1.本发明涉及探针的光学对准。
背景技术:
2.大量的医疗手术涉及将探针诸如导丝和导管放置在患者体内。已经开发出位置感测系统来跟踪这类探头。磁性位置感测为本领域已知的一种方法。在磁性位置感测中,通常将磁场发生器放置在患者体外的已知位置处。探头的远侧端部内的磁场传感器响应于这些磁场生成电信号,这些电信号被处理以确定探头的远侧端部的坐标位置。这些方法和系统在美国专利5,391,199、6,690,963、6,484,118、6,239,724、6,618,612和6,332,089中、在pct国际专利公布wo 1996/005768中、以及在美国专利申请公布2003/0120150和2004/0068178中有所描述,这些专利的公开内容全部以引用方式并入本文。
3.授予osadchy等人的美国专利6,266,551(下文的
‘
551专利),其以引用的方式并入本文,描述了一种用于插入受试者的身体中的探针,该探针具有远侧端部和近侧端部,并且包括电子微电路,该电子微电路存储与探针的校准有关的信息。优选地,该微电路存储校准代码,该校准代码被加密。另选地或另外地,微电路存储使用代码,该使用代码控制探针对其用户的可用性。探针包括访问控制电路,该访问控制电路允许改变使用代码以便减少探针的可用性,但不增加其可用性。
4.'551专利描述了用于导管位置和取向的电磁检测的系统通常位于导管中靠近该导管的远端尖端的较小距离处,因为该远侧尖端通常被电极或其他功能元件占据。因此,需要校准位置和取向检测系统以考虑导管的远侧尖端相对于线圈位置的位移。由于制造变化,这种位移通常从一个导管到另一个导管而有所不同。此外,用于生成位置信号的线圈可能不是精确地正交的。出于计算导管的位置和取向的目的,线圈的轴线限定固定到导管尖端的坐标系的相应轴线,并且这些轴线的方向必须相对于导管是已知。如果这些轴线偏离正交性,则必须知道和校正相应的偏差程度以用于位置和取向计算。另外,线圈的相对增益确定了线圈响应于外部施加的场所生成的相应位置信号的强度。由于这些信号强度用于计算导管的位置和取向,因此增益与其预期值的偏差将导致计算的位置和取向的不准确性。因此,必须知道和校正线圈的相应增益以用于位置和取向计算。
5.‘
551专利提供了一种校准用于确定导管的位置和取向的装置的方法,其中校准信息保留在导管中。校准信息数字地存储在微电路中,该微电路的位置易于访问信号处理电路和计算设备,使得导管不需要容纳数字信号线,并使得从微电路传输到信号处理电路和计算设备的数字电子信号不干扰由电线从导管远侧端部传送到电路的低电平模拟信号。
6.‘
551专利描述了用于确定导管在身体内部的位置和取向的装置。该装置(诸如亥姆霍兹校准室)包括与导管的远侧端部相邻的多个线圈。导管还包括与导管的近侧端部相邻的电子微电路。微电路存储与装置的校准有关的信息。
7.授予acker的美国专利6,427,314描述了一种磁性位置和取向确定系统,其使用磁场,有利地包括来自定位于感测体积相对侧上的亥姆霍兹线圈的均匀场和由相同线圈生成
的梯度场。通过在施加这些场期间监测在探针处检测到的场分量,可推导该场中探针的位置和取向。探针的表示可以叠加在受试者的单独获取的图像上,以示出探针相对于受试者的位置和取向。
8.cohen等人的美国专利公布2019/0044784描述了一种用于显示位于身体内的感兴趣的移动区域的设备,该设备包括定位系统以确定医疗装置的位置和取向(p&o)以及使用内部位置参考传感器跟踪感兴趣区域随时间推移的运动。补偿功能块基于感兴趣区域的运动生成运动补偿功能,该运动补偿功能被配置成补偿感兴趣区域在第一时间和第二时间之间的运动,第一时间例如为获取图像时的时间,第二时间例如为测量装置的p&o的时间。使用补偿功能校正测量的p&o。根据校正的p&o将医疗装置的表示叠加在图像上。
