1.本发明涉及汽车大灯控制技术领域,尤其涉及一种保持汽车前照灯稳定的系 统及控制方法。
背景技术:
2.伴随汽车发展至今,车灯一直是整车相当重要一个部件,车灯的好坏很大程 度上影响到行车的安全,尤其是汽车的前照灯,在夜间行车时,汽车前照灯的运 行状态,直接影响驾驶员的安全驾驶。因此一个运行稳定,能给驾驶员提供良好 视野的前照灯是极为重要的。
3.但在有些特殊情况下,由于道路的颠簸,使得车身也会跟随颠簸晃动,这必 将极大影响车灯的照射区域,可能忽远忽近、左右摇摆,总之带给驾驶员的将是 一个及其不稳定的视野区域,因此若能使车灯照射区域时钟稳定在车前的某片区 域,或者在极端情况下减小这样的不稳定性,成为如今亟待解决的技术问题。
技术实现要素:
4.本发明公开的一种车灯控制系统及控制方法,解决了现有车灯在道路颠簸或 其他特殊情况下导致车灯的照射区域不稳定的问题,实现车灯照射角度不受车辆 本身的颠簸的影响,使照射区域始终保持在车前某片区域。
5.为达到上述目的,本发明的技术方案具体是这样实现的:
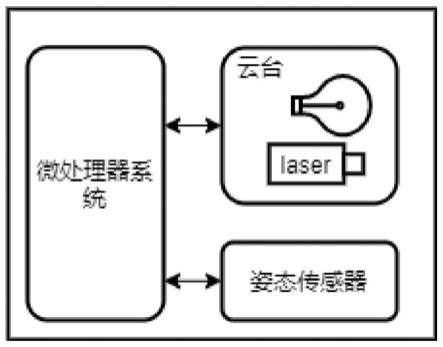
6.本发明一方面公开一种车灯控制系统,包括车灯、车身姿态传感器、车灯云 台、激光测距模块和微处理器模块,其中,车灯用以在夜晚或光较暗时用于行车 照明;车身姿态传感器用于获取当前车身姿态的状态信息,并发送至控制模块; 车灯云台用以让所述车灯稳定在预设的姿势;激光测距模块用以实时获取所述车 灯的实际照射距离与实际照射角度;微处理器模块用以接收并处理所述车身姿态 传感器发送的状态信息,并控制所述车灯云台。
7.进一步地,所述车灯云台为车灯姿势稳定器。
8.进一步地,所述车身姿态传感器实时获取车辆的三维加速度、三维角速度、 三维角度和磁场。
9.进一步地,所述微处理器模块包括mcu控制单元。
10.进一步地,所述激光测距模块和所述车灯均固定于所述车灯云台上。
11.进一步地,所述车灯云台包括x轴电机驱动器和y轴电机驱动器,分别用以 驱动x轴和y轴上的电机运动,以使所述车灯云台的姿势稳定。
12.本发明另一方面公开一种车灯控制系统的控制方法,包括以下步骤:
13.车身姿态传感器实时获取车辆的车身姿态,获得当前实际车身姿态角度β;
14.激光测距模块实时获取照射距离d,车灯位置高度h;
15.通过所述激光测距模块获取的照射距离d和车灯位置高度h,获取理论照射 距离
l,和当前照射夹角α;
16.微处理器模块通过上述参数实时计算车灯云台调节参数,实时调节车灯云台 位置,以保持车灯位置的稳定。
17.有益技术效果:
18.本发明公开一种车灯控制系统,包括车灯、车身姿态传感器、车灯云台、激 光测距模块和微处理器模块,其中,车灯用以在夜晚或光较暗时用于行车照明; 车身姿态传感器用于获取当前车身姿态的状态信息,并发送至控制模块;车灯云 台用以让所述车灯稳定在预设的姿势;激光测距模块用以实时获取所述车灯的实 际照射距离与实际照射角度;微处理器模块用以接收并处理所述车身姿态传感器 发送的状态信息,并控制所述车灯云台,解决了现有车灯在道路颠簸或其他特殊 情况下导致车灯的照射区域不稳定的问题,实现车灯照射角度不受车辆本身的颠 簸的影响,使照射区域始终保持在车前某片区域。
附图说明
19.为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的 附图作简单地介绍。
20.图1为本发明所述的一种车灯控制系统的系统结构图;
21.图2为本发明所述的一种车灯控制系统中激光测距模块的工作原理图;
22.图3为本发明所述的一种车灯控制系统中微处理器模块的具体电路结构图;
23.图4为本发明所述的一种车灯控制系统中车灯云台的具体电路结构图。
具体实施方式
24.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始 至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下 面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对 本发明的限制。
25.下面结合附图对本发明的实施方式进行详细说明。
26.本发明一方面公开一种车灯控制系统,参见图1-4,车灯控制系统包括车灯、 车身姿态传感器、车灯云台、激光测距模块和微处理器模块,其中,车灯用以 在夜晚或光较暗时用于行车照明,所述车灯固定安装在车灯云台上;车身姿态 传感器用于获取当前车身姿态的状态信息,并发送至控制模块,具体地,所述
