1.本实用新型涉及机械技术领域,具体涉及一种机器人打磨头智能更换装置。
背景技术:
2.防弹衣中一般设置有防弹内衬,防弹内衬为了贴合人体胸部的形状,需要对其打磨,以实现其表面的弧度,现有的打磨机构在打磨的时候,由于刀具打磨的损耗较大,难以实现全部的自动化换刀具。
技术实现要素:
3.为解决上述技术问题,本实用新型的目的是提供一种能够自动化对打磨头进行更换的装置。
4.本实用新型的技术方案如下:
5.一种机器人打磨头智能更换装置,其特征在于:包括:
6.机器人机构(1),其端部连接有打磨机构;换料装置(3),位于所述机器人机构(1)的一侧,和所述机器人机构(1)相互配合用于更换所述机器人机构(1)上的打磨头(108);
7.所述换料装置(3)包括框架(31),设置到所述框架(31)上的放料机构(32)、换料机构(33);
8.其中所述放料机构(32)包括设置到所述框架(31)上部的下安装板(322),所述下安装板(322)通过多个支杆(324)连接有上安装板(323),所述下安装板(322)和上安装板(323)之间设置有料筒(325),所述料筒(325)内设置有堆叠打磨头(100),所述框架(31)的底部设置有顶起气缸(321),所述顶起气缸(321)的驱动端位于所述料筒(325)底部;
9.所述换料机构(33)包括设置到所述框架(31)上部的第一气缸(331),所述第一气缸(331)的驱动端连接有水平状态的气缸移动板(332),所述气缸移动板(332)的两端分别连接有第一移动板(333)和第二移动板(334),所述第一移动板(333)上设置有第二气缸(335),所述第二气缸(335)的驱动端连接有压件(336),所述压件(336)的端部中间设置有缺口(3362),所述缺口(3362)两侧均设置有锲形头(3361)。
10.进一步的,所述第一气缸(331)的后部设置有检测箱(337),检测箱(337)上部设置有检测口内部设置有第二激光传感器(338),所述检测箱(337)侧面设置有供所述第二移动板(334)进入的开口,所述第二移动板(334)进入所述开口后遮挡所述检测口。
11.进一步的,所述框架(31)上还设置有废料槽(34)。
12.进一步的,所述机器人机构(1)包括多轴机器人(101),连接到所述多轴机器人(101)驱动端的打磨机构,所述打磨机构包括连接所述多轴机器人(101)的六维力传感器(102),所述六维力传感器(102)下部连接有底部支架(103),所述底部支架(103)一侧连接有主轴安装板(104),所述主轴安装板(104)上设置有电主轴(105),所述电主轴(105)两侧设置有冲洗头(106),所述电主轴(105)的驱动端连接有连接头(107),所述连接头(107)连接有打磨头(108)。
13.进一步的,所述连接头(107)上设置有公魔术贴,所述打磨头(108)上设置有母魔术贴。
14.进一步的,所述电主轴(105)的侧面还设置有第一激光传感器(109)。
15.进一步的,所述料筒(325)上还设置有观察用观察口(326)。
16.借由上述方案,本实用新型至少具有以下优点:
17.本装置能够通过换料装置配合机器人实现对打磨头的更换,且能够对更换的打磨头进行位置检测。
18.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
19.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某个实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
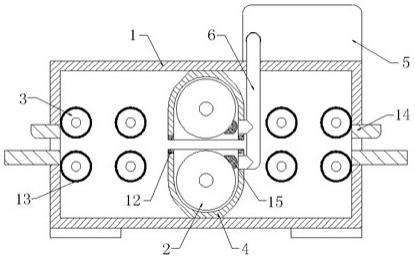
20.图1是本实用新型的结构示意图;
21.图2是本实用新型机器人机构的结构示意图;
22.图3是本实用新型换料装置结构示意图一;
23.图4是本实用新型换料装置结构示意图二;
24.图5是本实用新型换料装置结构示意图三;
25.图中:
26.100-堆叠打磨头;
27.1-机器人机构;101-多轴机器人;102-六维力传感器;103-底部支架;104-主轴安装板;105-电主轴;106-冲洗头;107-连接头;108-打磨头;109-第一激光传感器(摸头到工件的距离);
