1.本发明属于深空探测标定技术领域,具体涉及深空测距上下行设备零值的标定与分离方法。
背景技术:
2.深空测距获取的测量值为距离和,其上下行设备零值难以分离。通常方法是进行单站双向测距,扣除探测器转发时延和大气折射时延后,标定距离和系统误差,简单折半得到上下行设备零值。零值均分法在进行收发异站测距时,会引入数十米到百米的误差,这是不可忽略的。
技术实现要素:
3.本发明的目的是提供深空测距上下行设备零值的标定与分离方法,建立零值组合的非齐次线性方程组,通过解方程获得准确的上下行设备零值。
4.本发明所采用的技术方案是,深空测距上下行设备零值的标定与分离方法,其特征在于,设待标定深空测量站为a站和b站,c站辅助标定站,l为月球表面着陆器,通过以下步骤对a站、b站进行上下行设备零值标定与分离;
5.步骤1,选取合作式月球表面着陆器l作为标定靶目标,将a站作为主站进行观测;从时间t0到t1,使用a站发送上行信号,a站、b站、c站均接收月球表面着陆器转发的下行信号,获取三组距离和数据ρ
aa
(t),ρ
ab
(t),ρ
ac
(t);从时间t1到t2,使用b站发送上行信号,a、b、c三站接收月球表面着陆器转发的下行信号,获取三组距离和数据ρ
bb
(t),ρ
ba
(t),ρ
bc
(t);
6.步骤2,对步骤1中的距离和数据分别进行修正,得到修正后的距离和实测数据ρ
′
aa
,ρ
′
bb
,ρ
′
ab
,ρ
′
ba
,ρ
′
ac
,ρ
′
bc
;
7.步骤3,使用光行时回溯迭代法,求解距离和理论值;
8.步骤4,将步骤2和3的结果对应相减,得到误差标定结果;将误差结果序列对时间求平均,得到系统偏差;
9.步骤5,根据系统偏差将测站a、b的上下行设备零值进行精确的标定和分离。
10.本发明的特点还在于,
11.步骤2中,具体为:
12.步骤2.1,对步骤1得到的六组距离和数据扣除地面测试获得的等效附加距离,完成转发器时延修正;
13.步骤2.2,测量信号穿过大气,受到大气折射影响,传播路径增加引入时延;通过gnss双频接收机或大气折射经验模型予以修正;
14.步骤2.3,利用高精度共视接收机,通过共视gnss卫星传递收发站站间钟差,钟差折算成距离误差,在测量数据中予以扣除。
15.步骤3中,具体为:以a站上行b站下行为例;
16.步骤3.1,以数据接收时刻t∈[t1,t2],着陆器r
l
(t)和下行测站位置rb(t)为初始
值,进行光行时迭代,求解着陆器转发时刻t-τ1着陆器精确位置r
l
(t-τ1),获得理论下行距离
[0017]
τ1为下行光行时,即信号在t-τ1时刻,从着陆器出发,在t时刻,到达下行测站;
[0018]
步骤3.2,以着陆器转发时刻t-τ1,着陆器r
l
(t-τ1)和上行测站位置ra(t-τ1)为初始值,进行光行时迭,求解上行测站发送时刻t-τ
1-τ2上行测站精确位置ra(t-τ
1-τ2),获得理论上行距离τ2为下行光行时;
[0019]
步骤3.3,将所得结果相加,得到距离和的理论值同样方法获得
[0020]
步骤4中,系统偏差表示为:
[0021][0022]
步骤5中,系统偏差等于各组合上下行设备零值之和,六组数据组成一个非齐次线性方程组:
[0023][0024]
获得最小二乘解:
[0025]
[0026]
至此,测站a、b的上下行设备零值得到精确的标定和分离。
[0027]
本发明的有益效果是:通过辅助接收站增加观测冗余,建立零值组合的非齐次线性方程组,通过解方程获得准确的上下行设备零值。本发明方法相比于现有的比零值均分法,更准确的反映设备上下行零值情况,在深空异站收发测量中有明显的效益。
附图说明
[0028]
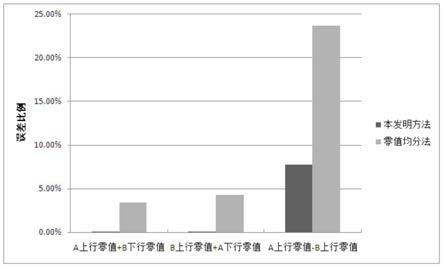
图1是本发明方法与零值均分法的误差分析图。
具体实施方式
[0029]
下面结合附图和具体实施方式对本发明进行详细说明。
[0030]
本发明深空测距上下行设备零值的标定与分离方法,具体按照以下步骤进行实施:
[0031]
设待标定深空测量站为a站和b站,c站辅助标定站,l为月球表面着陆器,通过以下步骤对a站、b站进行上下行设备零值标定与分离;
[0032]
