1.本发明涉及一种用于车辆可运动构件的门把手总成以及一种用于这种门把手总成的把手体的操作速度的准许性检查的方法。
背景技术:
2.de 199 19 765 a1描述了一种机动车门锁,其具有锁销和将锁销保持在主锁定位和预锁定位的掣爪以及电动助开驱动装置,该电动助开驱动装置被接通以便将掣爪从锁销的主锁定位置或预锁定位置顶出,还具有电动助关驱动装置,其在锁销已到达预锁定位置后被接通,并且锁销接着通过电机转入主锁定位置,还具有控制电子装置,其中,该助关驱动装置具有驱动电动机和减速传动机构,减速传动机构在输出侧以驱动件接合至锁销,并且其中,与锁销的接合可脱开。
3.de 202 15 283 u1描述了一种机动车组件,其具有呈电、光电或机电方式的功能单元,它能够通过一个或多个电接线或光学连接线与机动车的另一单元相连,还具有设计用于感测压力或压力变化的压力传感器,其中,该压力或压力变化由机动车部件的变形引起,其中,由该压力传感器借助电信号线或光学信号线可传输与压力或压力变化关联的信号以控制拦挡单元,并且所述功能单元的和压力传感器的电线或光缆共同借助同一个连接单元可连接。
4.wo 2017/129333 a1描述了一种用于车辆中的可运动件例如像门或盖的门把手系统,具有可安置在可运动件上且用于可运动件运动的把手柄和可运动安装且用于操作用于可运动件的锁的把手杆。
5.为了改善舒适性,wo 2017/129333 a1规定,把手杆的至少一个第一操作位置可以在测量技术上通过第一传感器来测知,由此通过第一传感器的信号可触发该锁的电动操作。第一传感器的信号此时能够造成电动锁自动打开以便能拉开可运动件。
6.所述已知的现有技术的问题是,在危险情况下、尤其在车辆事故和/或碰撞情况下,锁被操作。这例如可能导致可运动构件在危险情况下通过锁被放开并且例如无法提供对车辆乘客的充分保护作用。
技术实现要素:
7.本发明基于以下任务,即,提出一种门把手总成以及一种用于这种门把手总成的方法,其在危险情况下尤其在车辆事故时或碰撞情况下禁止解锁车辆可运动构件。
8.根据本发明,该问题通过独立权利要求的主题来解决。有利的实施方式是从属权利要求的主题。
9.本发明基于以下总体构想,即,执行把手体操作速度的准许性检查以确定是否存在车辆准许运行状况或危险车辆状况、尤其车辆事故和/或碰撞情况。
10.根据本发明的用于车辆可运动构件的门把手总成包括把手体,其可以在静止位置
和操作位置之间沿行程运动。
11.车辆例如可以是无轨机动车、无轨电动车、无轨混动车和/或无轨插电混动车。
12.可运动构件例如可以是车门、尤其是外车门和/或车辆盖、尤其是外车盖。
13.把手体可以是门外把手。
14.把手体可以关于可运动构件可运动安装。在此情况下可以规定,当车辆使用者未执行把手体的机械操作时,该把手体安置在静止位置。最迟在操作位置可以规定,该把手体允许尤其通过机械的力传递和/或转矩传递来操作该可运动构件。由此例如可以让车辆使用者接近车辆内室。
15.在静止位置和操作位置之间的把手体行程可至少部分设计成直线状和/或至少部分设计成曲线状和/或弧形。把手体可在沿行程从静止位置运动到操作位置期间至少部分做平移运动和/或至少部分做转动运动。
16.根据本发明的门把手总成包括第一传感器装置和第二传感器装置。第一传感器装置能够在把手体从静止位置向操作位置的运动中在关于行程的第一触发位置被触发,其中,第二传感器装置能够在把手体从静止位置向操作位置的运动中在关于行程的第二触发位置被触发。
17.第一传感器装置和第二传感器装置可以布置成彼此间隔开。第一传感器装置和第二传感器装置尤其可以关于把手体行程相互间隔开布置。
18.关于把手体行程的第一触发位置可以在测量技术上通过第一传感器装置来测知。关于把手体行程的第二触发位置可以在测量技术上通过第二传感器装置来测知。在各自触发位置时对各自传感器装置在测量技术上的触发例如能以机械和/或电磁和/或光学和/或磁和/或电的方式进行。
19.第一触发位置和第二触发位置关于把手体的行程错开预先规定的行程距离。行程距离可以通过门把手总成的结构设计、尤其通过把手体的结构设计和/或通过引导把手体的导向机构的结构设计来规定。
20.可以规定,该行程距离小于在静止位置与操作位置之间的行程。可以规定,该行程距离小于在静止位置和操作位置之间的行程的一半。可以规定,第一触发位置关于行程与第二触发位置相比更靠近静止位置。可以规定,在第二触发位置与操作位置之间的关于行程的距离大于该行程距离。可以规定,第一触发位置和第二触发位置关于行程设计成在所述静止位置和操作位置之间。
21.可以规定,该门把手总成在校准模式中可被如下校准,即,通过沿行程从静止位置到操作位置地操作该把手体,整个行程的长度和/或行程距离通过该控制装置来确定。该控制装置为此可在校准模式中执行校准方法。所确定的整个行程和/或行程距离可以被存储在该控制装置中。这例如允许在已有构件误差范围内准确和/或单独检测行程距离。
22.可以规定,第一传感器装置通常在该把手体关于行程位于第一触发位置与操作位置之间时被触发。可以规定,第二传感器装置通常在该把手体关于行程位于第二触发位置与操作位置之间时被触发。
23.第一传感器装置和第二传感器装置与控制装置通信连接,以便将测量信号传输给该控制装置。可以规定,该测量信号被连续传输给该控制装置,和/或该控制装置连续查询和/或采集该测量信号。
