1.本发明涉及部件供给装置。
背景技术:
2.以往,已知从供给部取出部件并向搭载头移交部件的部件供给装置(例如,参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2005-93667号公报
技术实现要素:
6.发明要解决的课题
7.然而,在使部件供给装置更小型化这一观点上仍有改善的余地。
8.因此,本发明的目的在于解决上述课题,并提供能够更小型化的部件供给装置。
9.用于解决课题的方案
10.为了达成上述目的,本发明的一方案的部件供给装置是向将部件搭载于基板的搭载头供给具有第一面以及与第一面相反的一侧的第二面的部件的部件供给装置,其中,该部件供给装置具备:拾取部,其具有保持部件的部件保持头,在第一部件的第一面朝上的状态下,利用朝下的部件保持头拾取第一部件,使拾取到第一部件的部件保持头翻转为朝上而在第一部件的第二面朝上的状态下将该第一部件向搭载头移交;以及中继部,其在拾取到第二部件的部件保持头从朝下翻转为朝上的中途,在部件保持头朝斜上方的状态下从部件保持头接收第二部件并将该第二部件向搭载头移交。
11.发明效果
12.根据本发明的部件供给装置,能够使部件供给装置更小型化。
附图说明
13.图1是示出本发明的实施方式的部件搭载装置的概要结构的俯视图。
14.图2是示出本发明的实施方式的第一部件供给装置的概要结构的俯视图。
15.图3是示出本发明的实施方式的第一部件供给装置的概要结构的沿x方向切断得到的剖视图。
16.图4是示出本发明的实施方式的承载件保持部的概要结构的俯视图。
17.图5是示出本发明的实施方式的未保持承载件的状态下的承载件保持部的概要结构的俯视图。
18.图6是示出本发明的实施方式的保持部主体的概要结构的俯视图。
19.图7是示出本发明的实施方式的被承载件保持部保持的承载件的概要结构的俯视图。
20.图8是示出本发明的实施方式的由承载件保持部保持承载件前的状态的图5的a-a线剖视图。
21.图9是示出本发明的实施方式的由承载件保持部保持着承载件的状态的图5的a-a线剖视图。
22.图10是示出本发明的实施方式的移动基座的概要结构的俯视图。
23.图11是示出本发明的实施方式的由承载件保持部保持着承载件的状态的图5的b-b线剖视图。
24.图12是示出本发明的实施方式的由承载件保持部保持着承载件的状态的图5的c-c线剖视图。
25.图13是示出本发明的实施方式的拾取单元的概要结构的剖视图。
26.图14是示出本发明的实施方式的拾取部以及中继部的概要结构的侧视图。
27.图15是示出本发明的实施方式的拾取部以及中继部的概要结构的侧视图。
28.图16是示出本发明的实施方式的拾取部以及中继部的概要结构的侧视图。
29.图17是本发明的实施方式的拾取单元的俯视图。
30.图18是图17的拆下了盖的状态下的拾取单元的俯视图。
31.图19是示出本发明的实施方式的保持头驱动机构的概要结构的图。
32.图20是示出本发明的实施方式的朝下的部件保持头与第一移动片连接的状态下的拾取部的概要结构的侧视图。
33.图21是示出本发明的实施方式的保持头更换器的概要结构的侧视图。
34.图22是示出本发明的实施方式的保持头更换器的概要结构的俯视图。
35.图23是示出本发明的实施方式的保持头更换器的概要结构的俯视图。
36.图24a是示出本发明的实施方式的将部件保持头安装于头保持部前的状态的概要图。
37.图24b是示出本发明的实施方式的将部件保持头安装在了头保持部的状态的概要图。
38.图25a是示出本发明的实施方式的从头保持部拆下部件保持头的动作的保持头更换器的剖视图。
39.图25b是示出本发明的实施方式的从头保持部拆下部件保持头的动作的保持头更换器的剖视图。
40.图25c是示出本发明的实施方式的从头保持部拆下部件保持头的动作的保持头更换器的剖视图。
41.图25d是示出本发明的实施方式的从头保持部拆下部件保持头的动作的保持头更换器的剖视图。
42.图26a是示出本发明的实施方式的将部件保持头安装于头保持部的动作的保持头更换器的剖视图。
43.图26b是示出本发明的实施方式的将部件保持头安装于头保持部的动作的保持头更换器的剖视图。
44.图26c是示出本发明的实施方式的将部件保持头安装于头保持部的动作的保持头更换器的剖视图。
45.图26d是示出本发明的实施方式的将部件保持头安装于头保持部的动作的保持头更换器的剖视图。
46.图27是示出本发明的实施方式的推顶器的概要结构的俯视图。
47.图28是示出本发明的实施方式的推顶器的概要结构的俯视图。
48.图29是本发明的实施方式的部件搭载装置的控制部的概要框图。
49.图30是示出本发明的实施方式的在承载件保持部保持有承载件的情况下的推顶器的位置的校正动作的剖视图。
50.图31是示出本发明的实施方式的在承载件保持部未保持承载件的情况下的推顶器的位置的校正动作的剖视图。
51.图32是示出本发明的实施方式的部件保持头、中继用部件保持头以及部件拍摄部的相对的位置关系的概要结构图。
52.图33是示出本发明的实施方式的部件保持头、中继用部件保持头以及部件拍摄部的相对的位置关系的概要结构图。
53.图34是本发明的实施方式的由基板识别相机对部件保持头以及保持于部件保持头的部件进行拍摄而得到的图像。
54.图35a是示出本发明的实施方式的倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
55.图35b是示出本发明的实施方式的倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
56.图35c是示出本发明的实施方式的倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
57.图35d是示出本发明的实施方式的倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
58.图35e是示出本发明的实施方式的倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
59.图35f是示出本发明的实施方式的倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
60.图36a是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
61.图36b是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
62.图36c是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
63.图36d是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
64.图36e是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
65.图36f是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
66.图36g是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
67.图36h是示出本发明的实施方式的裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
具体实施方式