9.strommer等人的美国专利公布2006/0058647描述了一种用于将与导管耦合的医疗装置递送到患者的身体的内腔内的选定位置的方法,该方法包括以下程序:将三维坐标系与二维坐标系配准,三维坐标系与医疗定位系统(mps)相关联,二维坐标系与内腔的二维图像相关联,二维图像进一步与患者的器官的器官定时信号相关联;获取相应于该内腔内的多个点的mps数据,这些点中的每个点与三维坐标系相关联,这些点中的每个点进一步与器官的相应活动状态相关联;由与相应活动状态相关联的获取的mps数据确定每个相应活动状态的时间三维轨迹表示;根据相应活动状态,将时间三维轨迹表示叠加在二维图像上;通过沿着该时间三维轨迹表示选择这些点中的至少一个点来接收相应于该选定位置的位置数据;由该选定的至少一个点确定三维坐标系中的该选定位置的坐标;根据附接至医疗装置附近的导管的mps传感器的输出,确定该医疗装置在三维坐标系中的当前位置;根据相对于选定位置的当前位置,通过内腔朝向该选定位置操纵医疗装置;以及当该当前位置基本上匹配选定位置时产生通知输出。
技术实现要素:
10.根据本公开的一个实施方案提供了一种用于校准包括图像传感器和磁场传感器的探针的设备,该设备包括夹具,该夹具被配置成保持探针;磁场发生器,该磁场发生器被配置成生成具有与夹具对准的预定方向的至少一个磁场;光学靶,该光学靶与夹具对准,使得探针中的图像传感器能够在该探针被保持在夹具中时捕获光学靶的图像;以及处理电路,该处理电路被配置成从探针接收由磁场传感器响应于至少一个磁场输出的信号以及由图像传感器在探针被保持在夹具中时捕获的图像,并且响应于所接收的信号和所接收的图像来校准图像传感器相对于磁场传感器的对准。
11.还根据本公开的一个实施方案,处理电路被配置成响应于所接收的信号来校准磁场传感器与由磁场发生器生成的至少一个磁场的对准。
12.还根据本公开的一个实施方案,处理电路被配置成将图像传感器相对于磁场传感器的对准以及磁场传感器与至少一个磁场的对准储存在探针所包括的存储装置中。
13.另外,根据本公开的一个实施方案,处理电路被配置成响应于所接收的信号来计算磁场传感器的灵敏度。
14.此外,根据本公开的一个实施方案,光学靶包括多个对准特征,所接收的图像包括多个对准特征中的至少一些对准特征,并且处理电路被配置成响应于至少一些对准特征中的相应对准特征在所接收的图像中的相应位置来计算图像传感器的光学像差校正。
15.还根据本公开的一个实施方案,处理电路被配置成响应于由至少一些对准特征中的相应对准特征在所接收的图像中的相应位置限定的至少一条线的曲率来计算图像传感器的光学像差校正。
16.还根据本公开的一个实施方案,光学靶标包括多个交替的矩形部分,并且处理电路被配置成找到与多个对准特征中的相应对准特征相对应的矩形部分中的相应矩形部分之间的相应边界。
17.另外,根据本公开的一个实施方案,该矩形部分中的一些矩形部分之间的中心边界与多个对准特征中的中心对准特征相对应,该处理电路被配置成响应于中心对准特征在所接收的图像中的位置来校准图像传感器相对于磁场传感器的对准。
18.此外,根据本公开的一个实施方案,光学靶被配置成围绕中心对准特征旋转,并且处理电路被配置成接收由光学靶的图像传感器在光学靶的多个相应旋转位置处捕获的多个相应图像,并且响应于至少一些对准特征中的相应对准特征在所接收的相应图像中的相应位置来计算图像传感器的光学像差校正。
19.还根据本公开的一个实施方案,磁场发生器包括分别与磁性坐标系的三个正交轴线对准的三个校准线圈组,磁场传感器包括三个位置线圈,并且处理电路被配置成致动校准线圈组以生成磁场以供位置线圈检测,并且对于位置线圈中的每个位置线圈,响应于从位置线圈接收的信号来校准与磁性坐标系的对准。
20.还根据本公开的一个实施方案,校准线圈组中的每个校准线圈组为亥姆霍兹线圈。
21.根据本公开的另一实施方案,还提供了一种用于校准包括图像传感器和磁场传感器的探针的方法,该方法包括将探针设置在夹具中,生成具有与夹具对准的预定方向的至少一个磁场,在探针被保持在夹具中时用图像传感器捕获与夹具对准的光学靶的图像,从探针接收由磁场传感器响应于至少一个磁场输出的信号以及由图像传感器在探针被保持在夹具中时捕获的图像,以及响应于接收的信号和接收的图像来校准图像传感器相对于磁场传感器的对准。
