力传感器20和第二压力传感器21,第一压力传感器20和第二压力传感器21上设有第二弹簧22,第二弹簧22上设有按压块23,电梯轿厢2出口端下部侧壁对称设有凸块
24,两个凸块24与按压块23相互适配,电梯轿厢2上下运行过程中,凸块24不断挤压每一楼层设置的按压块23,当电梯轿厢2停稳后通过测量压力数据,推测出第二弹簧22的形变量,进而确定电梯轿厢2与楼层平层地坎1之间的间距。
50.其中,楼层平层地坎1上设有第一活动门3,电梯轿厢2上设有第二活动门4,固定轴28上相对设有采集相机25,采集相机25照射方向朝电梯轿厢2内部,第一活动门3以及第二活动门4主要用于辅助电梯轿厢2开门使用,且每层楼层设置一个第一活动门3,采集相机25主要用于采集电梯轿厢2内部视频图像,用作分析电梯轿厢2内是否有人。
51.其中,机械预警组件还包括设置在转动管10另一端的连杆11,连杆11一端活动设有第一转杆12,第一转杆12上套设有第一转管13,第一转管13围绕第一转杆12旋转,第二安装槽内的转轴9内壁设有转动座14,转动座14上设有第二转杆15,第二转杆15上套设有第二转管16,第二转管16围绕第二转杆15旋转,第一转管13与第二转管16高度齐平,且第一转管13与第二转管16之间设有第一弹簧17,弹簧17的主要作用是电梯轿厢2运行过程中,凸块24挤压按压块23、第一弧形杆18或者第二弧形杆19后,第一弹簧17对第一弧形杆18或者第二弧形杆19的位置进行复原。
52.其中,楼层平层地坎1与电梯轿厢2之间存在缝隙,捕捉座7位于上述缝隙中,且位于楼层平层地坎1侧壁中心位置处,且每层楼层的楼层平层地坎1侧壁中心位置处均设有捕捉座7以及捕捉块8,根据不同的电梯尺寸选择合适的位置进行安装捕捉座7以及捕捉块8,并通过第一相机5以及第二相机6进行位置调控,最终确定精确位置。
53.其中,电梯轿厢2底部电梯地坎侧壁相对设有两个微型红外发射器26,楼层平层地坎1侧壁设有两组圆形红外接收头27,两个微型红外发射器26与两组圆形红外接收头27相互对应,每组圆形红外接收头27等间距上下阵列分布,根据对应接收红外线的圆形红外接收头27自身标号数确定楼层平层地坎1与电梯轿厢2地坎的高度差。
54.一种基于计算机视觉的电梯非平层开门故障识别装置的使用方法,包括具体以下步骤:
55.s1:建立电梯非平层开门故障识别系统,故障识别系统内建立有数据采集模块、数据处理模块以及预警模块,数据采集模块主要用于采集电梯运行过程中实时产生的数据,数据处理模块对及时采集的数据进行处理,预计模块根据处理结果进行语音预警,并自动向监管部门进行实时反馈;
56.s2:电梯使用过程中,电梯轿厢2上行的过程中,当电梯轿厢2到达设定楼层后,凸块24挤压按压块23,按压块23挤压第二弹簧22,对应的第二弹簧22上端挤压第二压力传感器21,第二压力传感器21获取压力数据,电梯轿厢2下行的过程中,当电梯轿厢2到达设定楼层后,凸块24挤压按压块23,按压块23挤压第二弹簧22,对应的第二弹簧22下端挤压第一压力传感器20,第一压力传感器20获取压力数据,第一活动门3以及第二活动门4横向滑动打开后,采用bouguet算法原理完成对第一相机5以及第二相机6的校正,经过bouguet算法校正后的相机从数学上完成了第一相机5以及第二相机6的前向平行配置,使得左右图像具有行对准的特点,缩短了立体匹配的时间,减少算力,第一相机5以及第二相机6快速拍摄捕捉块8图像得到左图像以及右图像,微型红外发射器26沿水平方向发射红外线,对应的圆形红外接收头27接收上述红外线;
57.s3:故障识别系统对每组等间距上下阵列分布的圆形红外接收头27依次进行标
号,数据采集模块中采用8位mcu做为主控芯片的下位机,通过mcu的io口采集电梯上下运行过程中第一压力传感器20以及第二压力传感器21的压力数据,以及第一相机5和第二相机6分别拍摄的左图像和右图像对应接收红外线的圆形红外接收头27自身标号数。
58.s4:上位机在串口接收到数据后,将数据保存到上数据处理模块内建立的数据库中,数据处理模块针对数据库中的数据进行处理,进而进行故障分析,分析过程包括具体以下步骤:
59.s401:基于计算机视觉对左图像以及右图像进行图像处理,以第一相机5投影中心为基准点o1,以第二相机6投影中心为o2,设定o2到o1距离定义为基线距离b,设定捕捉块8为物体点p在第一相机5下的坐标(xc,yc,zc),设定p
l
(ul,vl)为在目标点在左图像上的坐标,p2(u2,v2)为捕捉块8目标点在右图像上的坐标,经bouguet算法校正后vl=v2=v,且第一相机5以及第二相机6的焦距一致,即fl=f2=f,则相机坐标系下p点的三维坐标标由三角几何关系可以计算得式中:d=ul-u2为左右相机的视差,左光心c在图像上的成像点(c
x
,cy)。pw在世界坐标系的坐标与相机坐标系下的关系为:左相机成像面上的目标点只要在右成像面上找到其对应的匹配点,最终确定捕捉块8在世界坐标下的坐标(xw,yw,zw),通过确定捕捉块8的位置进而确定位置;
60.s402:首先测定楼层平层地坎1与电梯轿厢2平行状态下的第一压力数据,通过第一压力传感器20以及第二压力传感器21测量出电梯轿厢2运行过程中的第二压力数据,判断第二压力数据与第一压力数据是否相同,若不相同,在根据第二压力数据计算第二弹簧22的形变量,根据第二弹簧22的形变量得到楼层平层地坎1与电梯轿厢2地坎的高度差;
61.s403:根据对应接收红外线的圆形红外接收头27自身标号数确定楼层平层地坎1与电梯轿厢2地坎的高度差;
62.s5:数据处理模完成故障分析后,若出现电梯非平层开门故障,预警模块及时发出预警,电梯轿厢2内设置有语音播报喇叭,实现进行语音警报。
63.其中,故障识别系统还包括监管模块以及系统恢复模块,预警模块及时发出预警的同时,将电梯故障信号发送至监管模块,监管模块用于控制电梯运行,进而关闭电梯,将电梯固定在该楼层处,监管模块对故障电梯及时进行整修,确保故障电梯能够快速使用,提高电梯的使用效果。
64.其中,步骤s2中,电梯轿厢2上行的过程中,到达设定楼层后,在继续上行时,凸块24挤压按压块23,按压块23挤压第二弹簧22,对应的第二弹簧22上端挤压第二压力传感器21,当第二弹簧22到达极限状态下,凸块24使得第二弧形杆19通过转动管10在转轴9上旋
转,使得第二弧形杆19缩回第二安装槽内,电梯轿厢2下行的过程中,到达设定楼层后,在继续下行时,同理第一弧形杆18缩回第二安装槽内,电梯轿厢2行驶过后,在第二弹簧22的作用下,第一弧形杆18以及第二弧形杆19重新复位。
65.其中,预警模块同时进行预警语音播报,预警模块通过采集相机25检测到轿厢内有人员活动是发送指令给播放线程,通过语音喇叭播放响应的信息,有效提醒乘客,电梯故障,请勿使用。
66.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。