68.本发明的第一方案的部件供给装置是向将部件搭载于基板的搭载头供给具有第一面以及与第一面相反的一侧的第二面的部件的部件供给装置,其中,该部件供给装置具备:拾取部,其具有保持部件的部件保持头,在第一部件的第一面朝上的状态下,利用朝下的部件保持头拾取第一部件,使拾取到第一部件的部件保持头翻转为朝上而在第一部件的第二面朝上的状态下将该第一部件向搭载头移交;以及中继部,其在拾取到第二部件的部件保持头从朝下翻转为朝上的中途,在部件保持头朝斜上方的状态下从部件保持头接收第二部件并将该第二部件向搭载头移交。
69.与部件保持头朝水平方向横向或朝斜下方的状态相比,通过中继部在部件保持头朝斜上方的状态下接收第二部件,能够缩短中继部从接收第二部件到将该第二部件向搭载头移交为止的中继部的路径长度。由此,能够使部件供给装置小型化。
70.在本发明的第二方案的部件供给装置中,也可以是,该部件供给装置具有:第一转动轴,其使部件保持头在上下方向上转动,以使以朝下的状态拾取到第一部件的部件保持头翻转为朝上并将第一部件向搭载头移交;以及第二转动轴,其使中继部在上下方向上转动,以使从部件保持头以朝斜下方的状态接收到第二部件的中继部翻转为朝上并将第二部件向搭载头移交。
71.通过使部件保持头以及中继部以转动轴为中心在上下方向上转动,能够更容易地进行部件的接收以及移交。
72.在本发明的第三方案的部件供给装置中,也可以是,以第二转动轴为中心的中继部的转动半径小于以第一转动轴为中心的部件保持头的转动半径。
73.由于能够缩短第一转动轴与第二转动轴的轴间距离,因此能够使部件供给装置更小型化。
74.在本发明的第四方案的部件供给装置中,也可以是,第二转动轴的中心位于比第一转动轴的中心靠上方的位置。
75.通过将第二转动轴的中心配置于比第一转动轴的中心靠上方的位置,能够减小拾取部向搭载头移交第一部件的高度与中继部向搭载头移交第二部件的高度之差。由此,能够更容易地进行由拾取部以及中继部进行的部件向搭载头的移交。
76.在本发明的第五方案的部件供给装置中,也可以是,拾取部向搭载头移交第一部件的第一移交位置以及中继部向搭载头移交第二部件的第二移交位置位于相同的高度。
77.通过将第一移交位置以及第二移交位置配置于搭载头的上下方向上的可动范围内的高度,能够更容易地进行由拾取部以及中继部进行的部件向搭载头的移交。
78.在本发明的第六方案的部件供给装置中,也可以是,第一移交位置以及第二移交位置相互在水平方向上分离。
79.通过使第一移交位置与第二移交位置相互在水平方向上分离,能够更容易地进行
部件从拾取部以及中继部向搭载头的移交。
80.在本发明的第七方案的部件供给装置中,也可以是,拾取部具有使部件保持头向远离第一转动轴的中心的径向移动的保持头驱动机构。
81.通过利用保持头驱动机构使部件保持头移动,能够更容易地进行由拾取部进行的部件的接收以及移交。
82.在本发明的第八方案的部件供给装置中,也可以是,中继部具有从部件保持头接收第二部件并将该第二部件向搭载头移交的中继用部件保持头,中继用部件保持头与第二转动轴的中心的距离构成为恒定。
83.使中继用部件保持头与第二转动轴的中心的距离构成为恒定,而不需要使中继用部件保持头向远离第二转动轴的中心的径向移动的驱动机构,从而能够使部件供给装置更小型化。
84.在本发明的第九方案的部件供给装置中,也可以是,拾取部具有多个部件保持头,多个部件保持头中的至少一组部件保持头构成为相互朝向相反方向。
85.能够在一组部件保持头中的一方的部件保持头拾取所供给的部件时,通过拾取了第一部件的另一方的部件保持头将该第一部件向搭载头移交。由此,能够提高部件的移交效率。
86.在本发明的第十方案的部件供给装置中,也可以是,拾取部以及中继部构成拾取单元,该部件供给装置还具有对拾取单元的位置进行调整的单元移动机构。
87.通过利用单元移动机构对拾取单元的位置进行调整,能够利用部件保持头更精确地接收第一部件。另外,通过将拾取部以及中继部设为一个单元,能够使拾取部与中继部的相对位置恒定,从而能够更精确地进行第二部件从拾取部向中继部的移交。
88.在本发明的第十一方案的部件供给装置中,也可以是,该部件供给装置还具备部件拍摄部,该部件拍摄部具有沿上下方向延伸的镜筒并对被拾取部拾取的部件进行拍摄,镜筒配置于朝下状态的部件保持头的上方。
89.通过将部件拍摄部的镜筒配置于朝下状态的部件保持头的上方,能够在水平方向上使部件供给装置更小型化。
90.以下,参照附图对本公开的实施方式进行说明。另外,在各图中,为了便于说明,适当夸张地示出各要素。需要说明的是,本发明并不被该实施方式限定。
91.(实施方式)
92.首先,使用图1对本实施方式的部件搭载装置1的概要结构进行说明。图1是示出本发明的实施方式的部件搭载装置1的概要结构的俯视图。
93.如图1所示,部件搭载装置1具备部件供给装置2和部件搭载部7。部件供给装置2是将各种部件向部件搭载部7供给的装置。部件搭载部7是接收从部件供给装置2供给的部件并将该部件搭载于基板9的机构。以下,在图中,x方向以及y方向是在水平面内相互正交的方向,z方向是与x方向以及y方向正交的高度方向(上下方向)。
94.本实施方式的部件供给装置2与部件的种类相应地具备多个部件供给装置。部件供给装置2例如具有第一部件供给装置3和第二部件供给装置5。
95.在第一部件供给装置3中,例如,供给从晶片w1切出的部件(裸芯片)。由第一部件供给装置3供给的部件具有第一面以及与第一面相反的一侧的第二面。该部件例如形成为
长方体或立方体形状。第二部件供给装置5例如是托盘式馈送器、杆式馈送器、带式馈送器等。需要说明的是,第二部件供给装置5也可以是上述馈送器以外的部件供给装置。另外,第二部件供给装置5也可以不设置于部件搭载装置1。
96.部件搭载部7具备将部件搭载于基板9的搭载头11以及使搭载头11移动的头移动机构13。搭载头11设置为能够通过头移动机构13而在水平面(xy平面)内移动。头移动机构13例如是具有x轴工作台13a以及y轴工作台13b的正交坐标工作台。x轴工作台13a以及y轴工作台13b分别使搭载头11在x方向以及y方向上移动。
97.在本实施方式中,在部件搭载装置1设置有对搭载于基板9的部件进行识别的部件识别相机15以及对基板9进行识别的基板识别相机17。部件识别相机15例如设置在基板9与部件供给装置2之间。搭载头11接收到的部件在被部件识别相机15识别后,被搭载于基板9。此时,搭载头11通过基板识别相机17对基板9的位置进行识别而进行部件的搭载。本实施方式的基板识别相机17设置为能够与搭载头11一起在水平面内移动。例如,基板识别相机17与搭载头11一起设置在x轴工作台13a。
98.接下来,使用图2以及图3对第一部件供给装置3的结构进行说明。图2是示出第一部件供给装置3的概要结构的俯视图。图3是示出第一部件供给装置3的概要结构的沿x方向切断得到的剖视图。在图2中,为了便于说明,省略顶板19的一部分进行图示。
99.如图2或图3所示,本实施方式的第一部件供给装置3具备承载件保持部21、拾取单元23以及推顶器25。承载件保持部21保持对切出了部件的晶片进行支承的承载件27。拾取单元23拾取被承载件保持部21的承载件27保持的部件。本实施方式的拾取单元23对部件进行吸附保持。推顶器25将被承载件保持部21保持的裸芯片从下方朝向拾取单元23推出。本实施方式的推顶器25将裸芯片朝向上方顶起。在此,承载件27是在后述的扩展动作中具有伸缩性的片材。例如,承载件27是利用粘接力保持晶片w1的粘接片。