22.另外,根据本公开的一个实施方案,该方法包括响应于接收的信号来校准磁场传感器与至少一个磁场的对准。
23.此外,根据本公开的一个实施方案,该方法包括将图像传感器相对于磁场传感器的对准以及磁场传感器与至少一个磁场的对准存储在探针中包括的存储装置中。
24.还根据本公开的一个实施方案,该方法包括响应于接收的信号来计算磁场传感器的灵敏度。
25.还根据本公开的一个实施方案,该光学靶包括多个对准特征,接收的图像包括多个对准特征中的至少一些对准特征,并且该方法包括响应于至少一些对准特征中的相应对准特征在所接收的图像中的相应位置来计算图像传感器的光学像差校正。
26.另外,根据本公开的一个实施方案,光学像差校正的计算响应于由至少一些对准特征中的相应对准特征在所接收的图像中的相应位置所限定的至少一条线的曲率来执行。
27.此外,根据本公开的一个实施方案,该光学靶标包括多个交替的矩形部分,并且该方法还包括找到与多个对准特征中的相应对准特征相对应的矩形部分中的相应矩形部分之间的相应边界。
28.还根据本公开的一个实施方案,该矩形部分中的一些矩形部分之间的中心边界与多个对准特征中的中心对准特征相对应,校准图像传感器相对于磁场传感器的对准响应于中心对准特征在所接收的图像中的位置来执行。
29.还根据本公开的一个实施方案,该方法包括使光学靶围绕中心对准特征旋转到多个旋转位置,接收由光学靶的图像传感器在该光学靶的多个旋转位置中的相应旋转位置处捕获的多个相应图像,并且其中计算图像传感器的光学像差校正响应于至少一些对准特征中的相应对准特征在所接收的相应图像中的相应位置来执行。
30.另外,根据本公开的一个实施方案,该方法包括致动分别与磁性坐标系的三个正交轴线对准的三个校准线圈组,以生成磁场以供磁场传感器的三个位置线圈检测,并且对于位置线圈中的每一个,响应于从位置线圈接收的信号来校准与磁性坐标系的对准。
附图说明
31.根据以下详细说明结合附图将理解本发明,其中:
32.图1至图3为根据本发明的一个实施方案构造和操作的探针的示意图;
33.图4为图1的探针的远侧端部的剖视图;
34.图5为根据本发明的一个实施方案构造和操作的校正设备的等轴视图;
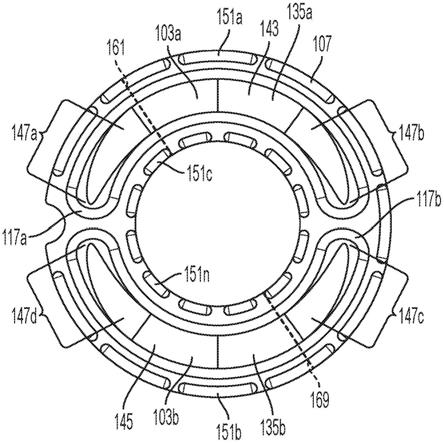
35.图6为图5的校准设备的前视图;
36.图7为图5的校准设备的侧视图;
37.图8为图5的设备中分析的所捕获的图像的示意图;
38.图9为示出图5的设备中的光学像差校正方法的示意图;
39.图10为图5的设备中的另一所捕获的图像的示意图;并且
40.图11为包括图5的设备中的操作方法中的步骤的流程图。
具体实施方式
41.概述
42.对于具有图像传感器(例如,相机)和磁场传感器的探针(诸如导管、导丝或医疗工具,例如ent工具),图像传感器和磁场传感器两者均可能需要与探针的轴线对准,或者另选地可能需要通过校准来补偿任何未对准。对准或校准的需要通常源自在探针制造期间结合的不准确性,尤其是在探针被手动组装时。应当注意,对于图像传感器而言,即使小的未对准也可导致在配准图像传感器图像时的相对较大误差,例如,当图像沿同一身体部分的不同图像(例如,ct、mri或超声图像)并排显示或叠加在该不同的图像上时。
43.一种解决方案是在磁场校准设备(诸如
‘
551专利中所述的校准装置)中校准磁场传感器,并且例如通过将探针置于具有与光学靶对准的固定取向的夹具中并分析由图像传感器捕获的图像以确定图像传感器的对准校正,来单独校准光学校准装置中的图像传感器。这种单独的校准是耗时的并且由于两个校准装置之间的差异而易于出错。
44.本发明的实施方案通过提供在探针被保持在同一夹具中时组合图像传感器和磁场传感器的校准的设备来解决上述问题。
45.磁场发生器生成具有与夹具对准的预定方向的至少一个时变磁场。光学靶与夹具对准,使得探针中的图像传感器能够在探针被保持在夹具中时捕获光学靶的图像。处理电
