泵吸式捕捞海参rov
技术领域
1.本实用新型涉及海洋牧场和水下捕捞装备领域,特别是一种泵吸式捕捞海参rov(remoteoperated vehicle,遥控无人潜水器,简称rov,下同)。
背景技术:
2.海洋不仅蕴藏着丰富的矿产资源,也孕育着大量的生物,是一个宝贵的粮仓。海参一般生活在海底,体内富含氨基酸、胶原蛋白等营养成分,是一种珍贵的食药资源。随着海洋牧场的兴起和发展,对海参捕捞提出了更高的需求,传统的人工捕捞方式风险高、效率低,捕捞人员长期在水下作业对身心健康有伤害,用水下机器人代替人工作业是大势所趋。
3.授权公告号为cn 209965014 u的实用新型专利公开了一种海参捕捞装置,该装置的采集吸管安装角度固定,管口不能灵活移动,限制了作业效率;申请公布号为cn 111587850 a的发明专利申请也公开了一种海参捕捞装置,该装置采用了先抓取后抽取的方案,但是其存在抓取不牢靠的缺陷,也容易对海参造成伤害;授权公告号为cn 214546666 u的实用新型专利公开了一种海参捕捞机器人,其吸管的姿态变化由电机和同步带驱动,导致结构复杂。
技术实现要素:
4.本实用新型的目的在于克服现有技术存在的上述缺陷,提出了一种泵吸式捕捞海参rov,其结构简单,运动灵活,捕捞效率高,作业范围广泛,不会对捕捞的海参造成伤害。
5.本实用新型的技术方案是:一种泵吸式捕捞海参rov,包括rov载体和捕捞装置,捕捞装置设置在rov载体上,其中,所述捕捞装置包括轴流泵、储存箱、吸管和机械臂,储存箱固定在rov载体上,轴流泵集成在储存箱的内部,机械臂设置在rov载体的前端,吸管的一端与储存箱连接,吸管的另一端为为吸取海参的接口;
6.所述机械臂包括三个关节和两个手臂,三个关节分别为根部关节、肩关节和肘关节,两个手臂分别为大臂和小臂,其中根部关节位于顶板的前端下侧,肩关节用于连接根部关节和大臂,肘关节用于连接大臂和小臂,通过肘关节实现小臂的上下摆动,根部关节通过大舵机ⅰ驱动,肩关节通过大舵机ⅱ驱动,肘关节通过小舵机驱动;
7.所述根部关节包括大舵机底座、传动轴和安装座,大舵机ⅰ通过安装座与顶板固定连接,大舵机底座位于大舵机ⅰ的上方,大舵机ⅰ的输出轴通过传动轴与大舵机底座连接,肩关节的大舵机ⅱ固定在大舵机底座上传动轴与安装座之间设有轴承;
8.所述两侧的大臂之间通过大臂连杆固定连接,大臂的一端与大舵机ⅱ的输出轴连接,通过大舵机ⅱ驱动大臂上下摆动,大臂的另一端固定有小舵机底座,小舵机安装在小舵机底座上,u型臂的一端与小舵机的输出轴连接,u型臂的另一端与小臂固定连接,通过小舵机驱动小臂上下摆动,吸管穿插于大臂和小臂内。
9.本实用新型中,所述吸管的一端为圆形接口,并与储存箱连接,吸管的另一端为锥形接口,用于吸取海参,锥形接口的角度为135
°
。
10.所述储存箱内设有圆柱形过滤网,储存箱的后部设有用于清除过滤杂质的小窗口。
11.所述肩关节的摆动幅度最大为150
°
,肘关节的摆动幅度最大为270
°
。
12.所述rov载体包括主体框架、电控系统和推进系统,主体框架由顶板、立板和底板对接安装而成,顶板和底板位于两侧的立板之间,两侧的立板之间通过顶板和底板固定连接,捕捞装置、推进系统、浮力块、吊钩均安装在顶板上,电控系统和密封舱安装在底板上。
13.所述推进系统包括四个垂直推进器和四个水平推进器,垂直推进器和水平推进器均固定在顶板的下表面,四个垂直推进器在顶板的前、后、左、右四个方向对称分布,顶板的前部和后部分别设有两个水平推进器,水平推进器均呈45
°
矢量布局,水平推进器靠近底板,垂直推进器和水平推进器之间的高度差为80-90mm。