100.在本实施方式的第一部件供给装置3中,切出了部件的晶片w1以保持于承载件27的状态收容在箱仓(magazine)29内。箱仓29例如设置于比承载件保持部21靠外侧( y方向)的位置。箱仓29内的承载件27被承载件输送部31朝向承载件保持部21输送。输送的承载件27被承载件保持部21保持。
101.《承载件保持部》
102.图4是示出承载件保持部21的概要结构的俯视图。图5是示出未保持承载件27的状态下的承载件保持部21的概要结构的俯视图。如图4以及图5所示,本实施方式的承载件保持部21设置为能够在水平面内移动。承载件保持部21具有使承载件保持部21(后述的移动基座37)移动的保持部移动机构(移动部)33。
103.本实施方式的保持部移动机构33使承载件保持部21在一个方向(y方向)上移动。保持部移动机构33例如具有马达33a、进给丝杠33b以及导轨33c。进给丝杠33b通过基于马达33a的旋转运动而使承载件保持部21在y方向上直线移动。进给丝杠33b以沿y方向延伸的方式设置。导轨33c将承载件保持部21支承为能够在y方向上滑动移动。导轨33c例如以沿y方向延伸的方式设置,并对承载件保持部21的x方向两端部进行支承。
104.承载件保持部21具有保持承载件27的保持部主体35以及支承保持部主体35的移动基座(保持工作台)37。移动基座37是与进给丝杠33b连接且设置为能够在y方向上移动的基座构件。
105.图6是示出保持部主体35的概要结构的俯视图。图7是示出被承载件保持部21保持的承载件27的概要结构的俯视图。
106.如图6所示,在保持部主体35设置有沿上下方向贯通的开口45。保持部主体35以将开口45覆盖的方式对承载件27进行保持。本实施方式的保持部主体35具有按压构件39和支承基座41。本实施方式的开口45与保持于承载件27的晶片w1的形状相应地形成,且形成得比晶片w1大。开口45例如形成为比圆形的晶片w1大的圆形。
107.按压构件39是对保持承载件27的环状构件43(图7)进行按压的构件。通过利用按压构件39按压环状构件43,从而将承载件27保持于承载件保持部21。
108.支承基座41在按压构件39的下方与按压构件39连接。在支承基座41设置有对被承载件输送部31(图2)输送的承载件27的移动进行引导的承载件引导件41a。承载件引导件41a例如以沿y方向延伸的方式形成在支承基座41的x方向两端部,并对承载件27的x方向上的移动进行限制。另外,在支承基座41形成有向上方延伸并支承承载件27的支承部41b。在支承部41b的内侧形成有开口45。本实施方式的支承部41b形成为环状。
109.如图7所示,被保持部主体35保持的承载件27对已切出的晶片w1进行保持。本实施方式的承载件27的外缘部被环状构件(环)43保持。
110.图8是示出由承载件保持部21保持承载件27前的状态的图5的a-a线剖视图。图9是示出由承载件保持部21保持着承载件27的状态的图5的a-a线剖视图。
111.图2所示的箱仓29内的承载件27被承载件输送部31朝向承载件保持部21输送,并如图8所示那样插入按压构件39与支承基座41之间的空间。由此,承载件27的环状构件43成为覆盖开口45而被支承基座41支承的状态。
112.如图8以及图9所示,支承基座41经由杆49而与使支承基座41在上下方向上移动的驱动部47连接。从图8所示的状态驱动驱动部47,从而支承基座41与杆49一起向下方移动。如图9所示,按压构件39比支承部41b的上端部向下方移动,从而承载件27在被支承部41b沿面方向扩展(扩张)的状态下被承载件保持部21保持。通过将承载件27扩展,从而在晶片w1中切出的部件彼此的间隔扩大,能够容易地进行部件的拾取。
113.图10是示出移动基座37的概要结构的俯视图。图11是示出由承载件保持部21保持着承载件27的状态的图5的b-b线剖视图。图12是示出由承载件保持部21保持着承载件27的状态的图5的c-c线剖视图。
114.如图10所示,在移动基座37中,沿上下方向贯通的开口51设置在保持部主体35的开口45的下方。开口51的大小例如是保持部主体35的开口45以上的大小。通过开口51,推顶器25将配置在移动基座37的上方的承载件27内的部件从下方朝向拾取单元23(图3)推出。
115.在本实施方式的移动基座37中,在比开口51靠水平方向外侧的开口外位置设置有沿上下方向贯通的贯通部52。通过贯通部52,进行拾取单元23与推顶器25的水平方向上的位置的校正(校准)。贯通部52例如是设置在移动基座37内的开口。贯通部52并不限定于开口,也可以是将移动基座37的缘切除而成的结构。贯通部52在移动基座37中设置于内侧端部(-y方向端部)。
116.移动基座37设置为能够使保持部主体35(图6)在水平面内回旋。在移动基座37设置有使保持部主体35回旋的回旋用齿轮53。如图11所示,与回旋用齿轮53连接的马达54旋转,回旋用齿轮53与设置于保持部主体35的从动齿轮55啮合并旋转,由此,保持部主体35回
旋。
117.在移动基座37设置有多个(例如在四角)将保持部主体35(图6)支承为能够在水平面内旋转的支承辊57。支承辊57是在移动基座37上向上方延伸并使保持部主体35旋转的辊。如图12所示,支承辊57将在保持部主体35中向下方延伸而形成的回旋引导件59支承为能够回旋。如图5以及图12所示,支承辊57设置于比在开口45的外周部中沿周向延伸的回旋引导件59靠外侧的位置。
118.贯通部52形成为,即使在保持部主体35由于回旋用齿轮53而回旋的状态下,贯通部52的至少一部分也沿上下方向贯通。具体而言,贯通部52的外缘形成在比保持部主体35的外缘的旋转轨迹靠水平方向外侧的位置。由此,即使在保持部主体35回旋的状态下,也能够进行拾取单元23与推顶器25的校正。
119.在本实施方式的移动基座37设置有保持头更换器61。保持头更换器61是为了对拾取单元23中的后述的部件保持头77进行更换而设置的。关于保持头更换器61的详细的结构将后述。
120.《拾取单元》
121.图13是示出拾取单元23的概要结构的剖视图。如图3或图13所示,拾取单元23设置为能够通过单元移动机构(拾取移动部)63而在顶板19上移动。本实施方式的拾取单元23设置为能够在一个方向(x方向)上移动。
122.单元移动机构63(图1)例如具有马达63a、进给丝杠63b以及导轨63c。进给丝杠63b通过基于马达63a的旋转运动而使拾取单元23在x方向上直线移动。进给丝杠63b以沿x方向延伸的方式设置。导轨63c将拾取单元23支承为能够在x方向上滑动移动。导轨63c例如以沿x方向延伸的方式设置在顶板19上,并对拾取单元23的y方向两端部进行支承。
123.沿上下方向贯通的开口部65以沿x方向延伸的方式形成于顶板19。如图13所示,通过开口部65,拾取单元23拾取被承载件27保持的部件(裸芯片)。在本实施方式的构成拾取单元23的外廓的盖67的上表面设置有沿上下方向贯通的开口部69。通过开口部69,拾取单元23将拾取的部件向搭载头11(图3)移交。此时,搭载头11例如通过基板识别相机17(图1)对部件进行识别而从拾取单元23接收部件。
124.如图3所示,拾取单元23具备拾取部71、中继部73以及部件拍摄部(部件检测部)75(图13)。
125.《拾取部》
126.如图13所示,拾取部71拾取被承载件27保持的部件。具体而言,拾取部71拾取被推顶器25顶起的部件。拾取部71具有保持部件的部件保持头77,并通过部件保持头77拾取部件。具体而言,部件保持头77在前端部(下端部)对承载件27内的部件进行吸附保持,而使部件离开承载件27。
