技术特征:
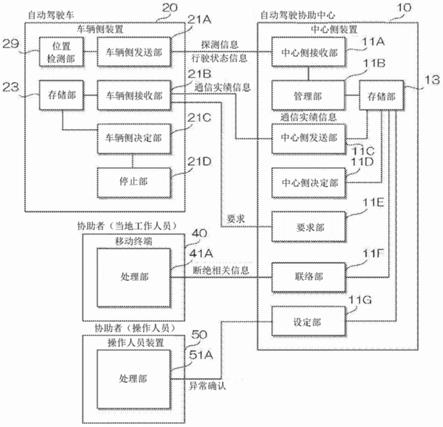
1.一种管理系统,是通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理上述自动驾驶车的车辆状态的管理系统(90),其中,包含:车辆侧装置(20),设置于上述自动驾驶车,并具备车辆侧决定部(21c),该车辆侧决定部在与上述自动驾驶协助中心的通信断绝的情况下,基于表示上述管理系统的管理对象区域内的上述自动驾驶车能够行驶的各位置上的上述自动驾驶协助中心与上述自动驾驶车之间的通信的状况的信息亦即通信状况信息来决定是否继续自动驾驶;以及中心侧装置(10),设置于上述自动驾驶协助中心,并具备中心侧决定部(11d),该中心侧决定部在与上述自动驾驶车的通信断绝的情况下,基于上述通信状况信息决定是否联络进行对上述自动驾驶车的协助的协助者。2.根据权利要求1所述的管理系统,其中,上述车辆侧装置还具备:车辆侧发送部(21a),将包含表示自身所在的上述自动驾驶车的行驶位置的位置信息的探测信息发送至上述中心侧装置,上述中心侧装置还具备:中心侧接收部(11a),接收由上述车辆侧发送部发送出的探测信息;管理部(11b),将由上述中心侧接收部接收到的探测信息中包含的位置信息作为通信成功的通信实绩信息进行管理;以及中心侧发送部(11c),将由上述管理部管理的上述通信实绩信息发送至上述车辆侧装置,上述通信状况信息包含上述通信实绩信息。3.根据权利要求2所述的管理系统,其中,上述中心侧发送部在发送上述通信实绩信息时,仅发送基于成为该通信实绩信息的发送目的地的上述自动驾驶车的行驶位置和行驶路线而在该行驶路线的地点中预测为能够通信的最近的地点信息。4.根据权利要求1~3中任一项所述的管理系统,其中,上述通信状况信息包含表示能够根据上述管理对象区域内的地理信息判断出的上述自动驾驶协助中心与上述自动驾驶车之间的通信变得不稳定的区域的信息亦即不稳定区域信息。5.根据权利要求1~4中任一项所述的管理系统,其中,上述车辆侧决定部基于自身所在的上述自动驾驶车的行驶路线以及上述通信状况信息导出预计为断绝的通信恢复的期间亦即车辆侧预计期间,在导出的车辆侧预计期间为预先决定的期间以内的情况下,决定为继续自动驾驶。6.根据权利要求5所述的管理系统,其中,上述车辆侧决定部在上述车辆侧预计期间为上述预先决定的期间以内,并且根据来自预先决定的传感器的传感检测的结果而判断为能够安全地行驶的情况下,决定为继续自动驾驶。7.根据权利要求1~4中任一项所述的管理系统,其中,上述车辆侧决定部在基于自身所在的上述自动驾驶车的行驶路线以及上述通信状况信息而在至断绝的通信恢复的预计的地点为止的路程中需要来自上述自动驾驶协助中心
的协助的程度为预先决定的等级以下的情况下,决定为继续自动驾驶。8.根据权利要求7所述的管理系统,其中,上述车辆侧决定部在上述路程是没有人行横道的路程、作为人车分流道路的路程、以及没有上下车地点的路程中的至少一个路程的情况下,判断为需要上述协助的程度为上述等级以下。9.根据权利要求5或7所述的管理系统,其中,上述车辆侧决定部基于自身所在的上述自动驾驶车的行驶路线以及上述通信状况信息导出预计为断绝的通信恢复的期间亦即车辆侧预计期间,在导出的车辆侧预计期间为预先决定的期间以内,并且基于上述行驶路线以及上述通信状况信息而在至断绝的通信恢复的预计的地点为止的路程中需要协助的程度为预先决定的等级以下的情况下,决定为继续自动驾驶。10.根据权利要求1~9中任一项所述的管理系统,其中,上述车辆侧装置还具备:停止部(21d),该停止部在上述通信断绝的状态下继续自动行驶的情况,且即使到达该通信的恢复预计地点该通信也不恢复的情况下,使上述自动行驶停止。11.根据权利要求1~10中任一项所述的管理系统,其中,上述中心侧决定部基于通信断绝的上述自动驾驶车的行驶路线以及上述通信状况信息导出预计为断绝的通信恢复的期间亦即中心侧预计期间,在导出的中心侧预计期间为预先决定的期间以内的情况下,决定为不联络上述协助者。12.根据权利要求11所述的管理系统,其中,上述中心侧决定部在即使经过上述中心侧预计期间与上述自动驾驶车的通信也不恢复的情况下,决定为联络上述协助者。13.根据权利要求12所述的管理系统,其中,上述中心侧装置还具备:联络部(11f),在上述中心侧决定部决定为不联络上述协助者后决定为联络上述协助者的情况下,向上述协助者联络表示与上述自动驾驶车的通信断绝的地点、以及认为在断绝期间上述自动驾驶车所行驶过的路径的至少一方的断绝相关信息。