1.本实用新型涉及移动隔离设施技术领域,具体为一种自移式智能隔离桩。
背景技术:
2.现有的道路交通管理过程中,隔离设施应用于道路中央、路侧以及管理、防护等区域隔离围挡,主要用于分隔多股车流机动车、机动车与非机动车以及防护区域隔离等等用途。现有技术中,大多数隔离装置都是采用固定方式设置,仅能依靠人工方式拆卸或移动。也有技术人员研究了可以自动移动的隔离装置,如:申请号为201821931772.7的专利,公开了一种感应式自动化移动护栏,通过升降控制模块控制行走轮在底座箱升降,从而实现移动和固定两种状态的切换。申请号为202022675949.5的专利公开了一种潮汐机器人远程控制系统,可通过远程控制对潮汐车道的通行方向进行自动切换。但这两个专利的技术方案中的护栏形式相对固定,灵活性不足,应用场景单一。
技术实现要素:
3.为了解决现有技术中的隔离装置应用场景单一的问题,本实用新型提供一种自移式智能隔离桩,其在可以自动化移动的同时,可以灵活的应用在各种场景中。
4.本实用新型的结构是这样的:一种自移式智能隔离桩,其包括:隔离桩本体、底座,安装在所述底座的内部的控制模块、驱动模块、通信模块,安装在所述底座底部的万向轮;所述驱动模块通过传动结构连接所述万向轮的驱动轴,所述通信模块、所述驱动模块分别电连接所述控制模块;
5.其特征在于:所述隔离桩本体为柱状结构,所述底座安装在所述隔离桩本体底部;其还包括警示结构,所述警示结构设置于所述隔离桩本体上;
6.所述警示结构包括:反光标识、声光警示模块、感知模块;所述反光标识贴在所述隔离桩本体的外壁;所述声光警示模块、所述感知模块设置于所述隔离桩本体上部或顶部;所述声光警示模块包括:发光灯组、功放装置;所述声光警示模块电连接所述感知模块。
7.其进一步特征在于:
8.其还包括定位模块,所述定位模块设置于所述底座内部,电连接所述控制模块;所述定位模块的定位模式包括:gps、北斗、蓝牙、uwb;
9.所述感知模块的感知方式包括:视频、射频、微波、热成像、激光;
10.其还包括供电模块:所述供电模块电连接所述警示结构、所述定位模块、所述通信模块、所述驱动模块、所述控制模块,为其他模块供电;所述供电模块支持的供电模式包括:有线、无线和太阳能;
11.所述控制模块通过rs485通信电路与所述通信模块、所述供电模块进行控制信令传输;所述控制模块通过can总线与所述驱动模块进行控制信令传输;
12.其还包括手槽,所述手槽设置于所述隔离桩本体的外侧壁;
13.其还包括万向轮锁定结构,所述万向轮锁定结构:包括设置在所述传动结构上的
锁孔、固定在所述底座上的轮锁;所述轮锁对准所述锁孔,通过前后移动的直线推动结构,进出所述锁孔。
14.本实用新型提供的一种自移式智能隔离桩,基于柱状的隔离桩本体可以灵活的移动到各种位置,通过设置于隔离桩本体之上的警示结构,对车辆、行人进行警示提醒,不受地形、道路形状变化的限制;在此基础之上,当多个隔离桩一起共同使用的时候,可以实现各种形状的隔离装置,适用于各种应用场景;与现有的隔离装置相比,本实用新型的自移动式隔离桩可以更灵活的适用于各种不同的场景下,满足更多的交通管理需求。
附图说明
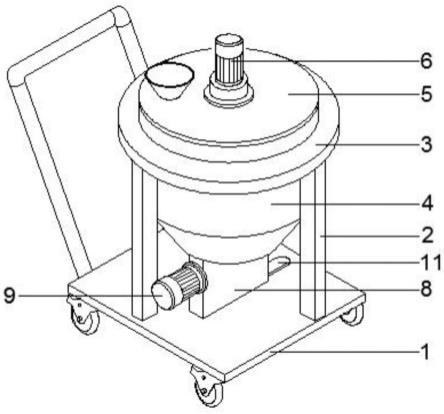
15.图1为本实用新型的自移式智能隔离桩的结构示意图;