14.所述四个浮力块安装于顶板的上表面且两立板的内侧,顶板的中部固定有储存箱,储存箱的两侧分别设有两个浮力块,浮力块上设有便于垂直推进器排水的水道,吊钩贯穿浮力块固定于顶板的上表面。
15.所述电控系统安装于独立的密封舱内,密封舱的两端分别通过密封端盖密封,电控系统利用安装在密封端盖上的水密插头进行电能和数据的传输,密封舱固定在底板上。
16.所述主体框架的前部设有观测系统,观测系统包括两个水下摄像头和四个照明灯,其中水下摄像头位于机械臂的两侧且呈对称设置,四个照明灯分别位于主体框架前部内侧的四个角落。
17.本实用新型的有益效果是:
18.(1)本技术将泵吸式捕捞装置搭载于rov载体上,rov载体的搭载能力强,机动性高,作业范围广泛;
19.(2)机械臂运动灵活,从而使吸管的管口活动范围大,解决了捕捞效率低、运动不灵活、结构复杂等问题;
20.(3)通过泵吸式吸取海参的捕捞方式,可以避免对捕捞的海参造成伤害。
21.综上所述,本实用新型可以大大提高海参的自动捕捞效率和捕捞效果,在海洋牧场中具有较高的推广价值。
附图说明
22.图1是本实用新型的结构示意图;
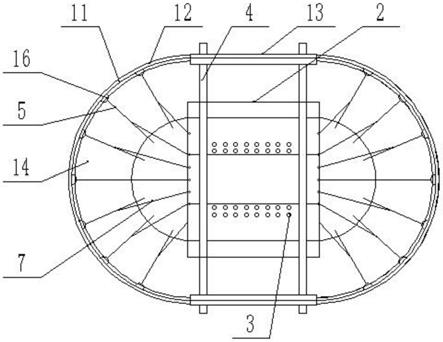
23.图2是框架和推进系统的结构示意图;
24.图3是捕捞装置的结构示意图;
25.图4是捕捞装置中机械臂的结构示意图;
26.图5是机械臂的根部关节剖面图;
27.图6是机械臂的肩关节和肘关节的结构示意图。
28.图中:1rov载体;2捕捞装置;3顶板;4立板;5底板;6浮力块;7吊钩;8电控系统;9密封舱;10密封端盖;11水密插头;12垂直推进器;13水平推进器;14水下摄像头; 15照明灯;16轴流泵;17储存箱;18根部关节;19肩关节;20大臂;21肘关节;22小臂; 23吸管;24大舵机底座;25传动轴;26安装座;27大舵机ⅰ;28轴承;29大臂连杆;30 小舵机;31小舵机底座;32u型臂;33大舵机ⅱ。
具体实施方式
29.为了使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
30.在以下描述中阐述了具体细节以便于充分理解本实用新型。但是本实用新型能够以多种不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广。因此本实用新型不受下面公开的具体实施方式的限制。
31.如图1和图2所示,本实用新型所述的泵吸式捕捞海参rov包括rov载体1和捕捞装置 2,捕捞装置2设置在rov载体1上。rov载体1包括主体框架、电控系统8和推进系统,主体框架由顶板3、立板4和底板5对接安装而成,顶板3和底板5位于两侧的立板4之间,两侧的立板4之间通过顶板3和底板5固定连接,两立板起到了支撑作用。捕捞装置2、推进系统、浮力块6、吊钩7均安装在顶板3上,电控系统8和密封舱9安装在底板5上。
32.本实施例中,推进系统包括四个垂直推进器12和四个水平推进器13,垂直推进器12通过安装座固定在顶板3的下表面,水平推进器13通过连杆固定在顶板3的下表面。四个垂直推进器12在顶板3的前、后、左、右四个方向对称分布。顶板3的前部和后部分别设有两个水平推进器13,水平推进器13均呈45
°
矢量布局,且水平推进器13靠近底板5,垂直推进器12和水平推进器13之间的高度差为85mm。
33.本实施例中,四个浮力块6安装于顶板3的上表面且两立板4的内侧。顶板3的中部固定有储存箱17,储存箱17的两侧分别设有两个浮力块6,浮力块6上设有便于垂直推进器排水的水道。吊钩7贯穿浮力块固定于顶板的上表面,本实施例中,储存箱17的两侧对称设有两吊钩7。
