1.本技术实施例涉及机器人技术设计领域,特别涉及一种足式机器人。
背景技术:
2.在机器人即时定位与地图构建(simultaneous localization and mapping,slam)过程中,感知系统输出是多传感器融合的结果,目前常用的融合方式是激光雷达、视觉传感器和惯性传感器的组合,室外场景需加gps组合输出位姿。
3.机器人不同于自动驾驶,使用场景非结构化,并且需要高度方向的估计,但以目前的现有技术,在一些特殊场景比如坐电梯、爬斜坡、弱gps或无gps场景时,高度就会失去可观性。在高度量测上,因为传感器的局限性,比如激光雷达和摄像头易受光照的影响,惯性传感器在高度上容易误差累计发散,而gps在高程测量本身误差较大,弱gps或无gps场景(比如半遮挡或室内)高度值完全不可用。
4.目前的技术,视觉、雷达感知无法在弱纹理特征和恶劣光照环境下实现高度的观测,室内没有gps信号,室外楼宇间大多情况高度测试不准。
技术实现要素:
5.本技术提供了一种足式机器人,不仅可以实现快速高度检测,提高高度检测的实时性;同时,实现了高精度的相对高度监测,弥补各种特殊场景下的高度测量,增强了高度的可观性。
6.本技术实施例提供了一种足式机器人,包括:
7.机身、至少两个气压计以及控制模块;
8.所述机身包括第一端和第二端,其中,所述第一端包括至少一个所述气压计,所述第二端包括至少一个所述气压计;所述至少两个气压计均与所述控制模块电连接。
9.可选的,所述足式机器人还包括至少两个气压计隔离罩,所述气压计布置在所述气压计隔离罩内。
10.可选的,所述足式机器人还包括多个通气孔,所述通气孔为所述机身的内外气体提供流通路径。
11.可选的,所述至少两个气压计隔离罩的表面设置有至少一个所述通气孔,所述机身的头部和尾部各设置有至少一个所述通气孔。
12.可选的,所述气压计隔离罩表面设置的通气孔为阵列排布的多个孔。
13.可选的,所述足式机器人还包括线路板,所述线路板设置于机身内,所述线路板靠近所述机身头部的一侧布置有散热风扇。
14.可选的,所述线路板的周围铺设有导热材料,所述导热材料上设置有导热片,所述导热材料用于向所述导热片传导所述线路板散发出来的热量。
15.可选的,所述气压计的上方设置有防尘屏蔽棉,所述防尘屏蔽棉用于阻止灰尘进入所述气压计中。
16.可选的,所述至少两个气压计位于所述机身的同侧,其中心连线与所述机身纵向平行。
17.可选的,所述至少两个气压计采用硅微结构材料制作。
18.以上技术方案可以看出,本技术实施例具有以下优点:
19.本技术中设计一种足式机器人,包括机身、至少两个气压计以及控制模块,其中,气压计的数据输出速率很高,可以实现快速高度检测,提高高度检测的实时性;同时,通过分别在机身的第一端和第二端布局至少一个气压计,进行差分检测,实现了高精度的相对高度监测,弥补各种特殊场景下的高度测量,增强了高度的可观性。
附图说明
20.图1为本技术其中一个实施方式的机器人的硬件结构示意图;
21.图2为本技术其中一个实施方式的机器人的机械结构示意图;
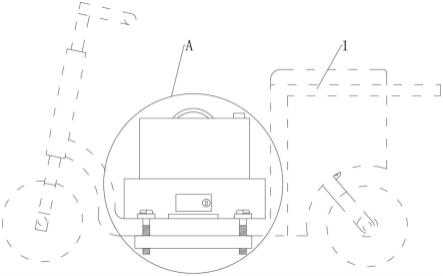
22.图3为本技术实施例中设有双mems气压计的足式机器人的结构示意图。
具体实施方式
23.应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
24.在后续的描述中,使用用于表示部件的诸如“模块”、“部件”或“单元”的后缀仅为了有利于本技术的说明,其本身没有特定的意义。因此,“模块”、“部件”或“单元”可以混合地使用。
25.请参阅图1,图1为本技术其中一个实施方式的多足机器人100的硬件结构示意图。在图1所示的实施方式中,多足机器人100包括机械单元101、通讯单元102、传感单元103、接口单元104、存储单元105、控制模块110、电源111。多足机器人100的各种部件可以以任何方式连接,包括有线或无线连接等。本领域技术人员可以理解,图1中示出的多足机器人100的具体结构并不构成对多足机器人100的限定,多足机器人100可以包括比图示更多或更少的部件,某些部件也并不属于多足机器人100的必须构成,完全可以根据需要在不改变发明的本质的范围内而省略,或者组合某些部件。