127.部件保持头77构成为能够通过第一移动机构79变更头的朝向。在本实施方式中,头的朝向是部件保持头77的前端部的朝向。部件保持头77构成为反复进行如下动作:在以朝下的状态拾取了第一部件后,通过第一移动机构79翻转而以朝上的状态向搭载头11(图3)移交。具体而言,朝下的部件保持头77在第一部件的第一面朝上的状态下拾取该第一部件。进而,使拾取到该第一部件的部件保持头77翻转为朝上,而在第一部件的第二面朝上的状态下向搭载头11进行移交。在此,被承载件27保持的部件成为第一面朝上的状态。
128.第一部件被部件保持头77以第一面朝上的状态从承载件27拾取第一面,并在以使第二面朝上的方式变更了朝向后,被向搭载头11移交。进而,第一部件被搭载头11以第一面朝下的状态(第二面朝上的状态)保持第二面,而以第一面朝下的状态向基板9搭载。即,第一部件是在倒装芯片安装的情况下供给的部件。
129.本实施方式的第一移动机构79是使部件保持头77回旋的回旋机构。第一移动机构79具有通过马达80而转动的第一转动轴81以及伴随于第一转动轴81的转动而回旋的回旋构件83。第一转动轴81使部件保持头77在上下方向上转动。回旋构件83例如是沿上下方向延伸的板状构件。
130.部件保持头77在回旋构件83中例如设置于比第一转动轴81的中心轴靠外端部(径向外侧的端部)的位置。本实施方式的拾取部71具有多个部件保持头77。多个部件保持头77中的至少一组部件保持头77构成为使头的方向相互朝向相反方向。例如,拾取部71具有两个部件保持头77,一方的部件保持头77与另一方的部件保持头77相互朝向相反方向。具体而言,一方的部件保持头77的前端部相对于另一方的部件保持头77的前端部朝向180
°
相反方向。在一方的部件保持头77朝下并拾取第一部件的同时,另一方的部件保持头77朝上并将部件向搭载头11移交。
131.本实施方式的部件保持头77设置为能够相对于头保持部85装卸。由此,部件保持头77例如能够与搭载的部件的种类相应地进行更换。部件保持头77经由头保持部85而与回旋构件83连接,并与回旋构件83一起回旋。
132.另外,本实施方式的部件保持头77具有使部件保持头77向远离第一转动轴81的中心的径向移动的保持头驱动机构87。关于保持头驱动机构87的具体的结构将后述。
133.《中继部》
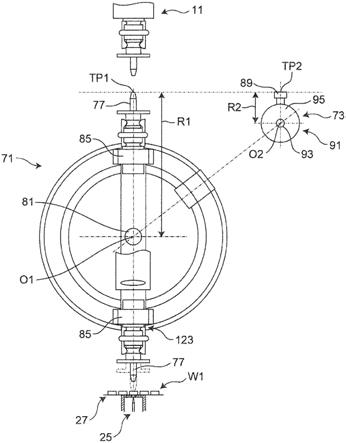
134.图14~图16是示出拾取部71以及中继部73的概要结构的侧视图。图14~图16所示的中继部73从部件保持头77接收被拾取部71(部件保持头77)以第一面朝上的状态拾取的第二部件,并将该第二部件以第一面朝上的状态向搭载头11移交。中继部73具有保持部件的中继用部件保持头89,通过中继用部件保持头89接收第二部件并将该第二部件向搭载头11移交。
135.第二部件被部件保持头77以第一面朝上的状态从承载件27拾取,并被以变更了第一面的朝向的状态(在本实施方式中为第一面朝斜下方的状态)向中继部73移交。第二部件被中继部73保持第二面,并在以使第一面朝上的方式变更了朝向后,被向搭载头11移交。进而,第二部件被搭载头11以第一面朝上的状态(第二面朝下的状态)保持第一面,并以第一面朝上的状态向基板9搭载。即,第二部件是在裸芯片贴装安装的情况下供给的部件。
136.中继部73构成为能够通过第二移动机构91变更头的朝向。具体而言,中继部73在部件保持头77从朝下的状态翻转而成为朝上的状态的中途接收第二部件。本实施方式的中继部73在部件保持头77朝斜上方的状态下接收第二部件(图16)。
137.本实施方式的第二移动机构91是使中继用部件保持头89回旋的回旋机构。第二移动机构91具有通过马达92(图18)而转动的第二转动轴93以及伴随于第二转动轴93的转动而回旋的回旋构件95。第二转动轴93使中继部73在上下方向上转动。回旋构件95例如形成为圆盘状。
138.在本实施方式中,第二转动轴93的中心o2配置于比第一转动轴81的中心o1靠上方
的位置。另外,如图15所示,以第二转动轴93为中心的中继部73的转动半径r2小于以第一转动轴81为中心的部件保持头77的转动半径r1。中继部73的转动半径r2构成为恒定。即,中继用部件保持头89与第二转动轴93的中心o2的距离构成为恒定。在本实施方式中,中继部73不具有相当于拾取部71中的保持头驱动机构87的机构。即,中继用部件保持头89不向远离第二转动轴93的中心o2的径向移动。
139.在本实施方式中,拾取部71向搭载头11移交第一部件的第一移交位置tp1以及中继部73向搭载头11移交第二部件的第二移交位置tp2位于搭载头11的上下方向上的可动范围内的高度。另外,移交位置tp1、tp2配置在基板识别相机17(图1)的焦距的范围内。移交位置tp1、tp2的高度例如可以是相同的高度(大致相同)。第一移交位置tp1以及第二移交位置tp2相互在水平方向上分离。
140.《部件拍摄部》
141.如图13所示,部件拍摄部75对被承载件27保持的部件进行拍摄。本实施方式的部件拍摄部75构成为能够通过单元移动机构63而与拾取单元23一起移动。部件拍摄部75相对于沿水平方向延伸的拍摄部主体97连接有沿上下方向延伸的镜筒99。镜筒99配置在朝下状态的部件保持头77的上方。在镜筒99内设置有照明部101、半反射镜103以及透镜(对物透镜)105。由照明部101照射的光通过半反射镜103而照射下方的部件。半反射镜103构成为透过来自上方的照明部101的光,而将来自下方的光朝向拍摄部主体97反射。
142.《保持头驱动机构》
143.图17是拾取单元23的俯视图。图18是图17的拆下了盖67的状态下的拾取单元23的俯视图。图19是示出保持头驱动机构87的概要结构的图。
144.如图18所示,拾取单元23在盖67(图17)内具有保持头驱动机构87。本实施方式的保持头驱动机构87是凸轮机构。如图18以及图19所示,保持头驱动机构87具有凸轮驱动马达107、第一凸轮109以及第二凸轮111。
145.凸轮驱动马达107使第一凸轮109以及第二凸轮111旋转。通过第一凸轮109的旋转,第一杆113以第一支承轴115为中心旋转。通过第二凸轮111的旋转,第二杆117以第二支承轴119为中心旋转。通过第一杆113的旋转,第一移动构件121在径向上移动。由此,与第一移动构件121连接的第一移动片123与第一移动构件121一起在径向上移动。通过第二杆117的旋转,第二移动构件125在径向上移动。由此,与第二移动构件125连接的第二移动片127与第二移动构件125一起在径向上移动。
146.如图15所示,本实施方式的第一移动片123配置于在部件保持头77成为朝下的状态时与部件保持头77连接的位置。由此,朝下的部件保持头77设置为能够与第一移动片123一起在上下方向上移动。
147.如图16所示,本实施方式的第二移动片127配置于在部件保持头77成为朝斜上方的状态时与部件保持头77连接的位置。由此,朝斜上方的部件保持头77设置为能够与第二移动片127一起在相对于上下方向倾斜的倾斜方向上移动。
148.图20是示出朝下的部件保持头77与第一移动片123连接的状态下的拾取部71的概要结构的侧视图。如图20所示,在头保持部85设置有对部件保持头77的径向上的移动进行引导的引导构件129。在引导构件129设置有在径向上与第一移动片123以及第二移动片127卡合的凸轮从动件131。凸轮从动件131在回旋构件83的回旋时沿圆筒凸轮132移动。
149.本实施方式的引导构件129例如设置为通过弹簧等弹性构件133而对部件保持头77向径向内侧施力。在部件的拾取时以及向中继用部件保持头89移交部件时以外的情况下,部件保持头77的转动半径恒定为r1。