34.电控系统8安装于独立的密封舱9内,密封舱9的两端分别通过密封端盖10密封,电控系统8利用安装在密封端盖10上的水密插头11进行电能和数据的传输。密封舱9通过拱形卡箍固定在底板5上。
35.主体框架的前部还设有观测系统,本实施例中,观测系统包括两个水下摄像头14和四个照明灯15,其中水下摄像头14位于捕捞装置2的两侧且呈对称设置。四个照明灯15分别位于主体框架前部内侧的四个角落。
36.如图3所示,捕捞装置2包括轴流泵16、储存箱17、吸管23和机械臂,储存箱17固定在顶板3上表面的中部,轴流泵16集成在储存箱17的内部,用于产生负压吸取海参,机械臂设置在rov载体1的前端。吸管23为软管,吸管23的一端为圆形接口,并与储存箱17连接,吸管23的另一端为锥形接口,用于吸取海参,本实施例中,其锥形接口的角度为135
°
。吸管23穿插在机械臂内,通过机械臂控制吸管23的活动范围,增大了吸管管口的活动范围。储存箱17内设有圆柱形过滤网,通过圆柱形过滤网对海水中的杂质进行过滤。储存箱17的后部设有小窗口,用于清除过滤的杂质。储存箱17的顶部表面、前侧面和后侧面分别设有矩形窗口,用于观察储存箱17内的情况。
37.如图3和图4所示,机械臂包括三个关节和两个手臂,三个关节分别为根部关节18、肩关节19和肘关节21,两个手臂分别为大臂20和小臂22,其中根部关节18位于顶板3的前端下侧,通过根部关节18实现整个机械臂的左右摆动。肩关节19用于连接根部关节18和大臂20,通过肩关节19实现大臂20的上下摆动。肘关节21用于连接大臂20和小臂22,通过肘关节21实现小臂22的上下摆动。根部关节18通过大舵机ⅰ27驱动,肩关节19通过大舵机ⅱ33驱
动,肘关节21通过小舵机驱动。肩关节19的摆动幅度最大为150
°
,肘关节21的摆动幅度最大为270
°
。
38.如图5所示,根部关节18包括大舵机底座24、传动轴25和安装座26,大舵机ⅰ27通过安装座26与顶板3固定连接。大舵机底座24位于大舵机ⅰ27的上方,大舵机ⅰ27的输出轴通过传动轴25与大舵机底座24连接,肩关节19的大舵机ⅱ33固定在大舵机底座24上传动轴25与安装座26之间设有轴承28。传动轴25用于将大舵机ⅰ27的动力传递给大臂20,通过大舵机ⅰ27驱动大臂20和与大臂连接的小臂22左右摆动。本实施例中,大舵机ⅰ27的型号为ds300,轴承28的型号为深沟球轴承gb61906。
39.如图6所示,两侧的大臂20之间通过大臂连杆29固定连接,大臂20的一端与大舵机
ⅱꢀ
33的输出轴连接,通过大舵机ⅱ33驱动大臂20上下摆动。大臂20的另一端固定有小舵机底座31,小舵机30安装在小舵机底座31上。小舵机30通过u型臂32驱动小臂22,即u型臂的一端与小舵机30的输出轴连接,u型臂32的另一端与小臂22固定连接,通过小舵机30 驱动小臂22上下摆动。如图3所示,吸管23穿插于大臂20和小臂22内。
40.本实施例中,顶板3、立板4和底板5均采用了局部镂空,小臂22上间隔设置数个孔,通过上述设置,降低了整个rov的重量。
41.泵吸式捕捞海参rov工作时,首先捕捞装置2随rov载体1进入海参捕捞区域,然后机械臂动作,大舵机ⅰ27、大舵机ⅱ33和小舵机30工作,通过根部关节18实现机械臂的左右摆动,通过肩关节19实现大臂20的上下摆动,通过肘关节21实现小臂22的上下摆动,机械臂动作的同时,带动吸管23上下摆动和左右摆动,增大了吸管管口的活动范围。在轴流泵 16的负压作用下,将海参通过吸管23吸入储存箱17内,同时通过储存箱17内的过滤网清除海水中的杂质。
42.以上对本实用新型所提供的泵吸式捕捞海参rov进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。