路从探针接收由磁场传感器响应于一个或多个磁场输出的信号以及由图像传感器在探针被保持在夹具中时捕获的图像。处理电路响应于一个或多个所接收的信号和所接收的图像来校准图像传感器相对于磁场传感器的对准。处理电路还响应于一个或多个所接收的信号来校准磁场传感器与由磁场发生器生成的一个或多个磁场的对准。
46.在一些实施方案中,光学靶包括多个对准特征,诸如交替的矩形部分,例如,交替的黑色和白色正方形,类似于国际象棋盘或跳棋盘。因此,从图像传感器接收的图像包括多个对准特征中的至少一些,并且处理电路找到与相应对准特征相对应的相应矩形部分之间的相应边界。在光学靶的中心处的矩形部分之间的中心边界与中心对准特征相对应,并且处理电路响应于中心对准特征和/或其他特征在所接收的图像中的位置来校准图像传感器相对于磁场传感器的对准。
47.在一些实施方案中,处理电路响应于相应对准特征在所接收的图像中的相应位置来计算图像传感器的光学像差校正(球面像差和/或色差)。处理电路响应于由相应对准特征在所接收的图像中的相应位置限定的一条或多条线的曲率来计算图像传感器的光学像差校正。
48.在一些实施方案中,光学靶被配置成围绕对准特征的中心对准特征(例如中心黑色和白色正方形的中心交叉点)旋转。处理电路接收由光学靶的图像传感器在该光学靶的相应旋转位置处捕获的相应图像。处理电路响应于相应对准特征在所接收的相应图像中的相应位置来计算图像传感器的光学像差校正。
49.本领域中描述了用于使用棋盘校正光学像差的各种方法。一个此类示例在fraunhofer institute for integrated circuits iis(am wolfsmantel 33,91058erlangen,germany)的mathis hoffmann,andreas ernst,tobias bergen,sebastian hettenkofer和jens-uwe garbas的名称为“a robust chessboard detector for geometric camera calibration”的论文中有所描述。
50.在一些实施方案中,磁场发生器包括分别与磁性坐标系的三个正交轴线对准的三个校准线圈组(例如,三个亥姆霍兹线圈)。磁场传感器还可包括三个位置线圈(例如,三轴磁性传感器)。在这些实施方案中,处理电路致动校准线圈组以生成磁场以供位置线圈检测。校准线圈组可以一个接一个致动或同时致动(如果不同的相应频率用于相应的校准线圈组)。如果磁场传感器为其线圈完全与生成的磁场对准的三轴传感器,则如果仅致动一个亥姆霍兹线圈,则在一个线圈上仅存在一个信号。如果在另一线圈上存在信号,则由处理电路使用这些其他线圈上的信号来测量这些其他线圈的未对准,并由此对于位置线圈中的每个位置线圈,响应于从位置线圈接收的信号来校准与磁性坐标系的对准。
51.在一些实施方案中,磁场传感器可包括仅一个或仅两个位置线圈(例如,单轴或双轴磁性传感器)。在这些实施方案中,处理电路校准单轴或双轴传感器与一个或多个生成的磁场的对准。
52.在一些实施方案中,处理电路响应于来自磁场传感器的一个或多个信号来计算磁场传感器的灵敏度。
53.处理电路存储计算的参数(例如,图像传感器相对于磁场传感器的对准、磁场传感器与一个或多个生成的磁场的对准、磁场传感器的灵敏度以及存储装置(诸如电可擦可编程只读存储器(eeprom))中的光学像差校正,存储装置通常包括在探针中。然后可在使用探
针期间由处理装置检索存储的参数以校正磁场传感器、图像传感器的未对准,图像传感器的像差和磁场传感器的灵敏度错配。
54.系统描述
55.以引用方式并入本文的文献将被视为本技术的整体部分,不同的是,就任何术语在这些并入文献中以与本说明书中明确或隐含地作出的定义矛盾的方式定义而言,应仅考虑本说明书中的定义。
