管理系统、管理方法、以及管理程序
1.相关申请的交叉引用
2.本技术基于2019年10月29日申请的日本技术2019-196062号,在此引用其记载内容。
技术领域
3.本公开涉及管理系统、管理方法、以及管理程序。
背景技术:
4.以往,提出了由自动驾驶车、和经由网络与该自动驾驶车进行通信的远程监视中心构成的远程监视系统(参照专利文献1)。
5.在该远程监视系统中,由自动驾驶车进行以下控制,即,在与远程监视中心之间的通信断绝的情况下使该自动驾驶车自动停止,并且将相机影像发送至远程监视中心,该自动停止之后,在从远程监视中心接收到起步信号的情况下,使该自动驾驶车的行驶重新开始。
6.另外,在该远程监视系统中,在上述自动驾驶车已自动停止的情况下,由远程监视中心基于接收到的相机影像判断是否可以使该自动驾驶车的行驶重新开始,在判定为可以使该自动驾驶车的行驶重新开始的情况下,向该自动驾驶车发送起步信号。
7.专利文献1:日本特开2019-87015号公报
8.发明者的详细研究的结果是,在上述专利文献1所公开的技术中发现了以下课题,即,由于每当自动驾驶车与远程监视中心之间的通信断绝时自动驾驶车的运行就停止,因此自动驾驶协助服务的连续性受到损害。
9.另外,发明者也在上述专利文献1所公开的技术中发现了以下课题,即,由于每当自动驾驶车与远程监视中心之间的通信断绝就在自动驾驶协助服务中联络协助自动驾驶车的操作人员、当地工作人员等协助者,因此导致花费于该服务的成本的上升。
技术实现要素:
10.本公开的目的在于能够抑制自动驾驶协助服务的连续性的降低,并且抑制花费于自动驾驶协助服务的成本的上升。
11.本公开所涉及的管理系统是通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理上述自动驾驶车的车辆状态的管理系统,能够构成为包含:车辆侧装置,设置于上述自动驾驶车,且具备车辆侧决定部,该车辆侧决定部在与上述自动驾驶协助中心的通信断绝的情况下,基于表示上述管理系统的管理对象区域内的上述自动驾驶车能够行驶的各位置上的上述自动驾驶协助中心与上述自动驾驶车之间的通信的状况的信息亦即通信状况信息来决定是否继续自动驾驶;以及中心侧装置,设置于上述自动驾驶协助中心,并具备中心侧决定部,该中心侧决定部在与上述自动驾驶车的通信断绝的情况下,基于上述通信状况信息决定是否联络进行对上述自动驾驶车的协助的协助者。
12.另外,本公开所涉及的管理方法是在通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理上述自动驾驶车的车辆状态的管理系统中使用的管理方法,其中,在上述自动驾驶协助中心与上述自动驾驶车的通信断绝的情况下,基于表示上述管理系统的管理对象区域内的上述自动驾驶车能够行驶的各位置上的上述自动驾驶协助中心与上述自动驾驶车之间的通信的状况的信息亦即通信状况信息,来决定是否继续自动行驶、以及是否联络进行对上述自动驾驶车的协助的协助者。
13.另外,本公开所涉及的管理程序是在通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理上述自动驾驶车的车辆状态的管理系统中使用的管理程序,其中用于使计算机执行以下处理:在上述自动驾驶协助中心与上述自动驾驶车的通信断绝的情况下,基于表示上述管理系统的管理对象区域内的上述自动驾驶车能够行驶的各位置上的上述自动驾驶协助中心与上述自动驾驶车之间的通信的状况的信息亦即通信状况信息,来决定是否继续自动行驶、以及是否联络进行对上述自动驾驶车的协助的协助者。
14.根据本公开所涉及的管理系统、管理方法、以及管理程序,能够抑制自动驾驶协助服务的连续性的降低,并且抑制花费于自动驾驶协助服务的成本的上升。
附图说明
15.通过参照附图下述的详细的记述,本公开的上述目的以及其它的目的、特征、优点变得更加明确。该附图如下。
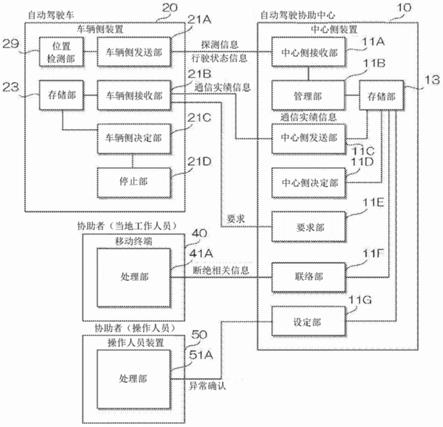
16.图1是示出第一~第三实施方式所涉及的管理系统的硬件结构的一个例子的框图。
17.图2是示出第一~第三实施方式所涉及的管理系统的功能性结构的一个例子的框图。
18.图3是示出实施方式所涉及的通信状况信息数据库的结构的一个例子的示意图。
19.图4是用于说明实施方式所涉及的通信状况信息数据库中包含的通信实绩信息的俯视图。
20.图5是用于说明实施方式所涉及的通信状况信息数据库中包含的不稳定区域信息的俯视图。
21.图6是示出实施方式所涉及的车辆侧通信处理的一个例子的流程图。
22.图7是示出实施方式所涉及的中心侧通信处理的一个例子的流程图。
23.图8是示出第一~第三实施方式所涉及的通信状况信息发送处理的一个例子的流程图。
24.图9是示出第一~第三实施方式所涉及的通信状况信息接收处理的一个例子的流程图。
25.图10是示出第一、第三实施方式所涉及的车辆侧通信断绝处理的一个例子的流程图。
26.图11是用于说明实施方式所涉及的车辆侧以及中心侧通信断绝处理的俯视图。
27.图12是用于说明实施方式所涉及的车辆侧以及中心侧通信断绝处理的俯视图。
28.图13是示出第一、第二、第四实施方式所涉及的中心侧通信断绝处理的一个例子的流程图。
29.图14是示出实施方式所涉及的当地工作人员提供画面的一个例子的主视图。
30.图15是示出第二实施方式所涉及的车辆侧通信断绝处理的一个例子的流程图。
31.图16是用于说明第二实施方式所涉及的车辆侧通信断绝处理的俯视图。
32.图17是示出第三实施方式所涉及的中心侧通信断绝处理的一个例子的流程图。
33.图18是用于说明第三实施方式所涉及的中心侧通信断绝处理的俯视图。
34.图19是示出第四实施方式所涉及的管理系统的硬件结构的一个例子的框图。
35.图20是示出第四实施方式所涉及的管理系统的功能性结构的一个例子的框图。
36.图21是示出第四实施方式所涉及的通信状况信息发送处理的一个例子的流程图。
37.图22是示出第四实施方式所涉及的通信状况信息接收处理的一个例子的流程图。
38.图23是示出第四实施方式所涉及的车辆侧通信断绝处理的一个例子的流程图。
具体实施方式
39.以下,参照附图,对用于实施本公开的技术的方式例详细地进行说明。
40.[第一实施方式]
[0041]
首先,参照图1以及图2,对本实施方式所涉及的管理系统90的结构进行说明。本实施方式所涉及的管理系统90通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理该自动驾驶车的车辆状态。作为一个例子,如图1所示,本实施方式所涉及的管理系统90包含分别能够访问网络80的中心侧装置10、多个车辆侧装置20、多个移动终端40、以及操作人员装置50。此外,作为中心侧装置10、车辆侧装置20以及操作人员装置50的例子,可举出个人计算机以及服务器计算机等通用的信息处理装置。另外,作为移动终端40的例子,可举出智能手机、平板终端、pda(personal digital assistant,移动信息终端)、笔记本型个人计算机等便携式且能够无线通信的终端。
[0042]
本实施方式所涉及的中心侧装置10是运营管理系统90的自动驾驶协助中心所管理的装置。中心侧装置10具备cpu(central processing unit:中央处理单元)11、作为暂时存储区域的存储器12、非易失性的存储部13、键盘和鼠标等输入部14、液晶显示器等显示部15、介质读写装置(r/w)16以及通信接口(i/f)部18。cpu11、存储器12、存储部13、输入部14、显示部15、介质读写装置16以及通信i/f部18经由总线b1相互连接。介质读写装置16进行写入至记录介质17的信息的读出以及向记录介质17的信息的写入。
