技术特征:
1.一种升降装置,包括:第一板状构件,设置在配置被升降物的一侧;第二板状构件,配置在所述第一板状构件的下方,具有第一边,所述第一边与所述第一板状构件可转动地连接;第一膨胀收缩袋,配置在所述第一板状构件与所述第二板状构件之间,能够通过气体的供气及排气而膨胀及收缩;第三板状构件,配置在所述第二板状构件的下方,在所述第二板状构件的与所述第一边不同的第二边,所述第三板状构件与所述第二板状构件可转动地连接;以及第二膨胀收缩袋,配置在所述第二板状构件与所述第三板状构件之间,能够通过气体的供气及排气而膨胀及收缩;且所述第一板状构件、所述第一膨胀收缩袋、所述第二板状构件、所述第二膨胀收缩袋及所述第三板状构件以在俯视下重叠的方式配置,所述升降装置还包括:拍摄部,拍摄配置在所述第一板状构件的上方的所述被升降物;以及控制部,以如下方式构成:对由所述拍摄部所拍摄的图像进行图像处理,算出所述被升降物的倾斜角度,且根据所述第一板状构件的倾斜角度,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的控制。2.根据权利要求1所述的升降装置,其中所述控制部以如下方式构成:根据所述第一板状构件及所述第二板状构件的倾斜角度,算出所述第一板状构件的高度位置,并且根据所述第一板状构件的倾斜角度及已算出的所述第一板状构件的高度位置,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的控制。3.根据权利要求2所述的升降装置,还包括:第一检测部,检测所述第一板状构件的倾斜角度;以及第二检测部,检测所述第二板状构件的倾斜角度;且所述控制部以如下方式构成:根据由所述第一检测部及所述第二检测部所检测的所述第一板状构件的倾斜角度及所述第二板状构件的倾斜角度,算出所述第一板状构件的高度位置,并且根据所述第一板状构件的倾斜角度及已算出的所述第一板状构件的高度位置,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的控制。4.根据权利要求1至3中任一项所述的升降装置,还包括:泵,进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气;以及流路切换部,切换用于进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的流路;且所述控制部以如下方式构成:控制所述泵及所述流路切换部,以根据所述第一板状构件的倾斜角度,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气、及流路的切换。5.根据权利要求1至3中任一项所述的升降装置,还包括:
第一压力传感器,测定所述第一膨胀收缩袋内的压力;以及第二压力传感器,测定所述第二膨胀收缩袋内的压力;且所述控制部以进行如下的控制的方式构成:当由所述第一压力传感器所测定的所述第一膨胀收缩袋内的压力已超过第一个规定的上限值时,使朝所述第一膨胀收缩袋的气体的供气停止,并且当由所述第二压力传感器所测定的所述第二膨胀收缩袋内的压力已超过第二个规定的上限值时,使朝所述第二膨胀收缩袋的气体的供气停止。6.一种升降装置的操作方法,用于操作升降装置,所述升降装置包括:第一板状构件,设置在配置被升降物的一侧;第二板状构件,配置在所述第一板状构件的下方,具有第一边,所述第一边与所述第一板状构件可转动地连接;第一膨胀收缩袋,配置在所述第一板状构件与所述第二板状构件之间,能够通过气体的供气及排气而膨胀及收缩;第三板状构件,配置在所述第二板状构件的下方,在所述第二板状构件的与所述第一边不同的第二边,所述第三板状构件与所述第二板状构件可转动地连接;以及第二膨胀收缩袋,配置在所述第二板状构件与所述第三板状构件之间,能够通过气体的供气及排气而膨胀及收缩;且所述第一板状构件、所述第一膨胀收缩袋、所述第二板状构件、所述第二膨胀收缩袋及所述第三板状构件以在俯视下重叠的方式配置,所述升降装置的操作方法包括:拍摄配置在所述第一板状构件的上方的所述被升降物;以及对所拍摄的图像进行图像处理,算出所述被升降物的倾斜角度,且根据所述第一板状构件的倾斜角度,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的控制。7.根据权利要求6所述的升降装置的操作方法,还包括:根据所述第一板状构件及所述第二板状构件的倾斜角度,算出所述第一板状构件的高度位置,并且根据所述第一板状构件的倾斜角度及已算出的所述第一板状构件的高度位置,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的控制。8.根据权利要求7所述的升降装置的操作方法,还包括:检测所述第一板状构件的倾斜角度;检测所述第二板状构件的倾斜角度;以及根据所检测的所述第一板状构件的倾斜角度及所述第二板状构件的倾斜角度,算出所述第一板状构件的高度位置,并且根据所述第一板状构件的倾斜角度及已算出的所述第一板状构件的高度位置,以使所述第一板状构件上下移动或倾斜的方式进行朝所述第一膨胀收缩袋及所述第二膨胀收缩袋的气体的供气及排气的控制。9.根据权利要求6至8中任一项所述的升降装置的操作方法,还包括:根据所述第一板状构件的倾斜角度,以使所述第一板状构件上下移动或倾斜的方式进行流路的切换。10.根据权利要求6至8中任一项所述的升降装置的操作方法,还包括:
测定所述第一膨胀收缩袋内的压力;测定所述第二膨胀收缩袋内的压力;以及当所测定的所述第一膨胀收缩袋内的压力已超过第一个规定的上限值时,使朝所述第一膨胀收缩袋的气体的供气停止,并且当所测定的所述第二膨胀收缩袋内的压力已超过第二个规定的上限值时,使朝所述第二膨胀收缩袋的气体的供气停止。
技术总结
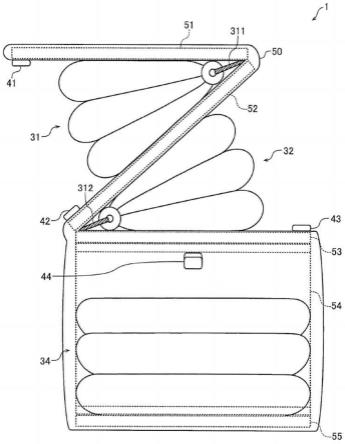
本发明提供一种可抑制可动部的上下方向的配置空间变大的升降装置以及升降装置的操作方法。所述升降装置(100)包括:第一板状构件(51);第二板状构件(52),以第一板状构件(51)可转动的方式连接;第一膨胀收缩袋(31),配置在第一板状构件(51)与第二板状构件(52)之间,可通过气体的供气及排气而膨胀及收缩;第三板状构件(53),以第二板状构件(52)可转动的方式连接;第二膨胀收缩袋,配置在第二板状构件(52)与第三板状构件(53)之间,可通过气体的供气及排气而膨胀及收缩;且第一板状构件(51)、第一膨胀收缩袋(31)、第二板状构件(52)、第二膨胀收缩袋(32)及第三板状构件(53)以在俯视下重叠的方式配置。下重叠的方式配置。下重叠的方式配置。
技术研发人员:若林尚之 田中史记 杉本润
受保护的技术使用者:船井电机株式会社
技术研发日:2020.02.26
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。