:
1.本发明涉及的是地震勘探中反射地震资料处理技术领域,具体涉及的是一种倾角域地震成像方法。
背景技术:
2.与常规偏移距域成像方法不同,倾角域偏移成像方法以地层倾角道集为基础,利用人工手段拾取地层倾角,构建全成像域的地层倾角场,然后将地层倾角场作为偏移参数参与偏移成像。对于倾角域偏移成像方法而言,地层倾角的精度决定了偏移方法孔径大小的精度,进而影响着最终的偏移成像质量。对于倾角域偏移成像方法中地层倾角的求取,目前行业内多通过地层倾角道集进行手工拾取,然而生成倾角道集会占用大量内存,方法应用具有局限性,另外利用地层倾角道集手工拾取地层倾角具有效率低、精度差等弊端。针对这些问题,业界尚未提出有效的解决方案。
技术实现要素:
3.本发明的目的是提供一种倾角域地震成像方法,这种倾角域地震成像方法用于解决现有倾角域成像方法在求取地层倾角时通过地层倾角道集进行人工拾取带来的效率低下、精度差以及局限性大等问题。
4.本发明解决其技术问题所采用的技术方案是:
5.步骤一、准备一套偏移距域成像方法生成的叠后偏移地震数据体,该数据体有m条主测线,n条联络测线,每条主测线上有n个cdp点,每条联络测线上有m个cdp点,每个地震道时间长度为t,让该数据体在时间域显示,对其进行低通滤波,保留主频以内的信号,将信噪比较低的高频部分去掉;
6.步骤二、计算主测线所有成像点对应的真实地层倾角x;
7.步骤三、计算联络测线所有成像点对应的真实地层倾角y;
8.步骤四、在偏移成像时,对于输入的每一道叠前地震数据,根据炮点、检波点与成像点的空间坐标,计算每个成像点在主测线方向的地层倾角大小,记为a
x
,计算每个成像点在联络测线方向的地层倾角大小,记为ay,然后与步骤二得到的该成像点的主测线真实地层倾角x、步骤三得到的该成像点的联络测线真实地层倾角y做比较,若同时满足a
x
《=x且ay《=y,则继续计算该成像点的走时与幅值,完成成像,否则对下一个成像点重复本步操作;
9.步骤五、完成所有成像点的计算,得到最终的地震成像剖面。
10.上述方案中步骤二计算主测线成像点对应的真实地层倾角x的方法:对于任意一条主测线e,对其上的第f个cdp而言,在时间深度t的成像点处,其中e为不大于m的正整数,f为不大于n的正整数,t为不大于t的正数,扫描主测线方向最小地层倾角和最大地层倾角之间的几个倾角所对应的相干值大小,用最小二乘方法拟合这些倾角值对应的相干值,φ代表主测线地层倾角大小,c
x
(e,f,t,φ)代表相干值大小,拟合曲线为二次曲线形态,具体表达式为:
11.c
x
(e,f,t,φ)=α3 α2φ α1φ212.α1,α2,α3为拟合系数,然后求该曲线c
x
(e,f,t,φ)关于φ的导数,当时对应的φ为成像点在该时间深度处主测线方向的真实地层倾角x。
13.上述方案中步骤三计算联络测线成像点对应的真实地层倾角y的方法:对于任意一条联络测线p,对其上的第q个cdp而言,在时间深度t的成像点处,其中p为不大于n的正整数,q为不大于m的正整数,t为不大于t的正数,扫描联络测线方向最小地层倾角和最大地层倾角之间的几个倾角所对应的相干值大小,用最小二乘方法拟合这些倾角值对应的相干值,η代表联络测线地层倾角大小,cy(p,q,t,η)代表相干值大小,拟合曲线为二次曲线形态,具体表达式为:
14.cy(p,q,t,η)=β3 β2η β1η215.β1,β2,β3为拟合系数,然后求该曲线cy(p,q,t,η)关于η的导数,当时对应的η为成像点在该时间深度处联络测线方向的真实地层倾角y。