150.在部件保持头77成为朝下的状态时,凸轮从动件131与第一移动片123连接,使部件保持头77与第一移动片123一起在上下方向上移动。在部件保持头77成为朝斜上方的状态时(图16),凸轮从动件131与第二移动片127连接,使部件保持头77与第二移动片127一起在径向上移动。
151.《保持头更换器》
152.图21是示出保持头更换器61的概要结构的侧视图。图22以及图23是示出保持头更换器61的概要结构的俯视图。如图21~图23所示,保持头更换器61具备收纳部件保持头77的收纳部135和限位器137。
153.在收纳部135例如收纳有多个种类的部件保持头77。本实施方式的收纳部135具有长边方向(x方向),并沿长边方向收纳部件保持头77。另外,收纳部135具有向上方开口的开口部141。通过开口部141来收纳部件保持头77。
154.限位器137覆盖收纳部135的开口部141的一部分。限位器137具有沿上下方向贯通的开口部143。在俯视观察下,开口部143具有大于部件保持头77的扩径部143a以及小于部件保持头77的小径部143b。在本实施方式中,沿长边方向交替地排列形成扩径部143a以及小径部143b。
155.限位器137通过限位器驱动部139的驱动而移动,以使扩径部143a或小径部143b位于收纳部135所收纳的部件保持头77的上方。通过限位器137移动,从而在小径部143b位于收纳部135所收纳的部件保持头77的上方的状态下,限位器137在上下方向上与部件保持头77的卡合部78a卡合。
156.本实施方式的保持头更换器61具有使收纳部135在上下方向上移动的升降部145。在进行部件保持头77的更换时,收纳部135通过升降部145而接近头保持部85(图24b)。
157.图24a是示出将部件保持头77安装于头保持部85前的状态的概要图。图24b是示出将部件保持头77安装在了头保持部85的状态的概要图。
158.如图24a所示,在将部件保持头77安装于头保持部85前的状态下,收纳部135配置于比保持晶片w1的承载件27的高度靠下方的位置。在本实施方式中,收纳于收纳部135的部件保持头77的上端部配置于比承载件27的高度靠下方的位置。
159.在进行部件保持头77的拆下或安装时,如图24b所示,收纳部135通过升降部145向上方移动。此时,头保持部85通过保持头驱动机构87向下方移动。在本实施方式中,头保持部85的上下方向上的移动量比收纳部135的上下方向上的移动量少。通过利用升降部145使收纳部135向上方移动,从而能够减少头保持部85的上下方向上的移动量。由此,能够使保持头驱动机构87的驱动结构更加简易。
160.在图24b的状态下,头保持部85的爪部85a在上下方向上与部件保持头77的凹部78b卡合。爪部85a例如被弹性构件85b向内侧施力。由此,头保持部85保持部件保持头77。爪部85a在头保持部85中向保持部件保持头77的一侧突出而形成。凹部78b在比部件保持头77的卡合部78a靠上方的位置向内侧凹陷而形成。
161.使用图25a~图25d对从头保持部85拆下部件保持头77的情况下的动作进行说明。
图25a~图25d是示出从头保持部85拆下部件保持头77的动作的保持头更换器61的剖视图。
162.如图25a所示,部件保持头77移动为位于保持头更换器61的开口部141的上方。
163.在本实施方式中,开口部141相对于部件保持头77的相对位置的y方向上的位置调整通过对保持头更换器61进行保持的承载件保持部21的保持部移动机构33(图2)来进行。另外,开口部141相对于部件保持头77的相对位置的x方向上的位置调整通过使拾取单元23移动的单元移动机构63来进行。
164.从图25a所示的状态起,部件保持头77向下方移动且收纳部135向上方移动,从而成为图25b所示的状态。如图25b所示,在保持头更换器61的第一开口部141a(图25a)插入部件保持头77的前端部。另外,在保持头更换器61的第二开口部141b(图25a)中配置部件保持头77的卡合部78a。
165.驱动限位器驱动部139,以使限位器137从图23的状态成为图22的状态。即,使限位器137移动,以使得从扩径部143a位于比卡合部78a的外缘靠外侧的位置的状态成为小径部143b位于比卡合部78a的外缘靠内侧的位置的状态。由此,如图25c所示,卡合部78a能够在上下方向上与小径部143b卡合。
166.从图25c的状态起,使头保持部85向上方移动并且使收纳部135向下方移动。此时,卡合部78a在上下方向上与小径部143b卡合,从而部件保持头77如图25d所示那样被从头保持部85拆下。由此,从头保持部85拆下部件保持头77的动作完成。
167.使用图26a~图26d对将部件保持头77安装于头保持部85的动作进行说明。图26a~图26d是示出将部件保持头77安装于头保持部85的动作的保持头更换器61的剖视图。
168.如图26a所示,头保持部85移动为位于部件保持头77的上方。
169.从图26a所示的状态起,头保持部85向下方移动且收纳部135向上方移动,而成为图26b所示的状态。如图26b所示,爪部85a在上下方向上与凹部78b卡合,从而部件保持头77保持于头保持部85。
170.驱动限位器驱动部139,以使限位器137从图22的状态成为图23的状态。即,使限位器137移动,以使得从小径部143b位于比卡合部78a的外缘靠内侧的位置的状态成为扩径部143a位于比卡合部78a的外缘靠外侧的位置的状态。由此,如图26c所示,卡合部78a成为在上下方向上不与小径部143b卡合的状态。
171.从图26c的状态起,使头保持部85向上方移动并且使收纳部135向下方移动。由此,将部件保持头77安装于头保持部85的动作完成。
172.《推顶器》
173.图27以及图28是示出本实施方式的推顶器25的概要结构的俯视图。如图27以及图28所示,在本实施方式中,推顶器25具有第一推顶器(第一顶起部)25a以及第二推顶器(第二顶起部)25b。第一推顶器25a以及第二推顶器25b例如与承载于承载件27的部件的种类等相应地选择性地使用。本实施方式的第一推顶器25a以及第二推顶器25b构成为能够通过选择部155而在y方向上移动。
174.推顶器25以沿上下方向延伸的方式形成,且构成为能够通过升降部156而上下移动。在本实施方式中,第一推顶器25a通过升降部156a而上下移动,第二推顶器25b通过升降部156b而上下移动。
175.第一推顶器25a以及第二推顶器25b一起设置于基座构件157。在本实施方式中,基
座构件157构成为能够通过推顶器移动机构(移动部)159而在x方向上移动。推顶器移动机构159使基座构件157在一个方向(x方向)上移动。推顶器移动机构159例如具有马达159a、进给丝杠159b以及导轨159c。进给丝杠159b通过基于马达159a的旋转运动而使基座构件157在x方向上直线移动。进给丝杠159b以沿x方向延伸的方式设置。导轨159c将基座构件157支承为能够在x方向上滑动移动。导轨159c例如以沿x方向延伸的方式设置,并对基座构件157的y方向两端部进行支承。
176.接下来,对部件搭载装置1的动作进行说明。图29是部件搭载装置1的控制部c1的概要框图。
177.如图29所示,控制部c1具有控制拾取单元23的拾取控制部c2、控制搭载头11的搭载头控制部c3、算出部c4以及存储与部件安装相关的信息的存储部m1。算出部c4算出拾取单元23以及搭载头11的位置。在本实施方式的存储部m1中还存储由部件拍摄部75以及基板识别相机17拍摄的信息。
