1.本实用新型涉及锂电池生产技术领域,尤其是涉及一种基于视觉引导的极片裁切设备。
背景技术:
2.在锂电池生产技术领域中,极片需要绕卷形成电芯,当极片卷绕至设定的长度后,极片裁剪组件将会切断极片,以供下次绕卷。然而,现有的极片裁剪组件一般采用计米器计算极片的长度,此种计算方式测量的精度低,容易出现误差,导致绕卷形成的电芯存在差异。
技术实现要素:
3.本实用新型的主要目的在于提供一种基于视觉引导的极片裁切设备,以解决上述技术问题,能够提高传输的精度。
4.为实现上述目的,本实用新型采用如下技术方案:
5.一种基于视觉引导的极片裁切设备,包括有极片驱动组件、切刀驱动组件、切刀裁剪组件和视觉定位组件,所述极片驱动组件驱动所述极片移动,所述视觉定位组件识别极片上的v角,所述切刀驱动组件驱动所述切刀裁剪组件裁剪极片。
6.作为一种优选的技术方案,所述切刀驱动组件包括有切刀电机、偏心轴和连杆,所述连杆一端与所述偏心轴连接,另一端与所述切刀裁剪组件连接,所述切刀电机驱动所述偏心轴旋转,带动所述切刀裁剪组件裁剪极片。
7.作为一种优选的技术方案,所述切刀裁剪组件包括有切刀上模和切刀下模,所述连杆与所述切刀上模连接,所述切刀驱动组件驱动所述切刀上模向所述切刀下模靠近或者远离。
8.作为一种优选的技术方案,所述视觉定位组件包括有相机单元和光源单元,所述相机单元与所述光源单元对齐,极片于所述相机单元与所述光源单元之间移动。
9.作为一种优选的技术方案,所述相机单元包括有相机安装座、滑台和相机,所述相机设置于所述滑台上,所述滑台沿所述相机安装座移动。
10.作为一种优选的技术方案,所述光源单元包括有光源安装座和光源,所述光源设置于所述光源安装座上,所述光源与所述相机对齐。
11.作为一种优选的技术方案,其进一步设有传感器组件,所述传感器组件设置于所述视觉定位组件的一侧。
12.作为一种优选的技术方案,所述传感器组件包括有传感器、传感器支架和操作手柄,所述传感器设置于所述传感器支架上,所述操作手柄驱动所述传感器移动。
13.作为一种优选的技术方案,所述极片驱动组件包括有驱动电机、驱动辊和压辊单元,所述压辊单元与所述驱动辊对齐,所述驱动电机驱动所述驱动辊旋转。
14.作为一种优选的技术方案,所述压辊单元包括有气缸、压辊座和压辊,所述压辊旋
转设置于所述压辊座上,所述气缸驱动所述压辊座移动。
15.本实用新型的有益效果在于:上述基于视觉引导的极片裁切设备,能够通过视觉定位组件拍照识别,以判定极片驱动组件传输的精度是否准确,并且可以通过传感器组件检测极片,通过两者同时进行判定,调整极片输送长度,再通过切刀驱动组件驱动切刀裁剪组件裁剪极片,能够有效减少裁剪误差,提高极片裁剪精度。
附图说明
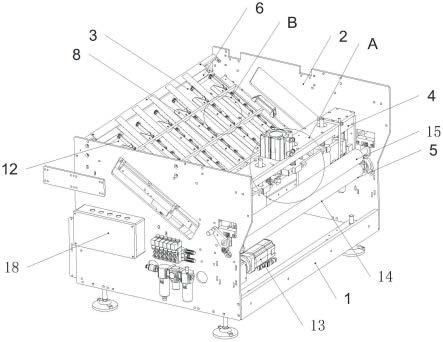
16.图1为本实用新型涉及的基于视觉引导的极片裁切设备的结构示意图;
17.图2为本实用新型涉及的极片驱动组件的结构示意图;
18.图3为本实用新型涉及的切刀驱动组件的结构示意图;
19.图4为本实用新型涉及的切刀裁剪组件的结构示意图;
20.图5为本实用新型涉及的视觉定位组件的结构示意图;
21.图6为本实用新型涉及的传感器组件的结构示意图。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.根据图1所示,一种基于视觉引导的极片裁切设备,包括有极片驱动组件1、切刀驱动组件2、切刀裁剪组件3、视觉定位组件4和传感器组件5,极片驱动组件1驱动极片a移动,传感器组件5设置于视觉定位组件4的一侧,当极片驱动组件1驱动极片a移动一段长度后停止驱动,极片a上的v角b恰好对齐于视觉定位组件4,视觉定位组件4对极片a进行拍照并计算形成数据,将数据传输中至plc控制模块中,传感器组件5检测v角b,并输送数据至plc控制模块中,plc控制模块对比两组数据,矫正送料长度,矫正完成后,切刀驱动组件2驱动切刀裁剪组件3裁剪极片a,能够有效减少裁剪误差,提高极片a裁剪精度。
24.根据图2所示,极片驱动组件1包括有驱动支架11以及设于驱动支架11上的驱动电机12、驱动辊13和压辊单元14,压辊单元14与驱动辊13对齐,极片a于压辊单元14与驱动辊13之间移动,压辊单元14将极片a压紧至驱动辊13上,驱动电机12驱动驱动辊13旋转,带动极片a移动,压辊单元14包括有气缸141、压辊座142和压辊143,压辊143旋转设置于压辊座142上,气缸141驱动压辊座142移动,能够维持压辊143对极片a的压力不变。
25.根据图3所示,切刀驱动组件2包括有切刀电机21、偏心轴22和连杆23,连杆23一端与偏心轴22连接,另一端与切刀裁剪组件3连接,切刀电机21驱动偏心轴22旋转,带动连杆23带动切刀裁剪组件3裁剪极片a。