[0043]
存储部13由hdd(hard disk drive)、ssd(solid state drive)、闪存等实现。在作为存储介质的存储部13存储有中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c。将写入了中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c的记录介质17设置于介质读写装置16,且介质读写装置16进行来自记录介质17的中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c的读出,从而向存储部13存储中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c。cpu11将中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c从存储部13读出并在存储器12中展开,依次执行中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c分别具有的工序。
[0044]
另外,在存储部13存储通信状况信息数据库13d。关于通信状况信息数据库13d,详细内容后述。
[0045]
另一方面,本实施方式所涉及的车辆侧装置20是搭载于使用自动驾驶协助服务的各个自动驾驶车的装置。车辆侧装置20具备cpu21、作为暂时存储区域的存储器22、非易失性的存储部23、键盘和鼠标等输入部24、液晶显示器等显示部25、介质读写装置26、无线通信部28以及位置检测部29。cpu21、存储器22、存储部23、输入部24、显示部25、介质读写装置26、无线通信部28以及位置检测部29经由总线b2相互连接。介质读写装置26进行写入至记录介质27的信息的读出以及向记录介质27的信息的写入。
[0046]
存储部23由hdd、ssd、闪存等实现。在作为存储介质的存储部23存储有车辆侧通信程序23a、通信状况信息接收程序23b以及车辆侧通信断绝程序23c。通过将写入了车辆侧通信程序23a、通信状况信息接收程序23b以及车辆侧通信断绝程序23c的记录介质27设置于介质读写装置26,且介质读写装置26进行来自记录介质27的车辆侧通信程序23a、通信状况信息接收程序23b以及车辆侧通信断绝程序23c的读出,从而向存储部23存储。cpu21将车辆侧通信程序23a、通信状况信息接收程序23b以及车辆侧通信断绝程序23c从存储部23读出并在存储器22中展开,依次执行车辆侧通信程序23a、通信状况信息接收程序23b以及车辆侧通信断绝程序23c所具有的工序。
[0047]
位置检测部29检测所搭载于的自动驾驶车的位置,在本实施方式中,应用gps(global positioning system)装置,但不限于此。只要能够检测自身的位置,则任何装置都能够作为位置检测部29来应用。
[0048]
另一方面,本实施方式所涉及的移动终端40是部署在管理系统90的管理对象区域内的各地的当地工作人员所持有的装置。移动终端40具备cpu41、作为暂时存储区域的存储器42、非易失性的存储部43、触摸面板等输入部44、液晶显示器等显示部45以及无线通信部48。cpu41、存储器42、存储部43、输入部44、显示部45以及无线通信部48经由总线b4相互连接。存储部43由hdd、ssd、闪存等实现。
[0049]
并且,本实施方式所涉及的操作人员装置50是作为实施自动驾驶协助服务中的各种服务的人员的操作人员所操作的装置。操作人员装置50具备cpu51、作为暂时存储区域的存储器52、非易失性的存储部53、键盘和鼠标等输入部54、液晶显示器等显示部55以及通信i/f部58。cpu51、存储器52、存储部53、输入部54、显示部55以及通信i/f部58经由总线b5相互连接。存储部53由hdd、ssd、闪存等实现。
[0050]
此外,上述当地工作人员以及上述操作人员均是进行对自动驾驶车的协助的人,因此以下将这些人统称为“协助者”。
[0051]
接下来,参照图2,对本实施方式所涉及的管理系统90中包含的各装置的功能性结构进行说明。
[0052]
如图2所示,本实施方式所涉及的中心侧装置10包含中心侧接收部11a、管理部11b、中心侧发送部11c、中心侧决定部11d、要求部11e、联络部11f以及设定部11g。中心侧装置10的cpu11通过执行中心侧通信程序13a、通信状况信息发送程序13b以及中心侧通信断绝程序13c,从而作为中心侧接收部11a、管理部11b、中心侧发送部11c、中心侧决定部11d、要求部11e、联络部11f以及设定部11g发挥功能。
[0053]
另一方面,本实施方式所涉及的车辆侧装置20包含车辆侧发送部21a、车辆侧接收部21b、车辆侧决定部21c以及停止部21d。车辆侧装置20的cpu21通过执行车辆侧通信程序23a、通信状况信息接收程序23b以及车辆侧通信断绝程序23c,从而作为车辆侧发送部21a、
车辆侧接收部21b、车辆侧决定部21c以及停止部21d发挥功能。
[0054]
本实施方式所涉及的车辆侧决定部21c在与自动驾驶协助中心的通信断绝的情况下,基于表示管理系统90的管理对象区域内的自动驾驶车能够行驶的各位置上的自动驾驶协助中心与自动驾驶车之间的通信的状况的信息亦即通信状况信息,决定是否继续自动驾驶。
[0055]
与此相对的,本实施方式所涉及的中心侧决定部11d在与自动驾驶车的通信断绝的情况下,基于通信状况信息决定是否联络进行对自动驾驶车的协助的协助者。
[0056]
此外,在本实施方式所涉及的自动驾驶协助服务中,以规定期间(作为一个例子,0.5秒)间隔始终进行中心侧装置10与车辆侧装置20之间的通信,将该规定期间间隔下的通信连续断绝规定次数(作为一个例子,10次)以上的状态设为通信断绝的状态。但是,不限于该方式,也可以将虽然中心侧装置10与车辆侧装置20之间的通信持续进行,但从发送至接收的时间产生规定期间(作为一个例子,3秒)以上的延迟的状态设为通信断绝的状态,也可以将接收到的信息产生丢失的状态设为通信断绝的状态。
[0057]
另一方面,本实施方式所涉及的车辆侧发送部21a将包含表示自身所在的自动驾驶车的行驶位置的位置信息(在本实施方式中,纬度以及经度的各信息)、和表示该时间点的时刻的时刻信息的探测信息发送至中心侧装置10。此外,在本实施方式中,从位置检测部29取得上述位置信息。另外,在本实施方式中,从内置于cpu21的时钟部取得上述时刻信息。这样,在本实施方式中,在探测信息中包含位置信息以及时刻信息双方,但对于时刻信息,并不必须包含于探测信息。
[0058]
与此相对的,本实施方式所涉及的中心侧接收部11a接收由车辆侧发送部21a发送出的探测信息,管理部11b将由中心侧接收部11a接收到的探测信息中包含的位置信息作为通信成功的通信实绩信息进行管理。而且,本实施方式所涉及的中心侧发送部11c将由管理部11b管理的通信实绩信息发送至车辆侧装置20。
[0059]
在本实施方式中,上述通信状况信息设为包含上述通信实绩信息。因此,车辆侧决定部21c能够使用通信实绩信息决定是否继续自动驾驶,中心侧决定部11d也能使用通信实绩信息决定是否联络协助者。
[0060]
另外,在本实施方式中,通信状况信息包含不稳定区域信息,该不稳定区域信息是表示能够根据管理系统90的管理对象区域内的地理信息判断出的自动驾驶协助中心与自动驾驶车之间的通信变得不稳定的区域的信息。因此,车辆侧决定部21c能够也使用不稳定区域信息决定是否继续自动驾驶,中心侧决定部11d也能够也使用不稳定区域信息决定是否联络协助者。