16.上述方案步骤四中计算成像点在主测线方向的地层倾角及成像点在联络测线方向的地层倾角是这样实现的:对于输入的每一道叠前地震数据,定义激发点水平坐标为s,接收点水平坐标为g,方位角为θ,成像点坐标为(x,y,τ),成像点的偏移速度为vel
rms
;
17.定义如下变量,u1=s-x,u2=s g-2x,计算距离变量
18.w1=u
1 cosθ;w2=u1u2 2(vel
rms
)2;w3=u
2 cosθ;x为x轴横坐标,则则成像点在主测线方向的地层倾角a
x
为arctan[(u1 w5cosθ)/(vel
rms
τ)];式中:u1、u2、w1、w2、w3、w4、w5均为中间变量,无实义;
[0019]
定义如下变量,v1=g-y,v2=s g-2y,计算距离变量r1=v
1 cosθ;r2=v1v2 2(vel
rms
)2;r3=v
2 cosθ;
[0020]
y为y轴横坐标,则则成像点在联络测线方向的地层倾角ay为arctan[(v1 r5cosθ)/(vel
rms
τ)];式中:v1、v2、r1、r2、r3、r4、r5均为中间变量,无实义。
[0021]
本发明具有以下有益效果:
[0022]
1、本发明利用已有的偏移距域叠后偏移地震数据体计算主测线与联络测线的地层倾角,避免了现有倾角域成像方法在求取地层倾角时通过地层倾角道集进行人工拾取带来的效率低下、精度差以及局限性大等问题。
[0023]
2、本发明在偏移成像时,首先计算输入的每道叠前地震数据在成像点处主测线方向地层倾角与联络测线方向地层倾角,然后分别与事先计算的该点在主测线与联络侧线地层倾角进行大小对比,进而确定成像区域,提高了地震成像的品质。
[0024]
3、与常规方法相比,本发明利用已有的地震数据体,通过一套高精度快速算法,生成地层倾角场,整个过程内存消耗小,没有人工参与,具有高效率高精度的优点。
附图说明
[0025]
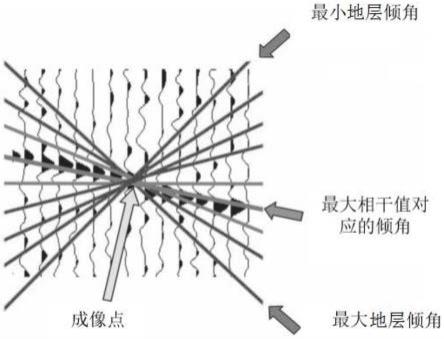
图1主测线或联络侧线方向成像点的扫描倾角与相干情况示意图。
[0026]
图2偏移距域主测线方向叠后偏移地震数据剖面,a井为过地震剖面的斜井。
[0027]
图3图2地震剖面对应的地层倾角剖面图。
[0028]
图4常规偏移方法生成的地震成像剖面。
[0029]
图5采用本发明方法后得到的地震成像剖面。
具体实施方式
[0030]
下面结合附图对本发明做进一步的说明:
[0031]
这种倾角域成像方法,以东部油田某地震资料为例,具体包括以下步骤:
[0032]
1、对叠前地震数据进行常规压制噪声处理,该数据采样间隔为2ms,地震信号的记录时长是5000ms,cdp间距是25m,最小偏移距是100m,最大偏移距是5400m,偏移距间隔是50m。
[0033]
步骤一、准备一套偏移距域成像方法生成的叠后偏移地震数据体,该数据体有500条主测线,1000条联络线,每条主测线上有1000个cdp点(common depth point,共深度点),每条联络测线上有500个cdp点,每个地震道时间长度为3.5s,让该数据体在时间域显示,对其进行低通滤波,保留主频以内的信号,将信噪比较低的高频部分去掉。
[0034]
步骤二、对每条主测线上所有的成像点计算真实地层倾角,原理如图1所示,当相干值最大时,对应的倾角便为地层的倾角,主测线地震剖面如图3所示,图3右侧标尺表示的是地震剖面灰度与地震复制之间的关系。
[0035]
计算主测线成像点对应的真实地层倾角x的方法:对于任意一条主测线e,对其上的第f个cdp而言,在时间深度t的成像点处,其中e为不大于m的正整数,f为不大于n的正整数,t为不大于t的正数,扫描主测线方向最小地层倾角和最大地层倾角之间的几个倾角所对应的相干值大小,用最小二乘方法拟合这些倾角值对应的相干值,φ代表主测线地层倾角大小,c