26.根据图4所示,切刀裁剪组件3包括有切刀底座31、切刀上模32、切刀下模33、导套34和导杆35,切刀下模33设置于切刀底座31上,连杆23与切刀上模32连接,导套34设置于切刀上模32的两端,导杆35一端与切刀下模33固设,且导套34套设于导杆35上,使切刀上模32能够沿导杆35移动,切刀电机21驱动偏心轴22旋转,带动连杆23上下移动,以带动切刀上模32上下移动,使切刀上模32向切刀下模33靠近裁断极片a或者远离以供极片a通过。
27.根据图5所示,视觉定位组件4包括有相机单元41和光源单元42,相机单元41与光
源单元42对齐,极片a于相机单元41与光源单元42之间移动,相机单元41对极片a进行拍照识别,光源单元42为相机单元41提供光照支持,提高拍照的清晰度,降低识别干扰。相机单元41包括有相机安装座411、滑台412和相机413,相机413设置于滑台412上,滑台412沿相机安装座411移动,能够调节相机413的拍照位置,相机安装座411上设有刻度414,能够精准调节相机413的拍照位置,光源单元42包括有光源安装座421和光源422,光源422设置于光源安装座412上,光源422与相机413对齐。
28.根据图6所示,传感器组件5包括有传感器52、传感器支架51、传感器滑座53和操作手柄54,传感器52设置于传感器滑座53上,传感器滑座53可移动设置于传感器支架51上,操作手柄54上设有螺杆55,螺杆55与传感器滑座53啮合,驱动操作手柄54,能够带动传感器滑座53移动,以调节传感器52的位置。
29.以上所述实施例,只是本实用新型的较佳实例,并非来限制本实用新型的实施范围,故凡依本实用新型申请专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型专利申请范围内。
技术特征:
1.一种基于视觉引导的极片裁切设备,其特征在于,包括有极片驱动组件、切刀驱动组件、切刀裁剪组件和视觉定位组件,所述极片驱动组件驱动所述极片移动,所述视觉定位组件识别极片上的v角,所述切刀驱动组件驱动所述切刀裁剪组件裁剪极片。2.根据权利要求1所述的基于视觉引导的极片裁切设备,其特征在于,所述切刀驱动组件包括有切刀电机、偏心轴和连杆,所述连杆一端与所述偏心轴连接,另一端与所述切刀裁剪组件连接,所述切刀电机驱动所述偏心轴旋转,带动所述切刀裁剪组件裁剪极片。3.根据权利要求2所述的基于视觉引导的极片裁切设备,其特征在于,所述切刀裁剪组件包括有切刀上模和切刀下模,所述连杆与所述切刀上模连接,所述切刀驱动组件驱动所述切刀上模向所述切刀下模靠近或者远离。4.根据权利要求2或3所述的基于视觉引导的极片裁切设备,其特征在于,所述视觉定位组件包括有相机单元和光源单元,所述相机单元与所述光源单元对齐,极片于所述相机单元与所述光源单元之间移动。5.根据权利要求4所述的基于视觉引导的极片裁切设备,其特征在于,所述相机单元包括有相机安装座、滑台和相机,所述相机设置于所述滑台上,所述滑台沿所述相机安装座移动。6.根据权利要求5所述的基于视觉引导的极片裁切设备,其特征在于,所述光源单元包括有光源安装座和光源,所述光源设置于所述光源安装座上,所述光源与所述相机对齐。7.根据权利要求6所述的基于视觉引导的极片裁切设备,其特征在于,其进一步设有传感器组件,所述传感器组件设置于所述视觉定位组件的一侧。8.根据权利要求7所述的基于视觉引导的极片裁切设备,其特征在于,所述传感器组件包括有传感器、传感器支架和操作手柄,所述传感器设置于所述传感器支架上,所述操作手柄驱动所述传感器移动。9.根据权利要求6所述的基于视觉引导的极片裁切设备,其特征在于,所述极片驱动组件包括有驱动电机、驱动辊和压辊单元,所述压辊单元与所述驱动辊对齐,所述驱动电机驱动所述驱动辊旋转。10.根据权利要求9所述的基于视觉引导的极片裁切设备,其特征在于,所述压辊单元包括有气缸、压辊座和压辊,所述压辊旋转设置于所述压辊座上,所述气缸驱动所述压辊座移动。
技术总结
本实用新型涉及一种基于视觉引导的极片裁切设备,包括有极片驱动组件、切刀驱动组件、切刀裁剪组件和视觉定位组件,所述极片驱动组件驱动所述极片移动,所述视觉定位组件识别极片上的V角,所述切刀驱动组件驱动所述切刀裁剪组件裁剪极片。上述基于视觉引导的极片裁切设备,能够通过视觉定位组件拍照识别,以判定极片驱动组件传输的精度是否准确,并且可以通过传感器组件检测极片,通过两者同时进行判定,调整极片输送长度,再通过切刀驱动组件驱动切刀裁剪组件裁剪极片,能够有效减少裁剪误差,提高极片裁剪精度。提高极片裁剪精度。提高极片裁剪精度。
技术研发人员:余其伸 严海宏 刘军 薛文辉
受保护的技术使用者:东莞市雅康精密机械有限公司
技术研发日:2021.12.20
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。