56.现在参见图1至图3,其为根据本发明的实施方案构造和操作的探针10的示意图。探针10可以是任何合适的探针,例如导管、导丝或医疗工具,例如,ent工具。探针10包括远侧端部12、近侧端部22(以举例的方式,导丝由此延伸)和柄部24,其允许操作者经由各种操作控件26控制探针10。柄部24可包括存储装置25,例如eeprom。存储装置25可设置在探针10的任何合适部分中,例如但不限于近侧端部22。参考图11更详细地描述了存储装置的使用。
57.现在参见图2和图3。远侧端部12包括图像传感器14(诸如相机)和磁场传感器16。探针10可任选地包括其他元件,诸如一个或多个冲洗管(和/或抽吸管)18,以及一个或多个照明(照明)元件20,仅以举例的方式。远侧端部12可以是可偏转的。图2和图3示出了图像传感器14、照明元件20和冲洗管18直接或间接地连接到支撑条27,支撑条由任何合适的可偏转和弹性材料形成,例如但不限于镍钛诺或不锈钢。
58.磁场传感器16可包括多个位置线圈28,例如两个或三个位置线圈。图3示出了围绕远侧端部12的近端部分设置的两个正交设置的位置线圈28-1、28-2。位置线圈28-1、28-2中的每一个的轴线均垂直于探针的纵向轴线设置。位置线圈28-1、28-2可以为设置在远侧端部12内的缠绕线圈,或如图3所示的印刷电路板(pcb)印刷线圈(例如,印刷在柔性pcb上),或任何其他适当放置的线圈。位置线圈28-1、28-2可用于确定远侧端部12的位置和/或取向(卷绕)。
59.现在参见图4,该图是图1的探针10的远侧端部12的剖视图。图4示出了靠近图像传感器14设置的第三位置线圈28-3。位置线圈28-3被设置成其轴线平行于探针10的纵向轴线。仅以举例的方式,位置线圈28-3可以为缠绕线圈或pcb印刷线圈。位置线圈28-3可用于确定远侧端部12的位置和/或取向(排除卷绕)。应当理解,位置线圈28的定位仅以举例的方式在附图中示出。位置线圈28可以以任何合适的位置和/或取向设置在远侧端部12中。
60.现在参见图5,其为根据本发明的实施方案构造和操作的校准设备30的等轴视图。校准设备30包括磁场发生器32、夹具34、光学靶36和处理电路38。
61.磁场发生器32被配置成生成具有与夹具34对准的预定方向的至少一个时变磁场。在一些实施方案中,磁场发生器32被配置成生成对应于两个或三个正交轴线的两个或三个磁场。通常生成磁场中的每个磁场,以便在夹具34的区域内生成均匀磁场。
62.在一些实施方案中,磁场发生器包括分别与磁性坐标系44的三个正交轴线对准的三个校准线圈组40。在一些实施方案中,校准线圈组40中的每个校准线圈组包括两个线圈,例如,提供均匀磁场的亥姆霍兹线圈。亥姆霍兹线圈系统可例如从bartington instruments(oxford,england)商购获得。
63.校准线圈组40耦合至驱动电路(未示出),这使得校准线圈组40生成磁场。每个校准线圈组40生成基本上正交于由该校准线圈组40限定的平面的磁场,并且因此基本上正交于由其他两个校准线圈组40生成的场。
64.构造每个校准线圈组40以便在与夹具34的中心相邻的区域中(即,在三个位置线圈28的区域中)生成预定的基本上均匀的磁场(图3和图4)。调整驱动电路使得由三个校准线圈组40生成的相应磁场的幅度相等。
65.下文参考图11更详细地描述了处理电路38。在实施过程中,处理电路38的功能中的一些或全部功能可组合在单个物理部件中,或者另选地,使用多个物理部件来实现。这些物理部件可包括硬连线或可编程装置,或这两者的组合。在一些实施方案中,处理电路的功能中的至少一些功能可由可编程处理器在合适软件的控制下实施。该软件可以通过(例如)网络以电子形式下载到装置中。另选地或除此之外,该软件可以储存在有形的非暂态计算机可读存储介质中,诸如光学、磁或电子存储器。
66.现在参见图6和图7。图6为图5的校准设备30的前视图。图7为图5的校准设备30的侧视图。
