1.本发明涉及一种执行器,特别是一种可变化多种形式、实现不同功能的功能可变执行器,属于机器人技术领域。
背景技术:
2.随着科技的进步和时代发展,人工智能逐渐兴起,具有自主性和智能性的机器人技术也在飞速发展,机器人逐渐拥有了感知环境、自主规划和与环境交互的能力,越来越多的产业使用机器人来进行生产作业,不仅提高了工作效率还大大降低了人工成本,尤其一些高风险工作,可以优先考虑让机器人去代替人工,于是研究者也更多地着眼于通过改进执行器结构提高机器人的自主适应性和功能性,使机器人可以适应更复杂的环境、适用于更广泛的领域。
3.目前机器人的执行器常见形式有轮式、足式、爪式等,有的机器人同时具有轮式和足式,称为轮足式机器人,在平坦的地面上采用轮式结构实现快速移动,在崎岖地面上采用足式结构以适应复杂环境。如专利[zl200810056851.2]公开的轮足两用式移动机器人、专利[zl201420779081.5]公开的轮足式机器人腿结构及具有该腿结构的轮足式机器人、专利[201620669063.0]公开的轮足机器人,该类机器人都是具有轮、足两套执行器,通过收起一种执行器让另外一种执行器与地面接触来实现不同的运动,或者直接将轮式执行器安装于足式运动机构上来实现轮足两用,该类执行器的组合形式在整体结构及控制系统方面都相对复杂。因此发明一种结构简单、控制方便、成本低廉的功能可变执行器可以拓宽机器人的应用领域。
技术实现要素:
[0004]
本发明的目的在于提供一种功能可变执行器,集轮式、足式、爪式执行器于一体,实现旋转、移动、抓取三种功能自如变化。
[0005]
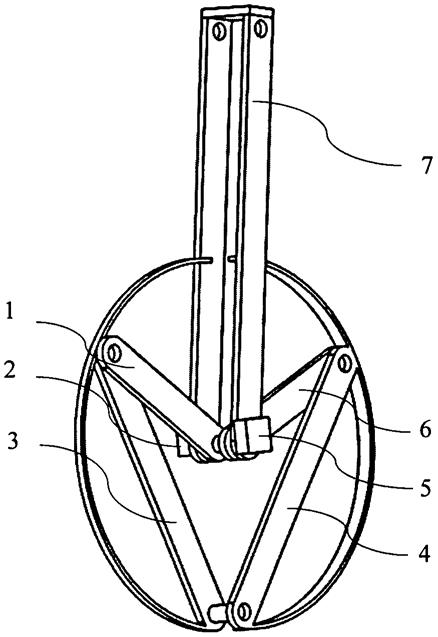
本发明解决其技术问题所采用的技术方案是:一种功能可变执行器,包括四连杆机构、安装杆和执行电机;所述四连杆机构包含两个简单直杆和两个具有半圆弧面的连杆,其中两个简单直杆长度相等,两个具有半圆弧面的连杆长度相等并且是简单直杆长度的倍,两个简单直杆的一端铰接在一起,该铰接点记作中心点,两个简单直杆的另一端分别与具有半圆弧面的连杆铰接在一起,两个具有半圆弧面的连杆另一端铰接在一起;所述安装杆由两个长板和一个短板呈凹字形连接而成,用于将四连杆机构和机器人本体相连;所述执行电机有两个,分别固定在所述安装杆的两个长板上,一个记作左侧执行电机,另一个记作右侧执行电机,左侧执行电机的输出端穿过中心点与四连杆机构整体相连接,右侧执行电机的输出端穿过中心点与一个简单直杆相连接。在不同的应用场合,通过控制右侧执行电机的旋转角度,可以驱动四连杆机构发生变形,变化成为轮式、足式或者爪式等不同结构的执行器,从而适应不同的环境或者实现不同的功能。
[0006]
本发明的有益效果是,结构简单,控制方便、成本低廉,可以通过简单的四连杆机
构变形成为可以实现不同功能的执行器。
附图说明
[0007]
图1为本发明功能可变执行器的整体结构示意图。
[0008]
图2为本发明功能可变执行器轮式实施例的结构示意图。
[0009]
图3为本发明功能可变执行器足式实施例的结构示意图。
[0010]
图4为本发明功能可变执行器爪式实施例的结构示意图。
具体实施方式
[0011]
下面结合实施例及其附图进一步叙述本发明:
[0012]
本发明涉及的功能可变执行器(参见图1~4),包括由简单直杆1、简单直杆6、具有半圆弧面的连杆3、具有半圆弧面的连杆4组成的四连杆机构、安装杆7以及左侧执行电机2和右侧执行电机5。
[0013]
下面给出本发明的具体实施例。具体实施例仅用于进一步说明本发明,不构成对本发明权利要求的限制。
[0014]
实施例1:
[0015]
本发明涉及的功能可变执行器变化为轮式结构,如图2所示,控制右侧执行电机5驱动与之相连的简单直杆6旋转,使两个简单直杆1和6之间的夹角为120
°