[0061]
这里,本实施方式所涉及的车辆侧决定部21c基于自身所在的自动驾驶车的行驶路线以及通信状况信息,导出预计为断绝的通信恢复的期间亦即车辆侧预计期间,导出的车辆侧预计期间为预先决定的期间以内的情况下,决定为继续自动驾驶。此外,在本实施方式中,作为上述预先决定的期间,应用从过去的实绩信息导出的期限作为若为该期间以内则即使继续自动行驶也不会产生问题的期间,但不限于此。例如,也可以为根据在本自动驾驶协助服务中能够花费于当地工作人员的成本、本自动驾驶协助服务所要求的连续性等,来使中心侧装置10的操作者等预先设定上述期间的方式等。
[0062]
并且,本实施方式所涉及的停止部21d在与中心侧装置10之间的通信断绝的状态
下继续自动行驶的情况,且即使到达该通信的恢复预计地点该通信也不恢复的情况下,使该自动行驶停止。
[0063]
另一方面,本实施方式所涉及的中心侧决定部11d基于通信断绝的自动驾驶车的行驶路线以及通信状况信息,导出预计为断绝的通信恢复的期间亦即中心侧预计期间,在导出的中心侧预计期间为预先决定的期间以内的情况下,决定为不联络协助者。另外,本实施方式所涉及的中心侧决定部11d在即使经过中心侧预计期间与自动驾驶车的通信也不恢复的情况下,决定为联络协助者。
[0064]
而且,在中心侧决定部11d在决定为不联络协助者后决定为联络协助者的情况下,本实施方式所涉及的联络部11f向该协助者联络包含与自动驾驶车的通信断绝的地点、以及认为在断绝期间自动驾驶车行驶过的路径双方的断绝相关信息。这样,在本实施方式中,作为向协助者联络的断绝相关信息,应用包含与自动驾驶车的通信断绝的地点以及认为在断绝期间自动驾驶车行驶过的路径双方的信息,但不限于此。也可以为作为向协助者联络的断绝相关信息,应用仅包含与自动驾驶车的通信断绝的地点以及认为在断绝期间自动驾驶车行驶过的路径的任意一方的信息的方式。
[0065]
另一方面,在与通信断绝的自动驾驶车的通信恢复的情况下,本实施方式所涉及的要求部11e向该自动驾驶车要求表示该通信断绝的期间中的该自动驾驶车的行驶状态的行驶状态信息。根据该要求,自动驾驶车将行驶状态信息发送至中心侧装置10。
[0066]
另外,本实施方式所涉及的设定部11g使协助者确认在根据来自要求部11e的要求而从自动驾驶车得到的行驶状态信息所示的行驶状态中是否存在异常,在没有异常的情况下,进行将在通信断绝的期间中该自动驾驶车行驶过的区间亦即通信断绝区间包含于示出自动驾驶协助中心与自动驾驶车之间的通信变得不稳定的区域的信息亦即不稳定区域信息的设定。
[0067]
另一方面,本实施方式所涉及的移动终端40包含处理部41a,操作人员装置50包含处理部51a。移动终端40的cpu41通过执行预先存储于存储部43的程序从而作为处理部41a发挥功能,操作人员装置50的cpu51通过执行预先存储于存储部53的程序从而作为处理部51a发挥功能。
[0068]
接下来,参照图3,对本实施方式所涉及的通信状况信息数据库13d进行说明。
[0069]
如图3所示,本实施方式所涉及的通信状况信息数据库13d针对每个表示管理系统90的管理对象区域内的各位置的位置信息,存储表示对应的位置信息所示的位置上的通信状况的通信相关信息。在本实施方式所涉及的管理系统90中,俯视管理系统90的管理对象区域,将该俯视的管理对象区域矩阵状地划分为预先决定的形状以及尺寸的多个划分区域。而且,在本实施方式所涉及的管理系统90中,与将对应的通信相关信息(在本实施方式中,通信时间信息以及地理通信信息的各信息)与表示各划分区域的位置(在本实施方式中,划分区域的俯视中心位置)的位置信息建立关联地存储。此外,在本实施方式中,作为上述划分区域的形状应用正方形,作为上述尺寸应用20m
×
20m,但不言自明地,并不限定于这些形状以及尺寸。
[0070]
在本实施方式所涉及的管理系统90中,视为在通过中心侧接收部11a从自动驾驶车接收到的探测信息中包含的位置信息所示的位置与自动驾驶车的通信良好地进行,将该探测信息中包含的时刻信息作为通信时间信息,与对应的位置信息建立关联地存储。此外,
在探测信息中不包含时刻信息的情况下,在中心侧装置10中,在接收到探测信息的定时从内置于中心侧装置10的cpu11的时钟部取得表示该时间点的时刻的时刻信息并应用即可。
[0071]
因此,通过参照该通信时间信息与位置信息的组合,作为一个例子,如图4所示,能够掌握自动驾驶车行驶的状态下的中心侧装置10与车辆侧装置20之间的通信实绩。通信状况信息数据库13d的位置信息与通信时间信息的组合相当于上述的通信实绩信息。
[0072]
另外,在本实施方式所涉及的管理系统90中,作为一个例子,如图5所示,与表示隧道、高架下等这样的中心侧装置10与车辆侧装置20之间的通信地理性地变得不稳定的位置的位置信息建立关联地,将表示通信地理性地不稳定的信息作为地理通信信息存储于通信状况信息数据库13d。另外,在本实施方式所涉及的管理系统90中,与表示中心侧装置10与车辆侧装置20之间的通信未地理性地变得不稳定的位置的位置信息建立关联地,将表示通信地理性地稳定的信息作为地理通信信息存储于通信状况信息数据库13d。此外,在本实施方式中,作为一个例子,如图3所示,作为上述表示通信地理性地不稳定的信息应用“不稳定”这一信息,作为上述表示通信未地理性地不稳定的信息应用“普通”这一信息,但不言自明地,并不限于这些信息。
[0073]
因此,通过参照该地理通信信息与位置信息的组合,能够掌握自动驾驶车行驶的状态下的中心侧装置10与车辆侧装置20之间的通信是否地理性地稳定。通信状况信息数据库13d的位置信息与地理通信信息的组合相当于上述的不稳定区域信息。
[0074]
以下,将登记至通信状况信息数据库13d的信息统称为“通信状况信息”。
[0075]
接下来,参照图6~图14,对本实施方式所涉及的管理系统90的作用进行说明。此外,为了避免混淆,这里,对预先登记有通信状况信息数据库13d中的位置信息以及地理通信信息的情况进行说明。
[0076]
首先,参照图6,作为本实施方式所涉及的车辆侧装置20的作用,对执行车辆侧通信处理的情况的车辆侧装置20的作用进行说明。通过搭载于任意自动驾驶车的车辆侧装置20的cpu21执行车辆侧通信程序23a,来执行图6所示的车辆侧通信处理。图6所示的车辆侧通信处理例如在搭载了车辆侧装置20的自动驾驶车开始自动行驶的情况下执行。
[0077]
在图6的步骤100中,车辆侧发送部21a等待直到经过规定时间(在本实施方式中,0.5秒),在接下来的步骤102中,车辆侧发送部21a从位置检测部29取得表示本车的位置的位置信息。在接下来的步骤104中,车辆侧发送部21a取得表示该时间点的时刻的时刻信息,在接下来的步骤106中,车辆侧发送部21a将取得的位置信息以及时刻信息包含于探测信息,经由无线通信部28以及网络80发送至中心侧装置10。此外,在本实施方式中,如上述那样,从内置于cpu21的时钟部取得上述时刻信息,但不言自明地,并不限于此。
[0078]
在接下来的步骤108中,车辆侧发送部21a判定预先决定的结束定时是否已到来,在否定判定的情况下返回步骤100,另一方面,在肯定判定的时间点结束本车辆侧通信处理。此外,在本实施方式中,作为上述结束定时,应用探测到自动驾驶车的点火开关截断的定时,但不限于此。例如,也可以为将从中心侧装置10经由无线通信部28接收到以指示车辆侧通信处理的结束为主旨的指示信息的定时等设为上述结束定时的方式。