178.控制部c1也可以通过处理器(处理电路)执行存储于存储器的程序,从而基于存储部m1的安装信息以预先决定的步骤进行部件安装。需要说明的是,也可以是在服务器等中保存安装信息,并通过通信向控制部c1提供安装信息的情况。
179.控制部c1驱动基板输送部8(图1)而在x方向(基板输送方向)上输送基板9,从而将基板9配置于规定的位置(基板输送步骤)。
180.通过部件供给装置2供给部件,该部件被搭载头11搭载(安装)于基板9。以下,对由第一部件供给装置3进行的部件的供给动作具体地进行说明。需要说明的是,对于由第二部件供给装置5进行的部件供给动作,由于与现有的部件供给动作相同,因此在此省略说明。
181.控制部c1驱动第一部件供给装置3的承载件输送部31(图2),将收纳于箱仓29的承载件27输送至承载件保持部21(承载件输送步骤)。当被输送至承载件保持部21时,承载件27插入按压构件39与支承基座41之间的空间。
182.承载件27在被输送至承载件保持部21后,被按压构件39(图8)扩展,承载件27被承载件保持部21保持(承载件保持步骤)。具体而言,控制部c1驱动驱动部47而使按压构件39向下方移动,从而对承载件27进行扩展。由此,承载件27成为被承载件保持部21保持的状态。
183.拾取控制部c2驱动拾取单元23,从承载件27的上方拾取承载于承载件27的部件(拾取步骤)。此时,控制部c1驱动推顶器25,从承载件27的下方将承载于承载件27的部件朝向拾取单元23顶起(顶起步骤)。在拾取步骤以及顶起步骤之前的阶段中进行拾取单元23的位置以及推顶器25的位置的校正动作。通过该校正动作,能够使拾取单元23的水平方向上的位置以及推顶器25的水平方向上的位置一致,从而能够更精确地进行拾取动作。
184.由拾取单元23拾取的部件被向搭载头11移交(移交步骤)。在移交步骤之前的阶段中进行搭载头11的位置以及拾取单元23的位置的校正动作。通过该校正动作,能够更精确地掌握搭载头11的水平方向上的位置以及拾取单元23的水平方向上的位置,因此能够更精确地进行部件的移交动作。在本实施方式中,通过拾取单元23的部件拍摄部75对推顶器25进行拍摄来进行位置的校正动作。
185.搭载头控制部c3驱动搭载头11(头移动机构13),使从拾取单元23接收到部件的搭载头11移动至基板9,并将部件搭载于基板9(部件搭载步骤)。在部件搭载步骤中,例如,使
用来自基板识别相机17的信息(例如搭载部件的位置等信息)来进行部件的搭载。
186.接下来,对拾取单元23的位置以及推顶器25的位置的校正动作具体地进行说明。图30是示出在承载件保持部21保持有承载件27的情况下的推顶器25的位置的校正动作的剖视图。图31是示出在承载件保持部21未保持承载件27的情况下的推顶器25的位置的校正动作的剖视图。
187.本实施方式的控制部c1选择性地实施通过比开口45、51靠水平方向外侧的开口外位置进行推顶器25的位置的校正动作的第一模式和通过开口45、51内的开口内位置进行推顶器25的位置的校正动作的第二模式。
188.在第一模式下,如图30所示,在承载件保持部21保持有承载件27的情况下,拾取单元23的位置以及推顶器25的位置的校正动作通过贯通部52来进行。
189.控制部c1驱动单元移动机构63(图1)以及推顶器25,使拾取单元23以及推顶器25移动。其结果是,成为拾取单元23(部件拍摄部75)位于贯通部52的上方且推顶器25位于贯通部52的下方的状态。进而,控制部c1驱动推顶器25(升降部156),使推顶器25向上方移动。
190.在本实施方式中,使推顶器25上升,直至推顶器25的上端部比承载件27的高度高。在推顶器25上升了的状态下,部件拍摄部75对推顶器25进行拍摄(第一检测步骤)。第一检测(拍摄)步骤在承载件保持步骤后进行。使用拍摄到的推顶器25的水平方向上的位置来进行位置的校正(第一校正步骤)。本实施方式的部件拍摄部75也作为对推顶器25的水平方向上的位置进行检测的检测部而发挥功能。
191.在第二模式下,如图31所示,在承载件保持部21未保持承载件27的情况下,拾取单元23的位置以及推顶器25的位置的校正动作通过承载件保持部21的开口45来进行。
192.控制部c1驱动单元移动机构63(图1)以及推顶器25,使拾取单元23以及推顶器25移动。由此,成为拾取单元23(部件拍摄部75)位于开口45的上方且推顶器25位于开口45的下方的状态。进而,控制部c1驱动推顶器25,使推顶器25向上方移动。
193.在本实施方式中,使推顶器25上升,直至推顶器25的上端部比保持有承载件27的情况下的承载件27的高度高。在推顶器25上升了的状态下,部件拍摄部75对推顶器25进行拍摄(第二检测步骤)。第二检测(拍摄)步骤在承载件保持步骤前进行。使用拍摄到的推顶器25的位置来进行位置的校正(第二校正步骤)。
194.接下来,对搭载头11的位置以及拾取单元23的位置的校正动作具体地进行说明。图32是进行搭载头11的位置以及拾取单元23的位置的校正动作时的承载件保持部21的概要结构图。
195.如图32所示,在进行搭载头11的位置以及拾取单元23的位置的校正动作时,在承载件保持部21安装校正用夹具147。校正用夹具147是用于进行搭载头11的位置以及拾取单元23的位置的校正动作的夹具。校正用夹具147例如在承载件保持部21未保持承载件27的状态下支承于支承部41b。校正用夹具147例如形成为平板状。
196.校正用夹具147具有第一基准标记149以及第二基准标记151。第一基准标记149是由部件拍摄部(第一拍摄部)75检测的标记。第二基准标记151是由基板识别相机(第二拍摄部)17检测的标记。本实施方式的第二基准标记151形成于沿上下方向延伸的柱153上。通过对第一基准标记149以及第二基准标记151进行检测,从而进行搭载头11的坐标系以及拾取单元23的坐标系的校正。具体而言,使用第一基准标记149以及第二基准标记151的相对的
位置关系(在本实施方式中为水平方向上的距离d1)进行搭载头11的坐标系以及拾取单元23的坐标系的坐标变换。
197.接下来,对拾取步骤以及移交步骤详细地进行说明。图33是示出部件保持头77、中继用部件保持头89以及部件拍摄部75的相对的位置关系的概要结构图。
198.如图33所示,作为拾取步骤以及移交步骤的前阶段,求出一方的朝下的部件保持头77与另一方的朝上的部件保持头77的相对的头间水平位置关系。该头间水平位置关系存储于存储部m1。在本实施方式中,求出部件拍摄部75的光轴l1与朝下的部件保持头77的相对的光轴-头间水平位置关系。具体而言,测量部件保持头77距部件拍摄部75的光轴l1的偏移量(offset)of1、of2。of1是朝下的状态的部件保持头77与光轴l1的水平方向上的距离,of2是朝上的状态的部件保持头77与光轴l1的水平方向上的距离。
199.并且,测量由基板识别相机17识别出的朝上的中继用部件保持头89的位置距推定为朝上的中继用部件保持头89的中心所在的推定位置ep1的偏移量(offset)of3。of3是推定位置ep1与朝上的中继用部件保持头89的位置之间的水平方向上的距离。of1、of2、of3存储于存储部m1(图29)。
200.图34示出由基板识别相机17对部件保持头77以及保持于部件保持头77的部件进行拍摄而得到的图像。如图34所示,在本实施方式中,of1由基板识别相机17测量。基板识别相机17在朝下的部件保持头77拾取部件并翻转为朝上的状态下,对保持于该部件保持头77的部件的部件位置p1进行拍摄。并且,基板识别相机17对未保持部件的状态下的该部件保持头77的头位置p2进行拍摄。由此,测量部件位置p1与头位置p2的水平方向上的偏移量,并将该偏移量设为of1。例如,部件位置p1是由基板识别相机17拍摄的部件的中心位置,头位置p2是由基板识别相机17拍摄的头的中心位置。