67.夹具34被配置成保持探针10的远侧端部12。将夹具34固定至校准线圈组40中的一者,并且与磁性坐标系44的轴线对准。夹具34可包括夹具组件,该夹具组件被构造和配置成使得探针10的远侧端部12保持在夹具34中在与该夹具34的中心相邻的基本上均匀的磁场区域中,并且使得探针10的长轴将基本上正交于由校准线圈组40中的校准线圈组限定的平面。夹具34包括相应的半圆形凹槽,其半径基本上等于探针10的远侧端部12的外半径。
68.夹具34可包括加热元件(未示出)和至少一个温度传感器(未示出),其用于将探针10的远侧端部12加热至基本上等于探针10待插入的身体温度的温度,并且在校准期间将该远侧端部12维持在该温度。如本领域已知的,位置线圈28(图3、4)对磁场的响应可根据温度而变化。例如,当线圈围绕铁氧体磁芯缠绕时,其电感可随温度而改变,这可将误差引入磁场传感器16的校准中(图3、图4)。因此,在校准期间通常将远侧端部12加热至并维持在37℃的温度,但是例如当探针10待在低温条件下(诸如通常在心脏直视手术期间所引起的)使用时,可选择其他温度。
69.将探针10插入夹具34中,并且围绕其长轴旋转至期望的旋转取向,其中位置线圈28的轴线(图3和图4)基本上与由相应校准线圈组40所限定的磁性坐标系44的相应轴线对准。期望的旋转取向可例如通过探针10外表面上的基准标记或其他特征(图中未示出)来指示。以这种方式,探针10相对于由校准线圈组40生成的磁场在已知的取向上固定。探针10还连接至处理电路38。
70.然后通过顺序激活校准线圈组40以生成预定的已知磁场,并测量由位置线圈28生成的信号的幅度来校准位置线圈28的相应增益和角度取向。
71.首先,为了校准位置线圈28的增益(灵敏度),通过对由位置线圈28中的每个位置线圈响应于校准线圈组40中的每个校准线圈组依次生成的信号幅度的平方进行求和来导出相应位置线圈信号的总幅度。由于位置线圈28附近的磁场沿位置线圈28的轴线中的每个轴线具有相等且基本上均匀的分量,因此总信号幅度将独立于位置线圈28的相应取向和位置,并且将仅取决于相应的线圈增益。因此,通过将测量的幅度除以预期的标准值,可使用测量的总信号幅度来确定位置线圈28的相应归一化因子。随后,可将从这些线圈接收的信号的幅度乘以相应归一化因子,以便校正增益变化。
72.由位置线圈28中的每个位置线圈响应于磁场中的每个磁场所生成的信号的归一化幅度将与位置线圈28的相应轴线和所施加的磁场方向之间的角度的余弦成比例。因此,
对于位置线圈28中的每个位置线圈,可导出对应于由校准线圈组40施加的三个正交磁场的方向的三个此类角度的余弦。由于如上所述,探针10以使得该探针10的轴线基本上与磁性坐标系44的三个正交磁场方向对准这样的方式保持在夹具34中,因此可确定位置线圈28相对于探针10的轴线的取向。
73.在本发明的一些实施方案中,当激活z-轴磁场时,接收并测量从位置线圈28-3(图4)接收的信号的归一化幅度。类似地激活x轴场和y轴场,并且从位置线圈28-3接收对应的归一化信号。接收的信号用于计算位置线圈28-3的线圈角度校准因子,其之后被记录在探针10中并用于确定探针的位置和取向。类似的程序用于校准线圈28-1、28-2(图3)。
74.光学靶36也与夹具34对准,使得探针10中的图像传感器14能够在探针10被保持在夹具34中时捕获光学靶36的图像。光学靶36包括多个对准特征46(为了简单起见,仅一些被标记)。在一些实施方案中,光学靶36包括多个交替的矩形(例如,正方形)黑色和白色(或者较暗和较亮的)部分,类似于国际象棋盘或跳棋盘。在其他实施方案中,可使用单个合适形状的对准特征,例如,十字,代替棋盘图案。在其他实施方案中,可使用其他合适形状的对准技术。
75.在一些实施方案中,对准特征46可包括中心对准特征48,该中心对准特征基本上居中设置在光学靶36中,使得中心对准特征48与探针10的远侧端部12的中心纵向轴线的x和y位置基本上对准(用虚线52指示)。