[0079]
接下来,参照图7,作为本实施方式所涉及的中心侧装置10的作用,对执行中心侧通信处理的情况的中心侧装置10的作用进行说明。通过中心侧装置10的cpu11执行中心侧通信程序13a,从而执行图7所示的中心侧通信处理。图7所示的中心侧通信处理例如在成为
作为自动驾驶协助服务开始服务的时刻而预先决定的时刻(作为一个例子,四点)的情况下执行。
[0080]
在图7的步骤500中,中心侧接收部11a等待直到从任意自动驾驶车接收到探测信息,在接下来的步骤502中,管理部11b等待直到经过规定时间(在本实施方式中,2秒)。在接下来的步骤504中,管理部11b将接收到的探测信息中包含的时刻信息作为与该探测信息中包含的位置信息对应的通信时间信息,存储(登记)于通信状况信息数据库13d的对应的存储区域。通过对各自动驾驶车以规定时间间隔将探测信息作为通信状况信息进行登记,能够减少通信状况信息数据库13d的容量。
[0081]
在接下来的步骤506中,管理部11b判定预先决定的结束定时是否已到来,在否定判定的情况下返回步骤500,另一方面,在肯定判定的时间点结束本中心侧通信处理。此外,在本实施方式中,作为上述结束定时,应用作为自动驾驶协助服务结束服务的时刻而预先决定的时刻(作为一个例子,一点)这一定时,但不限于此。例如,也可以为将由中心侧装置10的管理者经由通信i/f部18输入以指示中心侧通信处理的结束为主旨的指示信息的定时等设为上述结束定时的方式。
[0082]
接下来,参照图8,作为本实施方式所涉及的中心侧装置10的作用,对执行通信状况信息发送处理的情况的中心侧装置10的作用进行说明。通过中心侧装置10的cpu11执行通信状况信息发送程序13b,从而执行图8所示的通信状况信息发送处理。图8所示的通信状况信息发送处理例如在成为作为自动驾驶协助服务开始服务的时刻而预先决定的时刻(作为一个例子,四点)的情况下执行。
[0083]
在图8的步骤600中,中心侧发送部11c等待直到作为将通信状况信息发送至自动驾驶车的定时而预先决定的定时到来。在本实施方式中,作为上述预先决定的定时,应用每隔规定时间(作为一个例子,1分钟)的定时,但不言自明地,并不限于此。
[0084]
在接下来的步骤602中,中心侧发送部11c从通信状况信息数据库13d读出全部的通信状况信息。在接下来的步骤604中,中心侧发送部11c从读出的通信状况信息提取与发送目的地的自动驾驶车的行驶位置对应、并且从该时间点回溯并直到规定时间(作为一个例子,10分钟)前为止的信息(以下,称为“对应通信状况信息”。)。这里,对于通信状况信息中的地理通信信息,由于没有时间的概念,因此提取与发送目的地的自动驾驶车的行驶位置对应的全部的信息。然后,中心侧发送部11c将提取出的对应通信状况信息经由通信i/f部18以及网络80发送至该自动驾驶车。此外,在本实施方式中,作为与发送目的地的自动驾驶车的行驶位置对应的信息,应用关于对应的自动驾驶车的行驶位置的周围的规定范围(作为一个例子,半径1km)内的信息,但不限于此。例如,作为对应通信状况信息,也可以为应用登记至通信状况信息数据库13d的全部的通信状况信息的方式,也可以为应用仅与发送目的地的自动驾驶车的行驶路线对应的通信状况信息的方式等。
[0085]
在接下来的步骤606中,中心侧发送部11c判定预先决定的结束定时是否已到来,在否定判定的情况下返回步骤600,另一方面,在肯定判定的时间点结束本通信状况信息发送处理。此外,在本实施方式中,作为上述结束定时,应用作为自动驾驶协助服务结束服务的时刻而预先决定的时刻(作为一个例子,一点)这一定时,但不限于此。例如,也可以为将由中心侧装置10的管理者经由通信i/f部18输入以指示通信状况信息发送处理的结束为主旨的指示信息的定时等设为上述结束定时的方式。
[0086]
接下来,参照图9,作为本实施方式所涉及的车辆侧装置20的作用,对执行通信状况信息接收处理的情况的车辆侧装置20的作用进行说明。通过搭载于任意自动驾驶车的车辆侧装置20的cpu21执行通信状况信息接收程序23b,从而执行图9所示的通信状况信息接收处理。图9所示的通信状况信息接收处理例如在搭载了车辆侧装置20的自动驾驶车开始自动行驶的情况下执行。
[0087]
在图9的步骤200中,车辆侧接收部21b等待直到从中心侧装置10接收对应通信状况信息(以下,仅称为“通信状况信息”。),在接下来的步骤202中,车辆侧接收部21b将接收到的通信状况信息存储于存储部23的规定区域。
[0088]
在接下来的步骤204中,车辆侧接收部21b判定预先决定的结束定时是否已到来,在否定判定的情况下返回步骤200,另一方面,在肯定判定的时间点结束本通信状况信息接收处理。此外,在本实施方式中,作为上述结束定时,应用探测到自动驾驶车的点火开关截断的定时,但不限于此。例如,也可以为将从中心侧装置10经由无线通信部28接收到以指示通信状况信息接收处理的结束为主旨的指示信息的定时等设为上述结束定时的方式。
[0089]
接下来,参照图10,作为本实施方式所涉及的车辆侧装置20的作用,对执行车辆侧通信断绝处理的情况的车辆侧装置20的作用进行说明。通过搭载于任意自动驾驶车的车辆侧装置20的cpu21执行车辆侧通信断绝程序23c,从而执行图10所示的车辆侧通信断绝处理。图10所示的车辆侧通信断绝处理例如在搭载了车辆侧装置20的自动驾驶车开始自动行驶的情况下执行。
[0090]
在图10的步骤300中,车辆侧决定部21c判定与中心侧装置10的通信是否断绝,在否定判定的情况下移至后述的步骤326,另一方面,在肯定判定的情况下移至步骤302。
[0091]
在步骤302中,车辆侧决定部21c从存储部23读出通过上述的通信状况信息接收处理存储的通信状况信息。在接下来的步骤304中,车辆侧决定部21c使用读出的通信状况信息,如以下那样导出断绝的与中心侧装置10的通信恢复的预计的位置亦即通信恢复预计地点。
[0092]
即,首先,车辆侧决定部21c从位置检测部29取得表示该时间点的位置的位置信息,设为取得的位置信息所示的位置是与中心侧装置10的通信断绝的地点的位置(以下,称为“通信断绝开始位置”。)。
[0093]
接下来,车辆侧决定部21c将符合下面的条件1以及条件2的各条件的位置中的更接近通信断绝开始位置的位置作为是通信恢复预计地点的位置导出。
[0094]
(条件1)位于从通信断绝开始位置起本车的行驶方向的道路上的下游侧的最靠近的位置,并且在通信状况信息的通信实绩信息中存储有通信时间信息的位置。
[0095]
(条件2)位于从通信断绝开始位置起本车的行驶方向的道路上的下游侧的最靠近的位置,并且在通信状况信息的不稳定区域信息中存储有“普通”这一信息的位置。
[0096]
此外,通信恢复预计地点的导出方法不限于以上的方法。例如,也可以为将符合上述条件1以及条件2的任意一方的条件的位置作为通信恢复预计地点应用的方式等。
[0097]
在接下来的步骤306中,车辆侧决定部21c使用导出的通信恢复预计地点,使用下面的式(1)计算与中心侧装置10的通信恢复的预计的期间亦即车辆侧预计期间tc。此外,式(1)中的ds表示从通信断绝开始位置至通信恢复预计地点的本车的行驶距离,sp表示本车的行驶速度。
[0098]
tc=ds/sp
ꢀꢀꢀꢀꢀꢀ
(1)
[0099]
即,在应用的通信恢复预计地点是通过符合上述条件1的条件得到的地点的情况下,作为一个例子,如图11所示,通过式(1)计算预计为本车到达到通信恢复预计地点(作为一个例子,图11中的星号的地点)的期间,该通信恢复预计地点是使用通过其他自动驾驶车等得到的通信实绩信息而得到的。