201.of2由基板识别相机17测量。基板识别相机17在光轴l1上移动,对朝上的状态的部件保持头77进行拍摄。of2例如是部件保持头77的中心位置与光轴l1的水平方向上的距离。
202.基板识别相机17向推定位置ep1移动,对朝上的中继用部件保持头89进行拍摄,从而测量of3。在此,推定位置ep1例如是距光轴l1规定的距离d2的位置。规定的距离d2例如是光轴l1与朝上的中继用部件保持头89之间的水平方向上的距离的设计值。
203.在多个部件保持头77中,将一方的部件保持头作为第一部件保持头77a而将另一方的部件保持头作为第二部件保持头77b进行说明。在此,将部件保持头77a朝下时的of1设为ofa1,将部件保持头77a朝上时的of2设为ofa2,将部件保持头77b朝下时的of1设为ofb1,将部件保持头77b朝上时的of2设为ofb2。
204.使用测量出的of1,算出部c4算出朝下的部件保持头77能够从承载件27拾取部件的目标位置op1。使用下述的数学式(1)算出部件保持头77a的目标位置opa1,使用下述的数学式(2)算出部件保持头77b的目标位置opb1。
205.【数学式1】
206.opa1=光轴l1的位置 ofa1
ꢀꢀꢀ
(1)
207.【数学式2】
208.opb1=光轴l1的位置 ofb1
ꢀꢀꢀ
(2)
209.使用测量出的of1、of2,算出部c4算出拾取部71(朝下的部件保持头77)位于目标位置op1时的朝上的部件保持头77的停止位置tp1。使用下述的数学式(3)算出部件保持头
77a朝下时的朝上的部件保持头77b的停止位置tpb1。使用下述的数学式(4)算出部件保持头77b朝下时的朝上的部件保持头77a的停止位置tpa1。
210.【数学式3】
211.tpb1=opa1-ofa1 ofb2
ꢀꢀꢀ
(3)
212.【数学式4】
213.tpa1=opb1-ofb1 ofa2
ꢀꢀꢀ
(4)
214.使用测量出的of1、of3,算出部c4算出拾取部71位于目标位置op1时的朝上的中继用部件保持头89的停止位置tp2。使用下述的数学式(5)算出中继用部件保持头89接收部件保持头77a拾取到的部件的情况下的、中继用部件保持头89的朝上的停止位置tpa2。使用下述的数学式(6)算出中继用部件保持头89接收部件保持头77b拾取到的部件的情况下的、中继用部件保持头89的朝上的停止位置tpb2。
215.【数学式5】
216.tpa2=opb1-ofb1 d2 of3
ꢀꢀꢀ
(5)
217.【数学式6】
218.tpb2=opa1-ofa1 d2 of3
ꢀꢀꢀ
(6)
219.对倒装芯片安装的情况下的拾取步骤以及移交步骤进行说明。图35a~图35f是示出倒装芯片安装的情况下的拾取动作以及移交动作的概要图。
220.首先,如图35a所示,通过部件拍摄部75对承载于承载件27的部件进行拍摄。部件拍摄部75在部件保持头77不位于部件拍摄部75的下方的状态下对部件进行拍摄(第一部件拍摄步骤)。
221.在第一部件拍摄步骤之后,如图35b所示,使回旋构件83(图13)回旋,以使部件保持头77a成为朝下。此时,驱动单元移动机构63,使拾取单元23移动,以使朝下的部件保持头77a位于目标位置opa1。具体而言,使拾取单元23从由部件拍摄部75拍摄到的位置移动ofa1的量。
222.进而,驱动保持头驱动机构87,使朝下的部件保持头77a向下方移动并拾取部件。在部件的拾取后,驱动保持头驱动机构87,使朝下的部件保持头77a向上方移动。
223.如图35c所示,使回旋构件83回旋,而将拾取到部件的朝下的部件保持头77a的姿态变更为朝上。在进行部件保持头77a的回旋的同时,使被部件保持头77b拾取的下一个部件移动。
224.通过部件拍摄部75,对接下来拾取的部件进行拍摄。部件拍摄部75在部件保持头77不位于部件拍摄部75的下方的状态下对部件进行拍摄(第二部件拍摄步骤)。
225.在第二部件拍摄步骤之后,如图35d所示,使回旋构件83(图13)回旋,以使部件保持头77b成为朝下。此时,驱动单元移动机构63,使拾取单元23移动,以使朝下的部件保持头77b位于目标位置opb1。具体而言,使拾取单元23从由部件拍摄部75拍摄到的位置移动ofb1的量。
226.算出部c4使用上述数学式(4)算出朝上的部件保持头77a的停止位置tpa1。使搭载头11向由算出部c4算出的停止位置tpa1移动并接收部件。此时,驱动保持头驱动机构87,使朝下的部件保持头77b向下方移动并拾取部件。在部件的拾取后,驱动保持头驱动机构87,使朝下的部件保持头77b向上方移动。这样,进行在利用部件保持头77b拾取部件的同时利
用部件保持头77a向搭载头11移交部件的动作(第一动作)。
227.接下来,如图35e所示,使回旋构件83回旋,而将拾取到部件的朝下的部件保持头77b的姿态变更为朝上。在进行部件保持头77b的回旋的同时,使被部件保持头77a拾取的部件移动。
228.通过部件拍摄部75,对接下来拾取的部件进行拍摄。部件拍摄部75在部件保持头77不位于部件拍摄部75的下方的状态下对部件进行拍摄(第三部件拍摄步骤)。
229.在第三部件拍摄步骤之后,如图35f所示,使回旋构件83(图13)回旋,以使部件保持头77a成为朝下。此时,驱动单元移动机构63,使拾取单元23移动,以使朝下的部件保持头77a位于目标位置opa1。具体而言,使拾取单元23从由部件拍摄部75拍摄到的位置移动ofa1的量。
230.算出部c4使用上述数学式(3)算出朝上的部件保持头77b的停止位置tpb1。使搭载头11向由算出部c4算出的停止位置tpb1移动并接收部件。此时,驱动保持头驱动机构87,使朝下的部件保持头77a向下方移动并拾取部件。在部件的拾取后,驱动保持头驱动机构87,使朝下的部件保持头77a向上方移动。这样,进行在利用部件保持头77a拾取部件的同时利用部件保持头77b向搭载头11移交部件的动作(第二动作)。
231.如上所述,在倒装芯片安装的情况下,交替地反复进行第一动作以及第二动作,而从承载件27向搭载头11供给部件。
232.对裸芯片贴装安装的情况下的拾取步骤以及移交步骤进行说明。图36a~图36h是示出裸芯片贴装安装的情况下的拾取动作以及移交动作的概要图。
233.首先,如图36a所示,通过部件拍摄部75对承载于承载件27的部件进行拍摄。部件拍摄部75在部件保持头77不位于部件拍摄部75的下方的状态下对部件进行拍摄(第四部件拍摄步骤)。
234.在第四部件拍摄步骤之后,如图36b所示,使回旋构件83(图13)回旋,以使部件保持头77a成为朝下。此时,驱动单元移动机构63,使拾取单元23移动,以使朝下的部件保持头77a位于目标位置opa1。具体而言,使拾取单元23从由部件拍摄部75拍摄到的位置移动ofa1的量。
235.进而,驱动保持头驱动机构87,使朝下的部件保持头77a向下方移动并拾取部件。在部件的拾取后,驱动保持头驱动机构87,使朝下的部件保持头77a向上方移动。
236.如图36c所示,使回旋构件83回旋,而将拾取到部件的朝下的部件保持头77a的姿态变更为朝上。在进行部件保持头77a的回旋的同时,使被部件保持头77b拾取的部件移动。