,四连杆机构发生相应运动后,两个具有半圆弧面的连杆3和4的两个半圆弧面正好形成一个整圆,通过控制左侧执行电机2旋转,可以驱动四连杆机构整体发生滚动,从而形成轮式结构执行器。
[0016]
实施例2:
[0017]
本发明涉及的功能可变执行器变化为足式结构,如图3所示,控制右侧执行电机5驱动与之相连的简单直杆6旋转,使两个简单直杆1和6完全重合,四连杆机构发生相应运动后,两个具有半圆弧面的连杆3和4的直杆部分也与两个简单直杆1和6处于一条直线上,通过控制左侧执行电机2往复旋转,可以驱动四连杆机构整体发生前后摆动,从而形成足式结构执行器。
[0018]
实施例3:
[0019]
本发明涉及的功能可变执行器变化为爪式结构,如图4所示,控制右侧执行电机5驱动与之相连的简单直杆6旋转,使两个简单直杆1和6之间的夹角大于120
°
,四连杆机构发生相应运动后,两个具有半圆弧面的连杆3和4的圆弧部分张开形成爪型,通过控制右侧执行电机5往复旋转可以驱动,两个具有半圆弧面的连杆3和4的圆弧部分发生夹持运动,从而形成爪式结构执行器。
技术特征:
1.一种功能可变执行器,其特征在于:包括四连杆机构、安装杆和执行电机;所述四连杆机构包含两个简单直杆和两个具有半圆弧面的连杆,其中两个简单直杆长度相等,两个具有半圆弧面的连杆长度相等并且是简单直杆长度的倍,两个简单直杆的一端铰接在一起,该铰接点记作中心点,两个简单直杆的另一端分别与具有半圆弧面的连杆铰接在一起,两个具有半圆弧面的连杆另一端铰接在一起;所述安装杆由两个长板和一个短板呈凹字形连接而成,用于将四连杆机构和机器人本体相连;所述执行电机有两个,分别固定在所述安装杆的两个长板上,一个记作左侧执行电机,另一个记作右侧执行电机,左侧执行电机的输出端穿过中心点与四连杆机构整体相连接,右侧执行电机的输出端穿过中心点与一个简单直杆相连接。2.如权利要求1所述的功能可变执行器,其特征在于:控制右侧执行电机驱动与之相连的简单直杆旋转,使两个简单直杆之间的夹角为120
°
,四连杆机构发生相应运动后,具有半圆弧面的连杆的两个半圆弧面正好形成一个整圆,通过控制左侧执行电机旋转,可以驱动四连杆机构整体发生滚动,从而形成轮式结构执行器。3.如权利要求1所述的功能可变执行器,其特征在于:控制右侧执行电机驱动与之相连的简单直杆旋转,使两个简单直杆完全重合,四连杆机构发生相应运动后,两个具有半圆弧面的连杆的直杆部分也与两个简单直杆处于一条直线上,通过控制左侧执行电机往复旋转,可以驱动四连杆机构整体发生前后摆动,从而形成足式结构执行器。4.如权利要求1所述的功能可变执行器,其特征在于:控制右侧执行电机驱动与之相连的简单直杆旋转,使两个简单直杆之间的夹角大于120
°
,四连杆机构发生相应运动后,两个具有半圆弧面的连杆的圆弧部分张开形成爪型,通过控制右侧执行电机往复旋转可以驱动,两个具有半圆弧面的连杆的圆弧部分发生夹持运动,从而形成爪式结构执行器。
技术总结
本发明涉及一种功能可变执行器,属于机器人技术领域,其特征在于:包括四连杆机构、安装杆和执行电机;所述四连杆机构包含两个简单直杆和两个具有半圆弧面的连杆,两个简单直杆的一端铰接在一起,另一端分别与具有半圆弧面的连杆铰接在一起,两个具有半圆弧面的连杆另一端铰接在一起;所述安装杆由两个长板和一个短板呈凹字形连接而成,用于将四连杆机构和机器人本体相连;所述执行电机有两个,分别固定在所述安装杆的两个长板上,左侧执行电机的输出端穿过中心点与四连杆机构整体相连接,右侧执行电机的输出端穿过中心点与一个简单直杆相连接。通过控制右侧执行电机驱动四连杆机构发生变形,变化成为轮式、足式或者爪式等不同结构的执行器。构的执行器。构的执行器。
技术研发人员:肖轩 张怀玉 刘健 王玉海 薛永江 吴爽
受保护的技术使用者:天津工业大学
技术研发日:2020.05.22
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。