76.在一些实施方案中,光学靶36被配置成例如使用围绕z轴的轴承50围绕中心对准特征48旋转。光学靶36的旋转运动可使用马达(未示出)来控制,该马达可由处理电路38控制。光学靶36的相应图像可由图像传感器14在光学靶36的相应旋转位置处捕获。
77.基于一个或多个所捕获的图像来执行图像传感器14的位置和取向的校准以及光学像差的校正,如参考图8至图11更详细地描述的。
78.现在参见图8,其为在图5的校准设备30中分析的所捕获的图像54的示意图。
79.处理电路38(图5至图7)被配置成:例如但不限于使用图像处理技术,诸如边缘检测,在所捕获的图像54中找到与多个对准特征46(为简单起见,仅一些被标记)中的相应对准特征相对应的相应矩形(例如,正方形)部分之间的相应边界。圆形56(为简单起见,仅一些被标记)围绕在矩形部分之间找到的边界(检测到的点)居中。该边界可用于基于以下各项来校准图像传感器14(图3、图4),例如相对于磁场传感器16(图3、图4)的对准:中心对准特征48在所捕获的图像54中的位置和/或对准特征46在所捕获的图像54中的位置和取向;光学靶36的对准特征46(图6、图7)和磁性坐标系44(由校准线圈组40(图6、图7)生成的磁场限定)之间的给定空间关系;夹具34(图6、图7)和光学靶36的对准特征46之间的给定空间关系;图像传感器14的光学特性;以及任选地,磁场传感器16与磁性坐标系44之间的对准。上述对图像传感器14的对准的校准可基于对于光学像差进行校正的所捕获的图像54中的对准特征46的校正位置,如下文参考图9所述的。
80.现在参见图9,其为示出图5的校准设备30中的光学像差校正方法的示意图。如上文参考图8所述,圆形56围绕对准特征46的矩形部分之间的边界居中(图8)。如果图像传感器14不含光学缺陷,则所捕获的图像54(图8)将包括对准特征46,其与光学靶36上包含的完全相同,具有正确的定位、间距和取向。具体地讲,由圆形56的中心限定的线(为简单起见,仅一些被标记)将是直的、平行且等间距的。相反,由图9中的圆形56的中心限定的线不是直
的、平行的和等间距的。图9还示出了十字58(为简单起见,仅一些被标记),基于光学靶36的对准特征46的几何形状,所述十字的中心限定直的、平行且等间距的线。十字58的图案围绕所捕获的图像54的中心居中。相应圆形56的中心与相应十字58的中心之间的位移限定图像传感器14的光学像差(例如,球面像差)校正,并且可任选地用于校准图像传感器14与磁场传感器16的对准。可针对光学靶36的不同旋转位置重复上述处理。光学靶36的旋转位置不需要被处理电路38知道以便执行光学像差校正。基于对所捕获的图像54的合适分析,可使用本领域技术人员已知的方法来计算其他光学像差校正,诸如色差校正。
81.现在参见图10,其为图5的校准设备30中的另一所捕获的图像60的示意图。当光学靶36旋转时对所捕获的图像60进行捕获,使得光学靶36的侧面不与磁性坐标系44的x轴和y轴对准(图6、图7)。所捕获的图像60清楚地示出由对准特征46限定的线不是直的、平行且等间距的线,并且因此,图像传感器14表现出球面像差。
82.现在参见图11,其为包括图5的校准设备30中的操作方法中的步骤的流程图70。还参见图6和图7。
83.探针10设置(框72)在夹具34中,如上文参考图6和图7所述的。处理电路38被配置成致动(框74)磁场发生器32的校准线圈组40以使用该校准线圈组40生成磁场。当探针10被保持在夹具34中时,由位置线圈28检测生成的磁场(图3和图4)。继而,校准线圈组40可如上文参考图6或图7所述的进行致动,或者如果不同的相应频率用于不同的相应校准线圈组40(即,第一校准线圈组40生成第一频率,第二校准线圈组40生成第二频率,且第三校准线圈组40生成第三频率),则校准线圈组40可同时进行致动。
84.处理电路38被配置成致动(框76)探针10的图像传感器14以在探针10被保持在夹具34中时捕获光学靶36的图像。