26.下面结合图1对多足机器人100的各个部件进行具体的介绍:
27.机械单元101为多足机器人100的硬件。如图1所示,机械单元101可包括驱动板1011、电机1012、机械结构1013,如图2所示,机械结构1013可包括机身主体1014、可伸展的腿部1015、足部1016,在其他实施方式中,机械结构1013还可包括可伸展的机械臂、可转动的头部结构、可摇动的尾巴结构、载物结构、鞍座结构、摄像头结构等。需要说明的是,机械单元101的各个部件模块可以为一个也可以为多个,可根据具体情况设置,比如腿部1015可为4个,每个腿部1015可配置3个电机1012,对应的电机1012为12个。
28.通讯单元102可用于信号的接收和发送,还可以通过与网络和其他设备通信,比如,接收遥控器或其他多足机器人100发送的按照特定步态以特定速度值向特定方向移动的指令信息后,传输给控制模块110处理。通讯单元102包括如wifi模块、4g模块、5g模块、蓝牙模块、红外模块等。
29.传感单元103用于获取多足机器人100周围环境的信息数据以及监控多足机器人100内部各部件的参数数据,并发送给控制模块110。传感单元103包括多种传感器,如获取
周围环境信息的传感器:激光雷达(用于远程物体检测、距离确定和/或速度值确定)、毫米波雷达(用于短程物体检测、距离确定和/或速度值确定)、摄像头、红外摄像头、全球导航卫星系统(gnss,global navigation satellite system)等。如监控多足机器人100内部各部件的传感器:惯性测量单元(imu,inertial measurement unit)(用于测量速度值、加速度值和角速度值的值),足底传感器(用于监测足底着力点位置、足底姿态、触地力大小和方向)、温度传感器(用于检测部件温度)。至于多足机器人100还可配置的载荷传感器、触摸传感器、电机角度传感器、扭矩传感器等其他传感器,在此不再赘述。
30.接口单元104可以用于接收来自外部装置的输入(例如,数据信息、电力等)并且将接收到的输入传输到多足机器人100内的一个或多个部件,或者可以用于向外部装置输出(例如,数据信息、电力等)。接口单元104可包括电源端口、数据端口(如usb端口)、存储卡端口、用于连接具有识别模块的装置的端口、音频输入/输出(i/o)端口、视频i/o端口等。
31.存储单元105用于存储软件程序以及各种数据。存储单元105可主要包括程序存储区和数据存储区,其中,程序存储区可存储操作系统程序、运动控制程序、应用程序(比如文本编辑器)等;数据存储区可存储多足机器人100在使用中所生成的数据(比如传感单元103获取的各种传感数据,日志文件数据)等。此外,存储单元105可以包括高速随机存取存储器,还可以包括非易失性存储器,例如磁盘存储器、闪存器、或其他易失性固态存储器。
32.显示单元106用于显示由用户输入的信息或提供给用户的信息。显示单元106可包括显示面板1061,可以采用液晶显示器(liquid crystal display,lcd)、有机发光二极管(organic light-emitting diode,oled)等形式来配置显示面板1061。