步骤1,选取合作式月球表面着陆器l作为标定靶目标,将a站作为主站进行观测,从时间t0到t1,使用a站发送上行信号,a站、b站、c站均接收月球表面着陆器转发的下行信号,获取三组距离和数据ρ
aa
(t),ρ
ab
(t),ρ
ac
(t),t=t0,t0 δt,t0 2δt,
…
,t1,δt为测量间隔;
[0033]
从时间t1到t2,使用b站发送上行信号,a、b、c三站接收月球表面着陆器转发的下行信号,获取三组距离和数据ρ
bb
(t),ρ
ba
(t),ρ
bc
(t),t=t1,t1 δt,t1 2δt,
…
,t2,δt为测量间隔。
[0034]
步骤2,对步骤1中的距离和数据分别进行修正,具体为:
[0035]
步骤2.1,着陆器、转发器接收和转发信号,会引入一个等效附加距离。该距离通过地面测试获得,通常为一常值,对上面得到的六组距离和数据扣除地面测试获得的等效附加距离,完成转发器时延修正;
[0036]
步骤2.2,测量信号穿过大气,受到大气折射影响,传播路径增加引入时延。可通过gnss双频接收机或大气折射经验模型予以修正;
[0037]
步骤2.3,利用高精度共视接收机,通过共视gnss卫星传递收发站站间钟差,钟差折算成距离误差,在测量数据中予以扣除;
[0038]
步骤1中的到的六组距离和数据,减去步骤2中三个步骤计算的修正量,得到修正后的距离和实测数据ρ
′
aa
,ρ
′
bb
,ρ
′
ab
,ρ
′
ba
,ρ
′
ac
,ρ
′
bc
;
[0039]
步骤3,使用光行时回溯迭代法,求解距离和理论值;以a站上行b站下行为例;
[0040]
步骤3.1,以数据接收时刻t∈[t1,t2],着陆器r
l
(t)和下行测站位置rb(t)为初始值,进行光行时迭代,求解着陆器转发时刻t-τ1着陆器精确位置r
l
(t-τ1),获得理论下行距离
[0041]
τ1为下行光行时,即信号在t-τ1时刻,从着陆器出发,在t时刻,到达下行测站;
[0042]
步骤3.2,以着陆器转发时刻t-τ1,着陆器r
l
(t-τ1)和上行测站位置ra(t-τ1)为初始值,进行光行时迭,求解上行测站发送时刻t-τ
1-τ2上行测站精确位置ra(t-τ
1-τ2),获得理论
上行距离τ2为下行光行时;
[0043]
步骤3.3,将所得结果相加,得到距离和的理论值同样方法获得
[0044]
步骤4,将步骤2和3的结果对应相减,得到误差标定结果;将误差结果序列对时间求平均,得到系统偏差;
[0045]
在着陆器位置精确,测量误差修正充分的情况下,标定结果预期呈仅含系统偏差的白噪声分布,噪声水平与设备热噪声相当,而系统偏差即为设备零值。系统偏差表示为:
[0046][0047]
步骤5,将测站a、b的上下行设备零值进行精确的标定和分离;
[0048]
步骤4中系统偏差等于各组合上下行设备零值之和,六组数据组成一个非齐次线性方程组:
[0049][0050]
式中up表示上行零值,down表示下行零值,脚标表示测站。该方程组含有6个方程5个未知数,是一个超定方程,使用矩阵左除等方法可获得最小二乘解:
[0051]
[0052]
至此,测站a、b的上下行设备零值得到精确的标定和分离。
[0053]
实施例
[0054]
某次标定试验的示例如下。距离和系统偏差为:
[0055]
bias
aa
=944.653
[0056]
bias
bb
=710.409
[0057]
bias
ab
=796.521
[0058]
bias
ba
=860.759
[0059]
bias
ac
=743.625
[0060]
bias
bc
=651.532
[0061]
通过求解得到测站a、b上下行设备零值,与零值均分法对比如下:
[0062]
表1上下行零值分离比较
[0063][0064]
可以看出,零值均分法存在较大误差,本发明方法可以更准确的反映设备上下行零值情况,为深空异站收发测量奠定了基础。
[0065]
如图1所示,选取三个比较项目,前两个项目本发明方法误差均小于0.1%,小于零值均分法3%-4%的误差,第三个项目误差约8%,远优于零值均分法24%的误差。可以看出,本发明方法可以更准确的反映设备上下行零值情况,为深空异站收发测量奠定了基础。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。