85.处理电路38任选地被配置成致动马达(未示出)以将光学靶36旋转(框78)至新旋转位置。在新旋转位置处重复框76的步骤。可重复框76和框78的步骤任何合适的次数。增加用于校准图像传感器14的图像数可改善图像传感器14的校准的准确性。
86.处理电路38被配置成从探针接收(框80)以下各项:由磁场传感器16(从位置线圈28)响应于一个或多个磁场输出的信号(或多个信号);以及当探针10被保持在夹具34中时,由光学靶36的图像传感器14捕获的一个或多个图像(例如,在光学靶36的多个相应旋转位置处)。
87.每个接收的图像包括多个对准特征46中的至少一些对准特征。在一些实施方案中,处理电路38被配置成找到与多个对准特征46中的相应对准特征相对应的相应矩形部分之间的相应边界,如上文参考图8所述的。矩形部分中的一些矩形部分之间的中心边界与中心对准特征48相对应。
88.处理电路38被配置成响应于接收的信号、接收的图像和其他因素来校准(框82)图像传感器14相对于磁场传感器16的对准,其他因素例如但不限于,中心对准特征48在搜捕获的图像54中的位置(图8)和/或对准特征46在所捕获的图像54中的位置和取向,光学靶36的对准特征46与磁性坐标系44(由校准线圈组40所生成的磁场限定)之间的给定空间关系,夹具34与光学靶36的对准特征46之间的给定空间关系,图像传感器14的光学特性,以及任选地磁场传感器16与磁性坐标系44之间的对准。上述对图像传感器14的对准的校准可基于对于光学像差进行校正的所捕获的图像54中的对准特征46的校正位置,如下文参考图9所
述的。
89.处理电路38被配置成响应于至少一些对准特征46中的相应对准特征在所接收的图像中的相应位置来计算(框84)该图像传感器14的光学像差校正。在一些实施方案中,处理电路38被配置成响应于由至少一些对准特征46中的相应对准特征在所接收的图像中的相应位置限定的至少一条线的曲率来计算图像传感器的光学像差校正。
90.在一些实施方案中,当多个相应图像在光学靶36的多个旋转位置处被捕获时,处理电路38被配置成响应于对准特征46中的相应对准特征在所接收的相应图像中的相应位置来计算图像传感器14的光学像差校正。
91.处理电路被配置成校准(框86)磁场传感器16与一个或多个磁场的对准,该磁场由磁场传感器32响应于一个或多个从磁场传感器16接收的信号而生成,如上文参考图6和图7所述的。在一些实施方案中,处理电路38被配置成对于位置线圈28(图3、图4)中的每个位置线圈,响应于从位置线圈28接收的信号来校准与磁性坐标系44的对准。
92.处理电路38被配置成响应于一个或多个从磁场传感器16接收的信号来计算(框88)磁场传感器16的灵敏度,如参考图6和图7更详细地描述的。
93.处理电路被配置成在探针10中所包括的存储装置25(图1)中,存储(框90)图像传感器14相对于磁场传感器16的对准,磁场传感器16与由磁场发生器32生成的一个或多个磁场的对准,以及磁场传感器16的灵敏度。
94.然后从夹具34移除(框92)探针10。
95.如果需要,本发明的软件组件可以rom(只读存储器)形式实施。如果需要,软件组件通常可使用常规技术在硬件中实施。软件组件可以被实例化,例如:作为计算机程序产品或在有形介质上。在一些情况下,可将软件组件实例化为可通过适当的计算机判读的信号,但在本发明的某些实施方案中可排除此类实例化。
96.为清晰起见,在独立实施方案的上下文中描述的本发明的各种特征部也可在单个实施方案中组合提供。相反地,为简明起见,本发明的各种特征部在单个实施方案的上下文中进行描述,也可单独地或以任何合适的子组合形式提供。
97.上述实施方案以举例的方式被引用,并且本发明不受上文具体示出和描述的内容的限制。相反,本发明的范围包括上述各种特征部的组合和子组合以及它们的变型和修改,本领域的技术人员在阅读上述说明时应当想到该变型和修改,并且该变型和修改并未在现有技术中公开。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。