33.输入单元107可用于接收输入的数字或字符信息。具体地,输入单元107可包括触控面板1071以及其他输入设备1072。触控面板1071,也称为触摸屏,可收集用户的触摸操作(比如用户使用手掌、手指或适合的附件在触控面板1071上或在触控面板1071附近的操作),并根据预先设定的程式驱动相应的连接装置。触控面板1071可包括触摸检测装置1073和触摸控制器1074两个部分。其中,触摸检测装置1073检测用户的触摸方位,并检测触摸操作带来的信号,将信号传送给触摸控制器1074;触摸控制器1074从触摸检测装置1073上接收触摸信息,并将它转换成触点坐标,再送给控制模块110,并能接收控制模块110发来的命令并加以执行。除了触控面板1071,输入单元107还可以包括其他输入设备1072。具体地,其他输入设备1072可以包括但不限于遥控操作手柄等中的一种或多种,具体此处不做限定。
34.进一步的,触控面板1071可覆盖显示面板1061,当触控面板1071检测到在其上或附近的触摸操作后,传送给控制模块110以确定触摸事件的类型,随后控制模块110根据触摸事件的类型在显示面板1061上提供相应的视觉输出。虽然在图1中,触控面板1071与显示面板1061是作为两个独立的部件来分别实现输入和输出功能,但是在某些实施例中,可以将触控面板1071与显示面板1061集成而实现输入和输出功能,具体此处不做限定。
35.控制模块110是多足机器人100的控制中心,利用各种接口和线路连接整个多足机器人100的各个部件,通过运行或执行存储在存储单元105内的软件程序,以及调用存储在存储单元105内的数据,从而对多足机器人100进行整体控制。
36.电源111用于给各个部件供电,电源111可包括电池和电源控制板,电源控制板用于控制电池充电、放电、以及功耗管理等功能。在图1所示的实施方式中,电源111电连接控制模块110,在其它的实施方式中,电源111还可以分别与传感单元103(比如摄像头、雷达、
音箱等)、电机1012电性连接。需要说明的是,各个部件可以各自连接到不同的电源111,或者由相同的电源111供电。
37.在上述实施方式的基础上,具体地,在一些实施方式中,可以通过终端设备来与多足机器人100进行通信连接,在终端设备与多足机器人100进行通信时,可以通过终端设备来向多足机器人100发送指令信息,多足机器人100可通过通讯单元102来接收指令信息,并可在接收到指令信息的情况下,将指令信息传输至控制模块110,使得控制模块110可根据指令信息来处理得到目标速度值。终端设备包括但不限于:具备图像拍摄功能的手机、平板电脑、服务器、个人计算机、可穿戴智能设备、其它电器设备。
38.指令信息可以根据预设条件来确定。在一个实施方式中,多足机器人100可以包括传感单元103,传感单元103可根据多足机器人100所在的当前环境可生成指令信息。控制模块110可根据指令信息来判断多足机器人100的当前速度值是否满足对应的预设条件。若满足,则会保持多足机器人100的当前速度值和当前步态移动;若不满足,则会根据对应的预设条件来确定目标速度值和相应的目标步态,从而可控制多足机器人100以目标速度值和相应的目标步态移动。环境传感器可以包括温度传感器、气压传感器、视觉传感器、声音传感器。指令信息可以包括温度信息、气压信息、图像信息、声音信息。环境传感器与控制模块110之间的通信方式可以为有线通信,也可以为无线通信。无线通信的方式包括但不限于:无线网络、移动通信网络(3g、4g、5g等)、蓝牙、红外。
39.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.本技术实施例提供了一种足式机器人,不仅可以实现快速高度检测,提高高度检测的实时性;同时,实现了高精度的相对高度监测,弥补各种特殊场景下的高度测量,增强了高度的可观性。
41.需要说明的是,本技术对于足式机器人的描述皆是以图3所为参照,图3中,箭头指代的是气体流通路径的方向,其方向是从左往右,左边即是前方,右边即是后方。图3中给的例子是四足机器人,但实际本技术的设计思路也不仅仅限制于四足机器人的使用。
42.请参阅图3,本技术实施例提供了一种足式机器人,包括:
43.机身31、至少两个气压计32以及控制模块(图中未视);