27.本发明另一方面公开一种车灯控制系统的控制方法,包括以下步骤:
28.车身姿态传感器实时获取车辆的车身姿态,获得当前实际车身姿态角度β;
29.激光测距模块实时获取照射距离d,车灯位置高度h;
30.通过所述激光测距模块获取的照射距离d和车灯位置高度h,获取理论照射 距离l,和当前照射夹角α;
31.微处理器模块通过上述参数实时计算车灯云台调节参数,实时调节车灯云台 位置,以保持车灯位置的稳定。
32.本发明公开的车灯控制系统的具体工作过程为:
33.车身姿态传感器实时获取车辆的车身姿态(包括车辆的三维加速度、三维角 速度、三维角度和磁场),获得当前实际车身姿态角度β;激光测距模块获取照 射距离d,车灯
位置高度h,即可获一个理论照射距离l,和当前照射夹角α, 参见图2;
34.微处理器模块通过上述参数实时计算车灯云台调节参数,实时调节车灯云台 位置,以保持车灯位置的稳定。
35.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、
ꢀ“
具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特 征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书 中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的 具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适 的方式结合。
36.以上的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围 进行限定,在不脱离本发明设计精神的前提下,本领域普通工程技术人员对本发 明的技术方案做出的各种变形和改进,均应落入本发明的权利要求书确定的保护 范围内。
技术特征:
1.一种车灯控制系统,其特征在于,包括:车灯,在夜晚或光较暗时用于行车照明;车身姿态传感器,用于获取当前车身姿态的状态信息,并发送至控制模块;车灯云台,用以让所述车灯稳定在预设的姿势;激光测距模块,用以实时获取所述车灯的实际照射距离与实际照射角度;微处理器模块,用以接收并处理所述车身姿态传感器发送的状态信息,并控制所述车灯云台。2.根据权利要求1所述的一种车灯控制系统,其特征在于,所述车灯云台为车灯姿势稳定器。3.根据权利要求1所述的一种车灯控制系统,其特征在于,所述车身姿态传感器实时获取车辆的三维加速度、三维角速度、三维角度和磁场。4.根据权利要求1所述的一种车灯控制系统,其特征在于,所述微处理器模块包括mcu控制单元。5.根据权利要求1所述的一种车灯控制系统,其特征在于,所述激光测距模块和所述车灯均固定于所述车灯云台上。6.根据权利要求2所述的一种车灯控制系统,其特征在于,所述车灯云台包括x轴电机驱动器和y轴电机驱动器,分别用以驱动x轴和y轴上的电机运动,以使所述车灯云台的姿势稳定。7.一种如权利要求1-6任一项所述的车灯控制系统的控制方法,其特征在于,包括以下步骤:车身姿态传感器实时获取车辆的车身姿态,获得当前实际车身姿态角度β;激光测距模块实时获取照射距离d,车灯位置高度h;通过所述激光测距模块获取的照射距离d和车灯位置高度h,获取理论照射距离l,和当前照射夹角α;微处理器模块通过上述参数实时计算车灯云台调节参数,实时调节车灯云台位置,以保持车灯位置的稳定。
技术总结
本发明公开一种车灯控制系统及控制方法,包括车灯、车身姿态传感器、车灯云台、激光测距模块和微处理器模块,其中,车灯用以在夜晚或光较暗时用于行车照明;车身姿态传感器用于获取当前车身姿态的状态信息,并发送至控制模块;车灯云台用以让所述车灯稳定在预设的姿势;激光测距模块用以实时获取所述车灯的实际照射距离与实际照射角度;微处理器模块用以接收并处理所述车身姿态传感器发送的状态信息,并控制所述车灯云台,解决了现有车灯在道路颠簸或其他特殊情况下导致车灯的照射区域不稳定的问题,实现车灯照射角度不受车辆本身的颠簸的影响,使照射区域始终保持在车前某片区域。域。域。
技术研发人员:刘健 邓亮 黄琬祯 梁新强 谢正华
受保护的技术使用者:常州星宇车灯股份有限公司
技术研发日:2020.11.26
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。