[0100]
另外,在应用的通信恢复预计地点是通过符合上述条件2的条件得到的地点的情况下,作为一个例子,如图12所示,通过式(1)计算预计为本车到达到通信恢复预计地点(作为一个例子,图12中的星号的地点)的期间,该通信恢复预计地点是使用不稳定区域信息得到的从隧道等通信变得不稳定的区域脱离后的位置。
[0101]
在接下来的步骤308中,车辆侧决定部21c判定计算出的车辆侧预计期间tc是否为预先决定的阈值th1以下,在否定判定的情况下移至后述的步骤324,另一方面,在肯定判定的情况下移至步骤310。
[0102]
在步骤310中,车辆侧决定部21c对未图示的计时器(在本实施方式中,内置于cpu21的计时器)设定车辆侧预计期间tc。根据向该计时器的车辆侧预计期间tc的设定,在该计时器中,开始直到车辆侧预计期间tc为止的计时。
[0103]
在接下来的步骤312中,车辆侧决定部21c开始向存储部23存储(登记)表示本车的行驶状态的行驶状态信息。此外,在本实施方式中,作为上述行驶状态信息,应用表示本车的行驶速度以及行驶位置的信息,但不限于此,若为车载相机的影像、传感检测结果等能够确定本车的行驶状态的信息,则也能够应用任意信息。
[0104]
在接下来的步骤314中,车辆侧决定部21c判定与中心侧装置10的通信是否恢复,在肯定判定的情况下移至步骤316。在步骤316中,若从中心侧装置10要求行驶状态信息,则车辆侧发送部21a从存储部23读出至此时间点为止已存储的行驶状态信息,并将读出的行驶状态信息经由无线通信部28以及网络80发送至中心侧装置10。在接下来的步骤318中,车辆侧决定部21c停止通过步骤312的处理而开始的行驶状态信息的存储,并在从存储部23删除该行驶状态信息后移至后述的步骤326。这样,在本实施方式中,根据来自中心侧装置10的要求执行行驶状态信息的从自动驾驶车向中心侧装置10的发送,但不限于此。例如,也可以为在与中心侧装置10之间的通信的断绝恢复的时间点,自动地将行驶状态信息发送至中心侧装置10的方式。
[0105]
另一方面,在步骤314中否定判定的情况下移至步骤320,车辆侧决定部21c从位置检测部29取得表示该时间点的位置的位置信息。然后,车辆侧决定部21c判定取得的位置信息所示的位置是否到达通信恢复预计地点,在肯定判定的情况下移至后述的步骤324,另一方面,在否定判定的情况下移至步骤322。
[0106]
在步骤322中,车辆侧决定部21c判定上述计时器的计时是否达到设定的车辆侧预计期间tc,在否定判定的情况下移至步骤314,另一方面,在肯定判定的情况下移至步骤324。
[0107]
在步骤324中,停止部21d进行使本车的自动行驶在最近的路肩停车的控制,之后移至步骤326。
[0108]
在步骤326中,车辆侧决定部21c判定预先决定的结束定时是否已到来,在否定判定的情况下返回步骤300,另一方面,在肯定判定的时间点结束本车辆侧通信断绝处理。此
外,在本实施方式中,作为上述结束定时,应用探测到自动驾驶车的点火开关截断的定时,但不限于此。例如,也可以为将从中心侧装置10经由无线通信部28接收到以指示车辆侧通信断绝处理的结束为主旨的指示信息的定时等设为上述结束定时的方式。
[0109]
接下来,参照图13,作为本实施方式所涉及的中心侧装置10的作用,对执行中心侧通信断绝处理的情况的中心侧装置10的作用进行说明。通过中心侧装置10的cpu11执行中心侧通信断绝程序13c,从而执行图13所示的中心侧通信断绝处理。图13所示的中心侧通信断绝处理例如在成为作为自动驾驶协助服务开始服务的时刻而预先决定的时刻(作为一个例子,四点)的情况下执行。
[0110]
在图13的步骤700中,中心侧决定部11d判定与任意车辆侧装置20的通信是否断绝,在否定判定的情况下移至后述的步骤724,另一方面,在肯定判定的情况下移至步骤702。此外,以下,将通信断绝的自动驾驶车称为“处理对象车”。
[0111]
在步骤702中,中心侧决定部11d从通信状况信息数据库13d读出通信状况信息。在接下来的步骤704中,中心侧决定部11d使用读出的通信状况信息,如以下那样导出与处理对象车的车辆侧装置20的通信恢复的预计的位置亦即通信恢复预计地点。
[0112]
即,首先,中心侧决定部11d设为通过上述的中心侧通信处理从处理对象车最近接收到的探测信息中包含的位置信息所示的位置是与处理对象车的通信断绝的地点的位置亦即通信断绝开始位置。
[0113]
接下来,中心侧决定部11d将符合下面的条件3以及条件4的各条件的位置中的更接近通信断绝开始位置的位置作为是通信恢复预计地点的位置导出。
[0114]
(条件3)位于从通信断绝开始位置起处理对象车的行驶方向的道路上的下游侧的最靠近的位置,并且在通信状况信息的通信实绩信息中存储有通信时间信息的位置。
[0115]
(条件4)位于从通信断绝开始位置起处理对象车的行驶方向的道路上的下游侧的最靠近的位置,并且在通信状况信息的不稳定区域信息中存储有“普通”这一信息的位置。
[0116]
此外,通信恢复预计地点的导出方法不限于以上的方法。例如,也可以为将符合上述条件3以及条件4的任意一方的条件的位置作为通信恢复预计地点应用的方式等。
[0117]
在接下来的步骤706中,中心侧决定部11d使用导出的通信恢复预计地点,使用下面的式(2)计算与处理对象车的通信恢复的预计的期间亦即中心侧预计期间ts。此外,式(2)中的ds表示从通信断绝开始位置至通信恢复预计地点的处理对象车的行驶距离,表示sp处理对象车的行驶速度。这里,行驶速度sp能够从通过中心侧通信处理接收到的探测信息中包含的位置信息所示的行驶位置的每单位时间的变化量得到。
[0118]
ts=ds/sp
ꢀꢀꢀꢀꢀꢀ
(2)
[0119]
即,在应用的通信恢复预计地点是通过符合上述条件3的条件得到的地点的情况下,作为一个例子,如图11所示,通过式(2)计算预计为处理对象车到达到通信恢复预计地点(作为一个例子,图11中的星号的地点)的期间,该通信恢复预计地点是使用通过其他自动驾驶车等得到的通信实绩信息而得到的。
[0120]
另外,在应用的通信恢复预计地点是通过符合上述条件4的条件得到的地点的情况下,作为一个例子,如图12所示,通过式(2)计算预计为处理对象车到达到通信恢复预计地点(作为一个例子,图12中的星号的地点)的期间,该通信恢复预计地点是使用不稳定区域信息得到的从隧道等通信变得不稳定的区域脱离后的位置。
[0121]
在接下来的步骤708中,中心侧决定部11d判定计算出的中心侧预计期间ts是否为预先决定的阈值th2以下,在否定判定的情况下移至后述的步骤722,另一方面,在肯定判定的情况下移至步骤710。
[0122]
在步骤710中,中心侧决定部11d对未图示的计时器(在本实施方式中,内置于cpu11的计时器)设定中心侧预计期间ts。根据向该计时器的中心侧预计期间ts的设定,在该计时器中,开始直到中心侧预计期间ts为止的计时。
[0123]
在接下来的步骤712中,中心侧决定部11d判定与处理对象车的通信是否恢复,在肯定判定的情况下移至步骤714。在步骤714中,要求部11e对处理对象车要求表示通信断绝的期间中的处理对象车的行驶状态的行驶状态信息。根据来自该要求部11e的要求,处理对象车如上述那样将行驶状态信息发送至中心侧装置10。
[0124]