44.所述机身31包括第一端311和第二端312,其中,所述第一端311包括至少一个所述气压计32,所述第二端312包括至少一个所述气压计32;所述至少两个气压计32均与所述控制模块电连接。
45.针对于目前视觉、雷达感知无法在弱纹理特征和恶劣光照环境下实现高度的观测,gps室内没有信号,室外楼宇间大多情况高程不准等问题,本技术实施例中,设计了一种气压计在足式机器人两端分别布局的装置,来实现差分检测。具体的,设置有至少两个气压计32,分别布局在机身的第一端和第二端,气压计之间间距可根据机器人机身长度进行设置,例如在0.5m~0.65m之间,实现绝对高度、相对高度的估计;同时靠近通风口区域,能够及时响应外部压强变化,各自远离发热源头,也避免温度影响检测的准确性。室内外平稳气流环境下,气压计高度检测相对准确性可达到2cm。
46.需要说明的是,机身的第一端可以是足式机器人头部,第二端是足式机器人尾部;也可以是第一端为足式机器人的前腿与机身连接端,第二端为足式机器人后腿与机身连接端,还可以是其他可以形成差分检测的位置,具体本技术不做限制。气压计可以设置为mems气压计,也可以是其他数据输出速率高的气压计,具体本技术也不做限制。气压计可以设置在机身内,也可设置在机身外,具体本技术不做限制。
47.需要说明的是,mems气压计是一种微机电系统气压传感器,其工作原理主要有两种:第一种原理是压电效应,即压电材料可以产生电流。第二种原理是静止系统的外力和为零。mems压力传感器本质上是一个空气腔,其一侧带有类似气球的柔性材料。当传感器位于气压较高的区域(例如低谷)时,膜就会由于外界压力变大而被推向腔内;当传感器位于气压低的区域(例如山峰),膜会从腔体中凸出。在这层膜上附有敏感材料。传感器可以读取材料(形变)产生的电流变化,然后通过该电流读数计算出施加到膜上的压力。因为腔内的压力已知,那么传感器就可以计算出外部压力大小了。
48.mems气压传感器因测量足够精确,且其低成本、低功耗和小尺寸,可用于各种应用。例如,能够根据相对气压区分建筑物的楼层;在一些gps信号不佳的场所,例如商场或体育场馆中,利用气压传感器确定的速度和航向信息可以计算出手机的位置;还可以为航位推算提供大量垂直方向(z轴方向)的运动信息。
49.此外,足式机器人还设置有控制模块,该控制模块包括有传感器单元,cpu单元以及执行单元。通过气压计32获取高精度的相对高度数据,再结合传感器单元获取的其他相关数据进行信息融合,经过cpu单元进行处理,输出高精度的高程图,执行单元可以根据数据处理的结果以及用户输入的指令等等,去控制足式机器人执行相应的相应。
50.本技术实施例中设计一种足式机器人,包括机身31、至少两个气压计32以及控制模块,其中,气压计32的数据输出速率很高,可以实现快速高度检测,提高高度检测的实时性;同时,通过分别在机身31的第一端311和第二端312布局至少一个气压计32,进行差分检测,实现了高精度的相对高度监测,弥补各种特殊场景下的高度测量,增强了高度的可观性。
51.可选的,所述足式机器人还包括至少两个气压计隔离罩33,所述气压计32布置在所述气压计隔离罩33内。
52.需要说明的是,本技术实施例中,足式机器人设置有至少两个气压计隔离罩33,分别布局与足式机器人的第一端311和第二端312,气压计32布局在气压计隔离罩33内,气压计隔离罩33对气压计32具有隔热和防尘的作用。
53.可选的,所述足式机器人还包括多个通气孔34,通气孔34为机身31的内外气体提供流通路径。
54.需要说明的是,本技术实施例中,足式机器人还设计有多个通气孔34,如图3所示,比如足式机器人包括12个通气孔34,通过将这些通气孔34设置在设定位置上,为足式机器人的内外气体提供了流通路径,以保证足式机器人的内部空气流通,维持良好散热,避免因为温度影响检测精确度。
55.可选的,所述至少两个气压计隔离罩33的表面设置有至少一个通气孔34,机身31的头部和尾部各设置有至少一个通气孔34。