14.根据权利要求1~13中任一项所述的管理系统,其中,上述车辆侧装置还具备:速度控制部(21e),在上述自动驾驶车在与上述自动驾驶协助中心的通信断绝的期间继续自动行驶的情况下,以与该期间以前相比较使行驶速度降低的方式进行控制。15.根据权利要求1~14中任一项所述的管理系统,其中,上述中心侧装置还具备:要求部(11e),在与上述通信断绝的上述自动驾驶车的通信恢复的情况下,向该自动驾驶车要求表示该通信断绝的期间中的该自动驾驶车的行驶状态的行驶状态信息。16.根据权利要求15所述的管理系统,其中,上述中心侧装置还具备:设定部(11g),使上述协助者确认在根据来自上述要求部的要求而从上述自动驾驶车得到的上述行驶状态信息所示的行驶状态中是否存在异常,在没有异常的情况下,进行将
在上述通信断绝的期间中上述自动驾驶车行驶过的区间亦即通信断绝区间包含于表示上述自动驾驶协助中心与上述自动驾驶车之间的通信变得不稳定的区域的信息亦即不稳定区域信息的设定。17.根据权利要求16所述的管理系统,其中,上述设定部在与在上述通信断绝区间行驶的其他上述自动驾驶车的通信未断绝的情况下,进行从上述不稳定区域信息除去该通信断绝区间的设定。18.根据权利要求16或17所述的管理系统,其中,上述设定部仅在预测为在上述行驶状态中存在异常的情况下,使上述协助者确认在上述行驶状态信息所示的行驶状态中是否存在异常。19.一种管理方法,是在通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理上述自动驾驶车的车辆状态的管理系统中使用的管理方法,其中,在上述自动驾驶协助中心与上述自动驾驶车的通信断绝的情况下,基于表示上述管理系统的管理对象区域内的上述自动驾驶车能够行驶的各位置上的上述自动驾驶协助中心与上述自动驾驶车之间的通信的状况的信息亦即通信状况信息,来决定是否继续自动行驶、以及是否联络进行对上述自动驾驶车的协助的协助者。20.根据权利要求19所述的管理方法,其中,基于上述自动驾驶车的行驶路线以及上述通信状况信息导出预计为断绝的通信恢复的期间亦即车辆侧预计期间,在导出的车辆侧预计期间为预先决定的期间以内的情况下,决定为继续自动驾驶。21.根据权利要求20所述的管理方法,其中,在上述车辆侧预计期间为上述预先决定的期间以内,并且根据来自预先决定的传感器的传感检测的结果而判断为能够安全地行驶的情况下,决定为继续自动驾驶。22.根据权利要求19所述的管理方法,其中,基于上述自动驾驶车的行驶路线以及上述通信状况信息导出预计为断绝的通信恢复的期间亦即中心侧预计期间,在导出的中心侧预计期间为预先决定的期间以内的情况下,决定为不联络上述协助者。23.根据权利要求22所述的管理方法,其中,在即使经过上述中心侧预计期间与上述自动驾驶车的通信也不恢复的情况下,决定为联络上述协助者。24.一种管理程序,是在通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理上述自动驾驶车的车辆状态的管理系统中使用的管理程序,其中,用于使计算机执行以下处理:在上述自动驾驶协助中心与上述自动驾驶车的通信断绝的情况下,基于表示上述管理系统的管理对象区域内的上述自动驾驶车能够行驶的各位置上的上述自动驾驶协助中心与上述自动驾驶车之间的通信的状况的信息亦即通信状况信息,来决定是否继续自动行驶、以及是否联络进行对上述自动驾驶车的协助的协助者。
技术总结
本发明的管理系统是通过自动驾驶协助中心与自动行驶的自动驾驶车定期地通信从而管理自动驾驶车的车辆状态的管理系统,包含:车辆侧装置(20),设置于自动驾驶车,并具备车辆侧决定部(21C),上述车辆侧决定部在与自动驾驶协助中心的通信断绝的情况下,基于表示管理系统的管理对象区域内的自动驾驶车能够行驶的各位置上的自动驾驶协助中心与自动驾驶车之间的通信的状况的信息亦即通信状况信息来决定是否继续自动驾驶;以及中心侧装置(10),设置于自动驾驶协助中心,并具备中心侧决定部(11D),该中心侧决定部在与自动驾驶车的通信断绝的情况下,基于通信状况信息来决定是否联络进行对自动驾驶车的协助的协助者。络进行对自动驾驶车的协助的协助者。络进行对自动驾驶车的协助的协助者。
技术研发人员:吉永谕史 平山泰弘
受保护的技术使用者:株式会社电装
技术研发日:2020.10.12
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。