接着,在接下来的步骤716中,设定部11g为了使操作人员确认在从处理对象车接收到的行驶状态信息所示的行驶状态中是否存在异常,而经由通信i/f部18以及网络80对操作人员装置50发送该行驶状态信息、以及指示该行驶状态信息的确认的确认指示信息。若接收到行驶状态信息以及确认指示信息,则操作人员装置50的处理部51a控制显示部55,以便显示接收到的行驶状态信息。操作人员装置50的操作人员确认显示于显示部55的行驶状态信息的内容中是否存在问题,并经由输入部54输入表示确认结果的确认结果信息。处理部51a将输入的确认结果信息经由通信i/f部58以及网络80发送至中心侧装置10。
[0125]
接着,在接下来的步骤718中,设定部11g从操作人员装置50接收确认结果信息,在接收到的确认结果信息是表示没有异常的信息的情况下,为了将在通信断绝的期间中处理对象车行驶过的区间作为有可能通信变得不稳定的区域包含于不稳定区域信息,而执行更新通信状况信息数据库13d的处理亦即更新处理,之后移至后述的步骤724。
[0126]
另一方面,在步骤712中否定判定的情况下移至步骤720,中心侧决定部11d判定上述计时器的计时是否达到设定的中心侧预计期间ts,在否定判定的情况下返回步骤712,另一方面,在肯定判定的情况下移至步骤722。
[0127]
在步骤722中,联络部11f将包含通信断绝的地点以及时刻、认为在通信断绝的期间处理对象车行驶过的路径、以及通信恢复预计地点的各信息的信息作为上述的断绝相关信息导出。然后,联络部11f在将导出的断绝相关信息、以及指示通信断绝的处理对象车的协助的协助指示信息经由通信i/f部18以及网络80对最靠近处理对象车的当地工作人员所持有的移动终端40发送后,移至步骤724。
[0128]
若接收断绝相关信息以及协助指示信息,则作为一个例子,移动终端40的处理部41a使图14所示的当地工作人员提供画面显示于显示部45。在图14所示的当地工作人员提供画面中,显示通信断绝的地点(在图14中记为“通信断绝地点”,以下称为“通信断绝地点”。)、以及通信恢复预计地点(在图14中记为“恢复预计地点”,以下称为“恢复预计地点”。)。另外,在图14所示的当地工作人员提示画面中,显示通信断绝的时刻(在图14中记为“通信断绝产生时刻”。)、以及认为在通信断绝的期间处理对象车行驶过的路径。
[0129]
参照了图14所示的当地工作人员提示画面的当地工作人员通过搜索从通信断绝地点至恢复预计地点的范围,能够容易地发现即使经过中心侧预计期间ts通信也不恢复的处理对象车、即作为协助对象的处理对象车。
[0130]
在步骤724中,中心侧决定部11d判定预先决定的结束定时是否已到来,在否定判
定的情况下返回步骤700,另一方面,在肯定判定的时间点结束本中心侧通信断绝处理。此外,在本实施方式中,作为上述结束定时,应用作为自动驾驶协助服务结束服务的时刻而预先决定的时刻(作为一个例子,一点)这一定时,但不限于此。例如,也可以为将由中心侧装置10的管理者经由通信i/f部18输入以指示中心侧通信断绝处理的结束为主旨的指示信息的定时等设为上述结束定时的方式。
[0131]
如以上说明的那样,根据本实施方式,在自动驾驶协助中心与自动驾驶车的通信断绝的情况下,基于表示管理系统90的管理对象区域内的自动驾驶车能够行驶的各位置上的自动驾驶协助中心与自动驾驶车之间的通信的状况的信息亦即通信状况信息,决定是否继续自动行驶、以及是否联络进行对自动驾驶车的协助的协助者。因此,能够抑制自动驾驶协助服务的连续性的降低,并且抑制花费于自动驾驶协助服务的成本的上升。
[0132]
另外,根据本实施方式,由车辆侧决定部21c基于自身所设置于的自动驾驶车的行驶路线以及通信状况信息导出预计为断绝的通信恢复的期间亦即车辆侧预计期间tc,并在导出的车辆侧预计期间tc为预先决定的期间以内的情况下,决定为继续自动驾驶。因此,通过适当地设定上述预先决定的期间,能够更适当地抑制自动驾驶协助服务的连续性的降低。
[0133]
另外,根据本实施方式,由中心侧决定部11d基于通信断绝的自动驾驶车的行驶路线以及通信状况信息导出预计为断绝的通信恢复的期间亦即中心侧预计期间ts,并在导出的中心侧预计期间ts为预先决定的期间以内的情况下,决定为不联络协助者。因此,通过适当地设定上述预先决定的期间,能够更适当地抑制花费于自动驾驶协助服务的成本的上升。
[0134]
另外,根据本实施方式,在即使经过中心侧预计期间ts与自动驾驶车的通信也不恢复的情况下,由中心侧决定部11d决定为联络协助者。因此,能够在维持自动驾驶协助服务的安全性、安心感的同时,抑制花费于自动驾驶协助服务的成本的上升。
[0135]
[第二实施方式]
[0136]
在本第二实施方式中,对在至断绝的通信恢复的预计的地点(通信恢复预计地点)为止的路程中需要来自协助者的协助的程度为预先决定的等级以下的情况下继续自动行驶的情况的方式例进行说明。此外,本实施方式所涉及的管理系统90的结构与上述第一实施方式所涉及的结构(参照图1、图2。)相同,因此省略此处的说明。
[0137]
本第二实施方式所涉及的车辆侧决定部21c就以下内容与上述第一实施方式不同,即,基于自身所设置于的自动驾驶车的行驶路线以及通信状况信息,在至断绝的通信恢复的预计的地点为止的路程中需要协助的程度为预先决定的等级以下的情况下,决定为继续自动驾驶。
[0138]
更具体而言,本第二实施方式所涉及的车辆侧决定部21c在上述路程是没有人行横道的路程、是作为人车分流道路的路程、以及在自动驾驶车为公共汽车、出租车等伴随上下车的车辆的情况下是没有乘客的上下车地点的路程的全部的条件成立的路程的情况下,判断为上述需要协助的程度为上述等级以下。因此,在本第二实施方式所涉及的车辆侧装置20的存储部23中,预先登记有表示管理系统90的管理对象区域内的没有人行横道的路程的信息、表示作为人车分流道路的路程的信息、以及表示没有上下车地点的路程的信息的各信息(以下,称为“路程相关信息”。)。
[0139]
接下来,参照图15,作为本第二实施方式所涉及的车辆侧装置20的作用,对执行车辆侧通信断绝处理的情况的车辆侧装置20的作用进行说明。此外,对图15所示的车辆侧通信断绝处理中的执行与图10所示的车辆侧通信断绝处理相同的处理的步骤标记与图10相同的步骤编号,省略其说明。
[0140]
在图15所示的车辆侧通信断绝处理与图10所示的车辆侧通信断绝处理之间,以下内容不同,即,步骤306以及步骤308的处理分别替换为步骤307以及步骤309的处理,并且删除步骤310以及步骤322的处理。
[0141]
即,在图15的步骤307中,车辆侧决定部21c从存储部23读出路程相关信息,使用该路程相关信息以及通过步骤304的处理导出的通信恢复预计地点,使用下面的式(3)计算表示在至该通信恢复预计地点为止的路程中需要来自协助者的协助的程度的自动驾驶风险值r。此外,式(3)中的cp表示在从上述的通信断绝开始位置至通信恢复预计地点之间(以下,称为“风险对象区间”。)存在人行横道的情况下带入“1”,在不存在人行横道的情况下代入“0”的变量。另外,式(3)中的dp表示在风险对象区间不是人车分流道路的情况下代入“1”,在是人车分流道路的情况下代入“0”的变量。进一步地,式(3)中的ep表示在自动驾驶车为公共汽车、出租车等伴随上下车的车辆的情况下,在风险对象区间存在乘客的上下车地点的情况下代入“1”,在没有上下车地点的情况下代入“0”的变量。此外,在自动驾驶车不是公共汽车、出租车等伴随上下车的车辆的情况下,向变量ep代入“0”。
[0142]
r=cp dp ep
ꢀꢀꢀꢀꢀꢀ
(3)
[0143]
即,作为一个例子,如图16所示,仅在风险对象区间中不存在人行横道,而风险对象区间是人车分流道路,且自动驾驶车为公共汽车,出租车等伴随上下车的车辆的情况的没有乘客的上下车地点的情况下,通过式(3)计算出“0”作为自动驾驶风险值r。