x
(e,f,t,φ)代表相干值大小,拟合曲线为二次曲线形态,具体表达式为:
[0036]cx
(e,f,t,φ)=α3 α2φ α1φ2[0037]
α1,α2,α3为拟合系数,然后求该曲线c
x
(e,f,t,φ)关于φ的导数,当时对应的φ为成像点在该时间深度处主测线方向的真实地层倾角x。
[0038]
步骤三、计算每条联络测线上所有的成像点对应的真实地层倾角。
[0039]
计算联络测线成像点对应的真实地层倾角y的方法:对于任意一条联络测线p,对其上的第q个cdp而言,在时间深度t的成像点处,其中p为不大于n的正整数,q为不大于m的正整数,t为不大于t的正数,扫描联络测线方向最小地层倾角和最大地层倾角之间的几个倾角所对应的相干值大小,用最小二乘方法拟合这些倾角值对应的相干值,η代表联络测线地层倾角大小,cy(p,q,t,η)代表相干值大小,拟合曲线为二次曲线形态,具体表达式为:
[0040]cy
(p,q,t,η)=β3 β2η β1η2[0041]
β1,β2,β3为拟合系数,然后求该曲线cy(p,q,t,η)关于η的导数,当时对应的η为成像点在该时间深度处联络测线方向的真实地层倾角y。
[0042]
步骤四、在偏移成像时,对于输入的每一道叠前地震数据,根据炮点、检波点与成像点的空间坐标,计算每个成像点在主测线与联络测线方向的地层倾角大小,分别记为a
x
与ay,并与该成像点事先计算好的主测线与联络测线地层倾角做比较,若同时满足a
x
《=x且ay
《=y,则继续计算该成像点的走时与幅值,完成成像,否则对下一个成像点重复本步操作。
[0043]
计算成像点在主测线方向的地层倾角及成像点在联络测线方向的地层倾角是这样实现的:对于输入的每一道叠前地震数据,定义激发点水平坐标为s,接收点水平坐标为g,方位角为θ,成像点坐标为(x,y,τ),成像点的偏移速度为vel
rms
;
[0044]
定义如下变量,u1=s-x,u2=s g-2x,计算距离变量w1=u
1 cosθ;w2=u1u2 2(vel
rms
)2;w3=u
2 cosθ;x为x轴横坐标,则则成像点在主测线方向的地层倾角a
x
为arctan[(u1 w5cosθ)/(vel
rms
τ)];式中:u1、u2、w1、w2、w3、w4、w5均为中间变量,无实义;
[0045]
定义如下变量,v1=g-y,v2=s g-2y,计算距离变量r1=v
1 cosθ;r2=v1v2 2(vel
rms
)2;r3=v
2 cosθ;
[0046]
y为y轴横坐标,则则成像点在联络测线方向的地层倾角ay为arctan[(v1 r5cosθ)/(vel
rms
τ)];式中:v1、v2、r1、r2、r3、r4、r5均为中间变量,无实义。
[0047]
步骤五、完成所有成像点的计算,得到最终的地震成像剖面。
[0048]
图1是主测线或联络侧线方向成像点的扫描倾角与相干情况示意图,当相干值最大时,对应的倾角便为地层的倾角。图2是偏移距域主测线方向叠后偏移地震数据剖面,a井为过地震剖面的斜井。图3是图2地震剖面对应的地层倾角剖面图。图4是常规偏移方法生成的地震成像剖面。图5是采用本发明方法后得到的地震成像剖面。可以看出图4所示的常规地震成像剖面由于采用了统一的成像孔径,成像精度不足,地震剖面信噪比较低。图5采用了本文方法生成的地层倾角作为偏移参数,获得的地震成像剖面信噪比高,地震成像品质有一定改善。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。