16.图2为自移式智能隔离桩的万向轮连接部分的结构示意图;
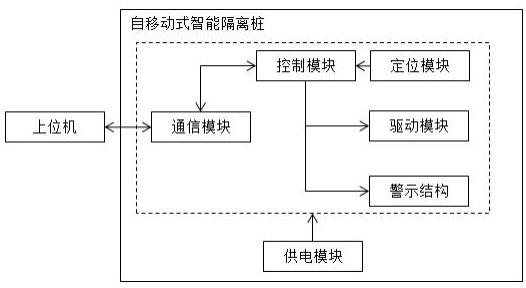
17.图3为自移式智能隔离桩控制系统结构示意图;
18.图4为自移式智能隔离桩的应用实施例1;
19.图5为自移式智能隔离桩的应用实施例2
20.图6为自移式智能隔离桩的应用实施例3;
21.图7为万向轮锁定结构的结构示意图。
具体实施方式
22.如图1~图4所示,本实用新型一种自移式智能隔离桩,其包括:隔离桩本体1、底座2、安装在底座2底部的万向轮3。隔离桩本体1为柱状结构,底座2安装在隔离桩本体1底部;其还包括警示结构,警示结构设置于隔离桩本体上。本实用新型中的隔离桩本体1为柱状,每个隔离桩通过隔离桩的控制系统单独驱动,因为隔离桩本体1在横向占用空间很小,可以很灵活的设置在不同的街道位置,进而通过多个隔离桩的组合应用,可以非常灵活的按照街道的变化、按照实际的需要构成各种需要的隔离形状,如图4、图5、图6所示,多个自移动式隔离桩组合应用后,可以构成的隔离装置形状包括:单排队列式、全范围包围式、半包围式。
23.具体应用的时候,自移式智能隔离桩的移动,可以通过现有技术中的智能护栏自移动控制技术实现。多组隔离桩联合移动也可通过各自通信模块实现编组活动,纳入统一编组的隔离桩通过通信模块进行信息交互,也可以自动或人工选定其中一个隔离桩的通信模块为主通信模块,主通信模块主要负责接收上位信令、组内信令传达和内容逻辑分组,主通信模块出现故障后其它通信模块将自动产生新的主通信模块,并将故障信息自动上传中心,交互信息传达至各隔离桩后由各自控制模块进行信令发出。具体通信方式基于现有的编程技术实现即可。
24.本实用新型中的警示结构包括:反光标识4,反光标识4贴在隔离桩本体1的外壁,对车辆和行人起到警示作用。为了提供更强的警示信息,隔离桩的警示结构还包括:设置于隔离桩本体1上部或顶部的声光警示模块5、感知模块(图中未标记),将声光警示模块5设置于隔离桩本体1的顶部或者上部,可确保形容或者车辆更容易的看到警示信息。声光警示模块5包括:发光灯组、功放装置,发光灯组通过闪烁或恒亮模式进行提示,功放装置播放预设的声音警示信息或者接收从控制模块实时传递过来的警示内容。
25.声光警示模块5电连接感知模块,感知模块的感知方式包括:视频、射频、微波、热成像、激光;感知模块基于现有的技术实现对接近的物体、行人的无线感知功能,当检测到有物体、车辆、行人接近的时候,通过声光报警模块5发出警告信息。确保本实用新型的隔离桩能够提供更好的隔离效果。具体实施时,当多个隔离桩共同编组使用的时候,各个隔离桩的声光警示模块5按照各自控制模块发出的指令实施操作,但由主通信模块同步频率和显示方式。
26.隔离桩的控制系统安装在底座2的内部,如图3所示,隔离桩的控制系统包括:控制模块、驱动模块、通信模块;驱动模块通过传动结构连接万向轮3的驱动轴32,通信模块、驱动模块分别电连接控制模块;控制模块通过rs485通信电路与通信模块、供电模块进行控制信令传输;控制模块通过can总线与驱动模块进行控制信令传输。控制模块通过通信模块,基于现有的有线或者线通信技术与上位机实现通信。