[0144]
接着,在接下来的步骤309中,车辆侧决定部21c判定计算出的自动驾驶风险值r是否为预先决定的阈值th3(在本实施方式中,0)以下,在否定判定的情况下移至步骤324,另一方面,在肯定判定的情况下移至步骤312。
[0145]
如以上说明的那样,根据本实施方式,由车辆侧决定部21c基于自身所在的自动驾驶车的行驶路线以及通信状况信息,在至断绝的通信恢复的预计的地点为止的路程中需要来自协助者的协助的程度(自动驾驶风险值r)为预先决定的等级(阈值th3)以下的情况下,决定为继续自动驾驶。因此,与不使用自动驾驶风险值r的情况相比较,能够更适当地抑制自动驾驶协助服务的连续性的降低。
[0146]
此外,在上述第一实施方式中,对在车辆侧预计期间tc为预先决定的期间以内的情况(以下,称为“第一条件”。)下继续自动行驶的情况进行了说明,在本第二实施方式中,对在至断绝的通信恢复的预计的地点为止的路程中需要来自协助者的协助的程度为预先决定的等级以下的情况(以下,称为“第二条件”。)下继续自动行驶的情况进行了说明,但不限于此。例如,也可以为将这两个条件组合,在第一条件与第二条件双方成立的情况下继续自动行驶的方式。由此,与上述第一实施方式以及第二实施方式相比较,能够使自动行驶的安全性提高。
[0147]
[第三实施方式]
[0148]
在本第三实施方式中,主要对通过有效地使用通信状况信息,从而能够迅速地进行向当地工作人员的联络的情况等的方式例进行说明。此外,本实施方式所涉及的管理系
统90的结构与上述第一实施方式所涉及的结构(参照图1、图2。)相同,因此省略此处的说明。
[0149]
本第三实施方式所涉及的中心侧决定部11d主要就使用最新的通信状况信息来决定是否联络协助者这点与上述第一实施方式不同。
[0150]
接下来,参照图17,作为本第三实施方式所涉及的中心侧装置10的作用,对执行中心侧通信断绝处理的情况的中心侧装置10的作用进行说明。此外,对图17所示的中心侧通信断绝处理中的执行与图13所示的中心侧通信断绝处理相同的处理的步骤标记与图13相同的步骤编号,省略其说明。
[0151]
在图17所示的中心侧通信断绝处理与图13所示的中心侧通信断绝处理间,就以下内容不同,即,删除步骤710的处理而追加步骤715的处理,并且步骤720的处理替换为步骤719以及步骤721的处理。
[0152]
即,在图17的步骤715中,设定部11g判定是否预测为在从自动驾驶车接收到的行驶状态信息所示的行驶状态中存在异常,在肯定判定的情况下移至步骤716,另一方面,在否定判定的情况下,不执行步骤716以及步骤718的处理,而移至步骤724。在本实施方式中,通过判定根据接收到的行驶状态信息计算出的加速度的绝对值是否为规定的阈值以上、该行驶状态信息所示的行驶位置是否不稳定等从而进行是否预测为在上述行驶状态中存在异常的判定,但不言自明地,并不限于此。
[0153]
另一方面,在步骤719中,中心侧决定部11d判定与自动驾驶车的通信断绝的时刻加上通过步骤706的处理计算出的中心侧预计期间ts后的时刻(以下,称为“通信恢复预计时刻”。)是否在当前的时刻之前,在肯定判定的情况下移至步骤722,另一方面,在否定判定的情况下移至步骤721。
[0154]
在步骤721中,中心侧决定部11d判定通信状况信息是否相对于在步骤702中读出的信息而言已更新,在肯定判定的情况下返回步骤702,另一方面,在否定判定的情况下返回步骤712。
[0155]
作为一个例子,如图18的左图所示,例如,考虑通信断绝的时刻正好是12时34分,最初的中心侧预计期间ts为2分钟的情况。在该情况下,由于在上述当前的时刻达到通信恢复预计时刻为止步骤719的处理为否定判定,不执行进行向当地工作人员的联络的处理(步骤722的处理)而移至步骤721,反复执行步骤712、719、721的处理直到通信状况信息更新为止。而且,在执行该反复处理期间通信状况信息已更新的情况下,从步骤721的处理返回步骤702的处理,使用更新后的通信状况信息再次计算中心侧预计期间ts。
[0156]
因此,作为一个例子,如图18的右图所示,在再次计算出的中心侧预计期间ts为30秒,并且上述当前的时刻为从通信断绝起1分钟后的情况下,步骤719的处理为肯定判定而立即对当地工作人员进行联络。此外,如图18所示,也可以为在认为行驶在存在通信实绩的区域但通信不恢复的情况下,预测为通信机故障的方式。
[0157]
如以上说明的那样,根据本实施方式,通过中心侧决定部11d,每当通信状况信息更新就重新计算中心侧预计期间ts。因此,能够更迅速地进行向当地工作人员的联络。
[0158]
另外,根据本实施方式,通过设定部11g,仅在预测为在处理对象车的行驶状态中存在异常的情况下,使协助者确认行驶状态信息所示的行驶状态中是否存在异常。因此,能够进一步抑制花费于协助者的成本。
[0159]
[第四实施方式]
[0160]
在本第四实施方式中,主要对在通信断绝的状况下继续自动行驶的情况下使自动驾驶车的行驶速度比通常低的情况等的方式例进行说明。首先,参照图19,对本第四实施方式所涉及的管理系统90的硬件结构进行说明。此外,对图19中的与图1相同的构成要素标记与图1相同的附图标记,省略其说明。
[0161]
如图19所示,在本第四实施方式所涉及的管理系统90与上述第一实施方式所涉及的管理系统90间,仅就车辆侧装置20具备外界传感器60这点不同。外界传感器60为拍摄自动驾驶车的前方方向的相机以及测定到障碍物为止的距离的lidar,cpu21能够取得通过该拍摄而得到的图像信息以及测距数据。
[0162]
接下来,参照图20,对本第四实施方式所涉及的管理系统90中包含的各装置的功能性结构进行说明。此外,对图20中的进行与图2相同的处理的框标记与图2相同的附图标记,省略其说明。
[0163]
如图20所示,本第四实施方式所涉及的管理系统90相对于第一实施方式所涉及的管理系统90就以下内容不同,即,在车辆侧装置20新设置有在与自动驾驶协助中心的通信断绝的期间继续自动行驶的情况下以与该期间以前相比较使行驶速度降低的方式进行控制的速度控制部21e。另外,本第四实施方式所涉及的管理系统90相对于第一实施方式所涉及的管理系统90就以下内容不同,即,中心侧发送部11c在发送通信实绩信息时,仅发送基于成为该通信实绩信息的发送目的地的自动驾驶车的行驶位置和行驶路线而在该行驶路线的地点中预测为能够通信的最近的地点信息(以下,称为“能够通信预测地点”。)。进一步地,本第四实施方式所涉及的管理系统90相对于第一实施方式所涉及的管理系统90就以下内容不同,即,车辆侧决定部21c在车辆侧预计期间tc为预先决定的期间以内,并且根据来自预先决定的传感器(在本实施方式中,构成外界传感器60的相机以及lidar)的传感检测的结果而判断为能够安全地行驶的情况下,决定为继续自动驾驶。
[0164]
接下来,参照图21,作为本第四实施方式所涉及的中心侧装置10的作用,对执行通信状况信息发送处理的情况的中心侧装置10的作用进行说明。此外,对图21所示的通信状况信息发送处理中的执行与图8所示的通信状况信息发送处理相同的处理的步骤标记与图8相同的步骤编号,省略其说明。
[0165]
在图21所示的通信状况信息发送处理与图8所示的通信状况信息发送处理间,就代替步骤604的处理而应用了步骤603以及步骤605的处理这点不同。
[0166]