28.3-换料装置;31-框架;32-放料机构;321-顶起气缸;322-下安装板;323-上安装板;324-支杆;325-料筒;326-观察口;33-换料机构;331-第一气缸;332-气缸移动板;333-第一移动板;334-第二移动板;335-第二气缸;336-压件;3361-锲形头;3362-缺口;337-检测箱;338-第二激光传感器;34-废料槽。
具体实施方式
29.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
30.参见图1-图5,本实用新型一较佳实施例的一种机器人打磨头智能更换装置,包括:
31.机器人机构1,其端部连接有打磨机构,机器人机构1包括多轴机器人101,连接到多轴机器人101驱动端的打磨机构,打磨机构包括连接多轴机器人101的六维力传感器102,六维力传感器102下部连接有底部支架103,底部支架103一侧连接有主轴安装板104,主轴
安装板104上设置有电主轴105,电主轴105两侧设置有冲洗头106,电主轴105的驱动端连接有连接头107,连接头107连接有打磨头108。连接头107上设置有公魔术贴,打磨头108上设置有母魔术贴。电主轴105的侧面还设置有第一激光传感器109。多轴机器人101是起到移动的作用,能够在多个维度进行移动,方便端部的电主轴105进行移动。六维力传感器102能够精准反馈电主轴105的打磨力道。电主轴105两侧的冲洗头106一是可以起到降温的作用,而是可以将打磨的粉尘冲洗走。连接头107和打磨头108通过魔术贴连接,主要是为了方便进行更换,该连接可靠。第一激光传感器109是用于测距,测量打磨头和工件之间的距离。
32.换料装置3,位于机器人机构1的一侧,和机器人机构1相互配合用于更换机器人机构1上的打磨头108;换料装置3包括框架31,设置到框架31上的放料机构32、换料机构33;其中放料机构32包括设置到框架31上部的下安装板322,下安装板322通过多个支杆324连接有上安装板323,下安装板322和上安装板323之间设置有料筒325,料筒325内设置有堆叠打磨头100,框架31的底部设置有顶起气缸321,顶起气缸321的驱动端位于料筒325底部;换料机构33包括设置到框架31上部的第一气缸331,第一气缸331的驱动端连接有水平状态的气缸移动板332,气缸移动板332的两端分别连接有第一移动板333和第二移动板334,第一移动板333上设置有第二气缸335,第二气缸335的驱动端连接有压件336,压件336的端部中间设置有缺口3362,缺口3362两侧均设置有锲形头3361。第一气缸331的后部设置有检测箱337,检测箱337上部设置有检测口内部设置有第二激光传感器338,检测箱337侧面设置有供第二移动板334进入的开口,第二移动板334进入开口后遮挡检测口。框架31上还设置有废料槽34。料筒325上还设置有观察用观察口326。通过顶起气缸321能够将堆叠打磨头100进行抬高,以实现打磨头108的抬高。具体换的时候,机器人机构1将打磨头108移动到废料槽34的一侧,第一气缸331和第二气缸移动,通过两个维度的配合实现对打磨头108的下料,同时机器人机构1去粘贴一个新的打磨头108,然后移动到检测箱337的上方,通过第二激光传感器338对粘贴后的打磨头108边缘进行检测,检测是否粘贴好。第二移动板334主要起到防水的作用。观察口326主要起到对内部打磨头108进行观察,以知道打磨头108的数量。
33.本实用新型的工作原理如下:
34.机器人机构1在需要换打磨头的时候,移动到换料装置上,通过第一气缸和第二气缸的配合将打磨头拆卸并放入到废料槽中,机器人机构去吸附一个新的打磨头,同时顶起气缸上移抬高堆叠打磨头的上部高度,在吸附后,放入到第二激光传感器上进行检测。
35.本装置具有如下优点:
36.本装置能够通过换料装置配合机器人实现对打磨头的更换,且能够对更换的打磨头进行位置检测。
37.以上所述仅是本实用新型的优选实施方式,并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。