27.具体应用时,控制模块通过通信模块与上位机之间的进行通信交互接收上位机发出的移动命令,实现在不同情境下的隔离桩移动。本实用新型中的上位机包括但不限于遥控装置、车联网边缘节点、信号机、中心系统/平台等,通信内容主要包括接收控制信令、设施报警、数据信息及日志上传、用户管理等。
28.供电模块电连接警示结构、定位模块、通信模块、驱动模块、控制模块;供电模块支持的供电模式包括:有线、无线和太阳能。具体应用的时候,隔离桩内的各个模块可根据自身电量情况自动发出充电请求;当多个隔离桩共同编组使用的时候,可按照主通信模块的通信信息要求进行编组集中充电。
29.定位模块设置于底座2内部,电连接控制模块;定位模块的定位模式包括:gps、北斗、蓝牙、uwb;具体应用时,可根据控制模块指令给定的定位信息实现设施准确移位。单个使用时,每个隔离桩通过定位模块实现位置信息的确定与校正。编组后,按照预案进行指定排列形式移动时,组内各隔离桩通过通信模块实现信息交互,实现位置信息的确定与校正。
30.本实用新型中,基于驱动模块驱动万向轮3实现移动。其中,驱动模块中包括驱动电机和传动结构,传动结构包括链接杆37、驱动齿轮模块36、支撑支架32,链接杆37一端连接输出电机(图中未标记)输出轴,另一端连接驱动齿轮模块36,驱动齿轮模块36连接万向轮3的轮轴35的一端,轮轴35的另一端固定连接支撑支架32,通过支撑支架32固定于底座2;万向轮的传动结构和驱动模块对万向轮3的驱动操作,如图由驱动电机通过驱动链接杆37和驱动齿轮模块36,驱动万向轮3转动,具体细节基于现有技术实现即可。
31.同时为了确保移动隔离立柱1的定位更准确和稳定,本实用新型中的隔离立柱1还设置了万向轮锁定结构。万向轮锁定结构包括设置在支撑支架32上的锁孔33、固定在底座2上的轮锁34,轮锁34对准支撑支架32上的锁孔33,轮锁34通过前后移动的直线推动结构,如电动推杆等结构(图中未标出)接收控制模块发出的命令,实现在锁孔33中的进出,实现对万向轮3的锁定和解锁动作。
32.具体实施时,万向轮3在水平面上可任意方向定向滑动,方向移动时锁定方向不再偏移。轮锁34根据接受的信令切换锁死和开锁状态,在万向轮3移动到预置位或指令要求位置后对其自动锁死。万向轮3的移动速度可根据指令要求通过控制模块进行调节,具体实现方式是:底座2之下安装4个万向轮3,以移动方向为前方,4个滑轮中靠后的两个轮子的轮锁进入到锁孔中锁住轮子保持固定不转动,靠前的两个轮子不锁可任意移动,后轮驱动使设
施移动,通过后轮的速度差实现转弯。
33.例如,如图4中,四个万向轮包括:第一前方轮3-a2、第二前方轮3-a4、第一后方轮3-a1、第二后方轮3-a3;实现转弯操作的时候,第一前方轮3-a2、第二前方轮3-a4在方位校正后锁死,两个后方轮不锁,根据转弯的方向分别调整两个轮子的速度。当前进时第一后方轮3-a1、第二后方轮3-a3同速驱动,需要转弯的时候,控制模块先计算需要转弯的速度,然后对第一后方轮3-a1、第二后方轮3-a3发送速度调整命令,通过速度差实现转弯;当需要左转时,将第一后方轮3-a1速度调整到高于第二后方轮3-a3;通过将第二后方轮3-a3速度调整到高于第一后方轮3-a1的速度,则实现右转弯。
34.手槽6设置于隔离桩本体2的外侧壁,确保自移式智能隔离桩可以被方便的实现人工搬动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。