237.通过部件拍摄部75,对接下来拾取的部件进行拍摄。部件拍摄部75在部件保持头77不位于部件拍摄部75的下方的状态下对部件进行拍摄(第五部件拍摄步骤)。
238.如图36d所示,使回旋构件83(图13)回旋,以使部件保持头77a成为朝斜上方。此时,通过第二移动机构91(图14)的驱动,中继用部件保持头89成为朝向斜下方的状态。具体而言,部件保持头77a以及中继用部件保持头89成为在同一直线上彼此相对的状态。
239.进而,驱动保持头驱动机构87,使朝斜上方的部件保持头77a向斜上方(朝向中继用部件保持头89)移动并将部件向中继用部件保持头89移交。在部件的移交后,驱动保持头驱动机构87,使朝斜上方的部件保持头77a向斜下方移动。
240.接下来,如图36e所示,使中继用部件保持头89回旋为朝上,并使部件保持头77b回
旋为朝下。此时,驱动单元移动机构63,使拾取单元23移动,以使朝下的部件保持头77b位于目标位置opb1。具体而言,使拾取单元23从由部件拍摄部75拍摄到的位置移动ofb1的量。
241.算出部c4使用上述数学式(5)算出朝上的中继用部件保持头89的停止位置tpa2。使搭载头11向由算出部c4算出的停止位置tpa2移动并接收部件。此时,驱动保持头驱动机构87,使朝下的部件保持头77b向下方移动并拾取部件。在部件的拾取后,驱动保持头驱动机构87,使朝下的部件保持头77b向上方移动。这样,进行在利用部件保持头77b拾取部件的同时利用中继用部件保持头89向搭载头11移交部件的动作(第三动作)。
242.接下来,如图36f所示,使部件保持头77b回旋,通过部件拍摄部75对接下来拾取的部件进行拍摄。部件拍摄部75在部件保持头77不位于部件拍摄部75的下方的状态下对部件进行拍摄(第六部件拍摄步骤)。
243.接下来,如图36g所示,使回旋构件83(图13)回旋,以使部件保持头77b成为朝斜上方。此时,通过第二移动机构91(图14)的驱动,中继用部件保持头89成为朝向斜下方的状态。具体而言,部件保持头77b以及中继用部件保持头89成为在同一直线上彼此相对的状态。
244.进而,驱动保持头驱动机构87,使朝斜上方的部件保持头77b向斜上方(朝向中继用部件保持头89)移动并将部件向中继用部件保持头89移交。在部件的移交后,驱动保持头驱动机构87,使朝斜上方的部件保持头77b向斜下方移动。
245.接下来,如图36h所示,使中继用部件保持头89回旋为朝上,并使部件保持头77a回旋为朝下。驱动单元移动机构63,使拾取单元23移动,以使朝下的部件保持头77a位于目标位置opa1。具体而言,使拾取单元23从由部件拍摄部75拍摄到的位置移动ofa1的量。
246.算出部c4使用上述数学式(6)算出朝上的中继用部件保持头89的停止位置tpb2。使搭载头11向由算出部c4算出的停止位置tpb2移动并接收部件。此时,驱动保持头驱动机构87,使朝下的部件保持头77a向下方移动并拾取部件。在部件的拾取后,驱动保持头驱动机构87,使朝下的部件保持头77a向上方移动。这样,进行在利用部件保持头77a拾取部件的同时利用中继用部件保持头89向搭载头11移交部件的动作(第四动作)。
247.如上所述,在裸芯片贴装安装的情况下,交替地反复进行第三动作以及第四动作,而从承载件27向搭载头11供给部件。
248.需要说明的是,本发明并不限定于上述实施方式,而能够以其他各种方案实施。在上述实施方式中,测量部件位置p1与头位置p2的水平方向上的偏移量,并将该偏移量设为of1,但并不限定于此。例如,也可以对朝下的一方的部件保持头77翻转为朝上的状态下的部件保持头77的头位置进行拍摄,并将光轴l1与该头位置的相对的水平位置关系视为of1。
249.另外,of1由基板识别相机17测量,但并不限定于此。of1例如也可以由设置于部件保持头77的下方的相机测量。
250.另外,对校正拾取部71的水平方向上的位置以及由部件拍摄部75拍摄到的推顶器25的水平方向上的位置的例子进行了说明,但也可以不进行该校正。例如,部件拍摄部75也可以不进行该校正而仅对推顶器25的状态(异物的附着状态)进行确认。
251.另外,对部件保持头77通过第一移动机构79回旋且中继用部件保持头89通过第二移动机构91回旋的结构进行了说明,但并不限定于此。即,部件保持头77以及中继用部件保持头89也可以不是以第一转动轴81以及第二转动轴93为中心转动(回旋)的结构。部件保持
头77以及中继用部件保持头89例如也可以构成为能够通过机械臂等来变更头的朝向。
252.需要说明的是,通过适当组合上述各种实施方式中的任意实施方式,能起到各自所具有的效果。
253.本发明参照附图关联优选的实施方式而充分地进行了记载,但对于本领域技术人员而言,各种变形、修改是显而易见的。这种变形、修改应理解为,只要不脱离基于所附的技术方案的本发明的范围,就包括在其中。另外,实施方式的要素的组合、顺序的变化可以不脱离本公开的范围和思想而实现。
254.工业实用性
255.本发明的部件供给装置例如在拾取承载于承载件的部件并向将部件搭载于基板的搭载头供给部件的情况下是有用的。
256.附图标记说明
257.1:部件搭载装置,2:部件供给装置,3:第一部件供给装置,5:第二部件供给装置,7:部件搭载部,8:基板输送部,9:基板,11:搭载头,13:头移动机构,13a:x轴工作台,13b:y轴工作台,15:部件识别相机,17:基板识别相机,19:顶板,21:承载件保持部,23:拾取单元,25:推顶器,25a:第一推顶器,25b:第二推顶器,27:承载件,29:箱仓,31:承载件输送部,33:保持部移动机构,33a:马达,33b:进给丝杠,33c:导轨,35:保持部主体,37:移动基座,39:按压构件,41:支承基座,41a:承载件引导件,41b:支承部,43:环状构件,45:开口,47:驱动部,49:杆,51:开口,52:贯通部,53:回旋用齿轮,54:马达,55:从动齿轮,57:支承辊,59:回旋引导件,61:保持头更换器,63:单元移动机构,63a:马达,63b:进给丝杠,63c:导轨,65:开口部,67:盖,69:开口部,71:拾取部,73:中继部,75:部件拍摄部,77、77a、77b:部件保持头,78a:卡合部,78b:凹部,79:第一移动机构,80:马达,81:第一转动轴,83:回旋构件,85:头保持部,85a:爪部,85b:弹性构件,87:保持头驱动机构,89:中继用部件保持头,91:第二移动机构,92:马达,93:第二转动轴,95:回旋构件,97:拍摄部主体,99:镜筒,101:照明部,103:半反射镜,105:透镜,107:凸轮驱动马达,109:第一凸轮,111:第二凸轮,113:第一杆,115:第一支承轴,117:第二杆,119:第二支承轴,121:第一移动构件,123:第一移动片,125:第二移动构件,127:第二移动片,129:引导构件,131:凸轮从动件,132:圆筒凸轮,133:弹性构件,135:收纳部,137:限位器,139:限位器驱动部,141:开口部,141a:第一开口部,141b:第二开口部,143:开口部,143a:扩径部,143b:小径部,145:升降部,147:校正用夹具,149:第一基准标记,151:第二基准标记,153:柱,155:选择部,156、156a、156b:升降部,157:基座构件,159:推顶器移动机构,159a:马达,159b:进给丝杠,159c:导轨,c1:控制部,c2:拾取控制部,c3:搭载头控制部,m1:存储部,w1:晶片。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