56.需要说明的是,本技术实施例中,如图3所示,通气孔34共布局了12个,其中,足式
机器人机身31的正前面设置有2个通气孔,正后面设置有2个通气孔,以保证机身气体流通性和线路板35良好的散热性能;气压计隔离罩33的侧面和底部各2个通气孔34,以保障内部和外界的空气流通性,降低气压计32高度检测延迟。
57.可选的,气压计隔离罩33表面设置的通气孔34为阵列排布的多个孔。
58.本技术实施例中,气压计隔离罩表面设置的通气孔之间可以为阵列排布,通过在气压计隔离罩上设置多个阵列式小孔,例如2*3个,既防尘又能流通空气。需要说明的是,孔径可根据实际需要选择0.3-0.5cm。
59.可选的,所述足式机器人还包括线路板35,线路板35设置于机身31内,线路板35靠近机身31头部的一侧布置有散热风扇36。
60.需要说明的是,本技术实施例中,足式机器人还包括线路板35,布局在机身31内,图3中,线路板35位于两个气压计隔离罩33的中间,散热风扇36的后面,电性连接足式机器人各部位装置,以使得各装置互相配合,实现高精度高度检测。
61.需要说明的是,本技术实施例中,足式机器人还设置有散热风扇36,靠近机身31头部,图3中,位于线路板35的前方,气压计隔离罩33的后方,其作用是为线路板35散热。
62.可选的,线路板35的周围铺设有导热材料,所述导热材料上设置有导热片,所述导热材料用于向所述导热片传导线路板35散发出来的热量。
63.本技术实施例中,为保障良好的导热和散热性能,线路板35周围铺满导热材料,导热材料上盖上导热片。
64.导热材料可以是导热硅胶片、石墨片、导热胶水、导热硅脂等。需要说明的是,导热硅脂俗称散热膏,其以有机硅酮为主要原料,通过添加耐热、导热性能优异的材料,制成的导热型有机硅脂状复合物,可用于功率放大器、晶体管、电子管、cpu等电子元器件的导热及散热,从而保证电子仪器、仪表等的电气性能的稳定。导热硅脂具有高导热率,极佳的导热性,良好的电绝缘性(只针对绝缘导热硅脂),很好的使用稳定性,较低的稠度和良好的施工性能。其工作温度一般不超过200℃,高温可达300摄℃,低温一般为-60℃左右。
65.可选的,所述气压计32的上方设置有防尘屏蔽棉,所述防尘屏蔽棉用于阻止灰尘进入所述气压计32中。
66.可选的,所述至少两个气压计32位于所述机身31的同侧,其中心连线与所述机身31纵向平行。
67.可选的,所述至少两个气压计32采用硅微结构材料制作。
68.需要说明的是,本技术实施例中,气压计32采用硅微结构设计,具有高可靠性、抗过载和冲击,抗振动等特性。气压计32的odr(数据输出速率)很高,比如mems气压计的速率可达800hz,提高了高度检测的实时性。
69.本技术实施例中,针对气压计32高度检测易受到气流、温度等因素的影响,在装配方面远离热源,还在气压计32周围布局热引流和气流引流设备,优化了气压计检测环境,提升了检测精度。此外,本技术的气压计32布局在足式机器人机身31同侧,气压计32之间其中心连线和机身31纵向平行。该布局是为了感知冗余和感知算法精度优化,经过温度补偿和具体场景算法补偿后的气压计差分消除共模误差后的高度差用于倾角检测,精度初步估计可以达到0.02
°
以内,因此,本技术实施例中通过前后布置多气压计32的差分检测,不仅可以实现绝对高度、相对高度的估计,还可以辅助估计足式机器人机身31姿态和触地坡度。
70.在建筑物之间或之内气流比较平稳的场所,例如爬楼梯场景,本技术设计的足式机器人可根据气压计32场景检测数据集,通过气流检测辅助其他传感器完成特殊场景如开关电梯的检测以及室外风速等级的估计。
71.本技术设计的多气压计32可以弥补特殊场景高度的测量,增强高度的可观性,完成坐电梯楼层高度识别,斜坡高度识别以及室外暗光弱gps场景或无纹理特征弱gps场景高度的识别。
72.需要说明的是,对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。