即,在图21的步骤603中,中心侧发送部11c使用通过步骤602的处理读出的通信状况信息,通过与在图13所示的中心侧通信断绝处理的步骤704的处理中导出的通信恢复预计地点相同的方法,导出能够通信预测地点。在接下来的步骤605中,中心侧发送部11c将表示导出的能够通信预测地点的信息经由通信i/f部18以及网络80发送至发送目的地的自动驾驶车。
[0167]
接下来,参照图22,作为本第四实施方式所涉及的车辆侧装置20的作用,对执行通信状况信息接收处理的情况的车辆侧装置20的作用进行说明。此外,对图22所示的通信状况信息接收处理中的执行与图9所示的通信状况信息接收处理相同的处理的步骤标记与图9相同的步骤编号,省略其说明。
[0168]
在图22所示的通信状况信息接收处理与图9所示的通信状况信息接收处理间,就
代替步骤200以及步骤202的处理而分别应用了步骤201以及步骤203的处理这点不同。
[0169]
即,在图22的步骤201中,车辆侧接收部21b等待直到从中心侧装置10接收到表示能够通信预测地点的信息,在接下来的步骤203中,车辆侧接收部21b将接收到的表示能够通信预测地点的信息存储于存储部23的规定区域。
[0170]
接下来,参照图23,作为本第四实施方式所涉及的车辆侧装置20的作用,对执行车辆侧通信断绝处理的情况的车辆侧装置20的作用进行说明。此外,对图23所示的车辆侧通信断绝处理中的执行与图10所示的车辆侧通信断绝处理相同的处理的步骤标记与图10相同的步骤编号,省略其说明。
[0171]
在图23所示的车辆侧通信断绝处理与图10所示的车辆侧通信断绝处理间,就代替步骤302、步骤304、步骤306的处理而分别应用了步骤303、步骤305、步骤307的处理这点不同。另外,在图23所示的车辆侧通信断绝处理与图10所示的车辆侧通信断绝处理间,就新包含有步骤309以及步骤315的处理这点不同。
[0172]
即,在图23的步骤303中,车辆侧决定部21c从存储部23读出通过上述的通信状况信息接收处理存储的表示能够通信预测地点的信息。在接下来的步骤305中,速度控制部21e以使本车的行驶速度与此前相比降低规定速度(作为一个例子,10km/h)的方式进行控制。在接下来的步骤307中,车辆侧决定部21c将通过读出的信息表示的能够通信预测地点作为上述的通信恢复预计地点,并且将通过步骤305的处理而降低后的行驶速度作为行驶速度sp,与上述第一实施方式相同地,使用式(1)计算车辆侧预计期间tc。此外,在该情况下,中心侧装置10也相同地,设为处理对象车的行驶速度与通信断绝以前相比降低规定速度,计算中心侧预计期间ts。
[0173]
另外,在步骤309中,车辆侧决定部21c通过基于来自外界传感器60的传感检测结果判断在本车的前方是否存在妨碍本车的行驶的障碍物等,从而判定在基于外界传感器60的传感检测结果中是否存在问题、即判定是否能够通过自动驾驶安全地通过至通信恢复预计地点为止的路程,在肯定判定的情况下移至步骤310,另一方面,在否定判定的情况下移至步骤324。
[0174]
并且,在步骤315中,速度控制部21e进行使通过步骤305的处理降低后的本车的行驶速度复原为原本的速度的控制。
[0175]
如以上说明的那样,根据本实施方式,在通过中心侧发送部11c发送通信实绩信息时,仅发送基于成为该通信实绩信息的发送目的地的自动驾驶车的行驶位置和行驶路线而在该行驶路线的地点中预测为能够通信的最近的地点信息。因此,与发送通信实绩信息本身的情况相比较,能够更高效地发送关于通信实绩的信息。
[0176]
另外,根据本实施方式,在车辆侧预计期间tc为预先决定的期间以内,并且根据预先决定的传感器的传感检测的结果而判断为能够安全地行驶的情况下,通过车辆侧决定部21c决定为继续自动驾驶。因此,能够更适当地进行自动行驶的继续。
[0177]
另外,根据本实施方式,在自动驾驶车中与自动驾驶协助中心的通信断绝的期间继续自动行驶的情况下,通过速度控制部21e以与该期间以前相比较使行驶速度降低的方式进行控制。因此,能够使自动行驶的安全性提高。
[0178]
此外,在上述各实施方式中,对将管理部11b、中心侧决定部11d、要求部11e、联络部11f以及设定部11g设置于中心侧装置10,并将车辆侧决定部21c、停止部21d以及速度控
制部21e设置于车辆侧装置20的情况进行了说明,但不限定于此。例如,这些各部也可以在能够执行对应的功能的范围内,设置于中心侧装置10以及车辆侧装置20的任意一个。
[0179]
另外,虽然在上述各实施方式中未提及,但也可以设为以下方式,即,对于通过中心侧通信断绝处理(参照图13。)的步骤718的处理而由设定部11g设定为不稳定区域信息的通信断绝区间,在与在该通信断绝区间行驶的其他自动驾驶车的通信未断绝的情况下,通过该设定部11g进行将该通信断绝区间从不稳定区域信息除去的设定。由此,能够减少不必要的判定的产生。
[0180]
另外,上述各实施方式所涉及的式(1)~式(3)的各数式是一个例子,各数式都能够施加各种变形。例如,在式(3)中,设为将变量cp、变量dp、以及变量ep各变量的值相加,但也能够设为通过将这些各变量的值相乘来计算自动驾驶风险值r的方式。另外,上述各实施方式所涉及的各装置的结构是一个例子,各装置都能够在不脱离本公开的主旨的范围内变更结构。例如,在上述各实施方式中,作为中心侧装置10以及车辆侧装置20例示了具有输入部以及显示部的装置,但各装置也都能够设为不具有这些部位的结构。
[0181]
另外,在上述各实施方式中,例如,作为执行中心侧接收部11a、管理部11b、中心侧发送部11c、中心侧决定部11d、要求部11e、联络部11f、设定部11g、车辆侧发送部21a、车辆侧接收部21b、车辆侧决定部21c、停止部21d、速度控制部21e的各处理的处理部(processing unit)的硬件构造,能够使用下面所示的各种处理器(processor)。在上述各种处理器中,除了如上述那样执行软件(程序)而作为处理部发挥功能的作为通用的处理器的cpu以外,还包含fpga(field-programmable gate array:现场可编程门阵列)等在制造后能够变更电路结构的处理器亦即可编程逻辑器件(programmable logic device:pld)、asic(application specific integrated circuit:专用集成电路)等具有为了执行特定的处理而专用设计的电路结构的处理器亦即专用电路等。
[0182]
处理部也可以由这些各种处理器中的一个构成,也可以由同种或者不同种类的两个以上的处理器的组合(例如,多个fpga的组合、cpu与fpga的组合)构成。另外,也可以由一个处理器构成处理部。
[0183]
作为由一个处理器构成处理部的例子,第一,存在如客户端以及服务器等计算机所代表的那样,由一个以上的cpu与软件的组合构成一个处理器,该处理器作为处理部发挥功能的方式。第二,存在片上系统(system on chip:soc)等所代表的那样,使用通过一个ic(integrated circuit:成电路)芯片实现包含处理部的系统整体的功能的处理器的方式。这样,作为硬件构造,使用上述各种处理器的一个以上构成处理部。
[0184]
并且,作为这些各种处理器的硬件构造,更具体而言,能够使用组合了半导体元件等电路元件的电路(circuitry)。
[0185]
基于实施方式对本公开进行了记述,但应当理解为本公开不限定于该实施方式、结构。本公开也包含各种变形例、等同范围内的变形。除此之外,各种组合、方式。进一步包含有仅一个要素、一个以上、或一个以下的其他组合、方式也属于本公开的范畴、思想范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