24.根据本发明的门把手总成包括一种用于解锁或上锁车辆可运动构件的锁具,其中,该锁具与该控制装置通信连接。锁具可以通过该控制装置被控制。该锁具可以包括电动执行机构(例如伺服开启机构),其在第一位置时形成车辆可运动构件的上锁,使得该可运动构件无法相对于车辆运动。在电动执行机构的第二位置时,该车辆可运动构件可被解锁,使得该可运动构件可相对于车辆被运动。
25.控制装置被设计和/或编程用于执行把手体操作速度的准许性检查。在此可以规定,该控制装置通过该锁具仅当该把手体操作速度是准许时才允许解锁车辆可运动构件。如果把手体的操作速度是不准许的,尤其当该操作速度比车辆使用者的典型操作速度更快时,该控制装置可以阻止车辆可运动构件的解锁和/或通过锁具将车辆可运动构件上锁。通过把手体的操作速度,该控制装置可以判断是否存在车辆的准许运行状况或危险车辆状况。
26.由此,在危险状况下、尤其在车辆事故和/或碰撞情况下的车辆乘客安全性得到提升,因为防止了锁具的误操作/功能故障并且车辆可运动构件在危险情况下不进行不准许的运动、尤其是对车辆乘客有危险的运动。
27.通信连接在此可以是指,在两个相互通信连接的部件之间可以规定双向或单向数据连接,借此可以传输呈模拟形式或数字形式的电和/或光学的控制信号、调整信号和/或测量信号。在超过两个的部件之间的通信可以用一个总线系统实现。
28.本发明还涉及一种用于本发明门把手总成的把手体的操作速度的准许性检查的方法。
29.该控制装置从第一传感器装置的所传输的测量信号确定在第一触发时刻的第一触发信号,在第一触发时刻,该把手体关于行程位于第一触发位置。该控制装置从第二传感器装置的所传输的测量信号确定在第二触发时刻的第二触发信号,在第二触发时刻,该把手体关于行程位于第二触发位置。
30.该控制装置可以从第一传感器装置的所传输的测量信号确定第一触发信号的第一触发时刻。该控制装置可以从第二传感器装置的所传输的测量信号确定第二触发信号的第二触发时刻。
31.第一传感器装置的和/或第二传感器装置的触发信号例如可以通过测量信号跃变来鉴别。由此例如可以规定,当把手体关于行程经过各相应触发位置时,各相应传感器装置的测量信号从较低值(例如0值或低值)变化到较高值(例如1值或高值)或反之。这种测量信号跃变也可以被视为测量信号的关于时间的陡变。
32.该控制装置从第一触发时刻与第二触发时刻的时间差确定把手体操作速度是否是准许的,其中,如果把手体操作速度是准许的,则该控制装置传输用于解锁车辆可运动构件的解锁信号至锁具。可运动构件的解锁可以通过带有电执行机构的伺服开启机构进行。把手体操作速度可在其对应于由人力作用引起的典型操作速度时被视为准许。当操作速度比由人力作用造成的典型操作速度更快以致这种操作速度例如只能是由碰撞或事故过程产生时,把手体操作速度可被视为不准许。
33.可以规定,该控制装置确定、尤其是该控制装置在确定时间差之前确定是否存在第一触发信号和是否存在第二触发信号。在信号技术和/或编程技术上可以规定,第一触发信号和第二触发信号为此在信号技术和/或编程技术上利用“和”运算(und-verkn
ü
pfung)
关联。如果不存在第一触发信号或第二触发信号,则控制装置不传输用于解锁车辆可运动构件的解锁信号至锁具。“缺少触发信号”可以指明传感器装置的功能故障或损坏,因此,在这种情况下应该阻止可运动构件的解锁。通过这种冗余检查,可以进一步提高安全性功能。
34.可以规定在确定时间差时确定绝对值。
35.在本发明解决方案的一个有利改进方案中规定,假如把手体的操作速度是不准许的,则该控制装置将用于车辆可运动构件的上锁的上锁信号传输给锁具。也可以规定该控制装置启动车辆的多个单独可运动构件的上锁。也可以规定该控制装置执行车辆的所有可运动构件、尤其是所有车门和/或车盖的上锁。
36.在本发明解决方案的另一个有利实施方式中规定,该控制装置将所确定的时间差与存储在控制装置中的极限持续时间相比较,其中,该极限持续时间与预先规定的行程距离相关。极限持续时间例如可以从预先规定的行程距离和极限速度来确定。当时间差小于或对应于极限持续时间时,把手体的操作速度是不准许的。当该时间差大于该极限持续时间时,该把手体的操作速度是准许的。
37.在本发明解决方案的一个有利改进方案中规定,该控制装置从所确定的时间差和预先规定的行程距离确定把手体的操作速度,其中,该预先规定的行程距离被存储在该控制装置内。
38.该控制装置将所确定的把手体操作速度与存储在该控制装置中的极限速度相比较。当该操作速度大于或对应于预先规定的极限速度时,把手体操作速度是不准许的。当该把手体的操作速度低于极限速度时,该把手体的操作速度是准许的。
39.在本发明解决方案的另一个有利实施方式中规定,该行程距离借助计算、测量和/或模拟被确定,和/或该极限持续时间借助计算、测量和/或模拟被确定,和/或该极限速度借助计算、测量和/或模拟被确定。如此确定的行程距离和/或如此确定的极限持续时间和/或如此确定的极限速度可存储和/或被存在该控制装置中。
40.在本发明解决方案的一个有利改进方案中规定,该行程距离位于2mm至8mm范围内,尤其为4mm,和/或该极限持续时间位于4ms至16ms范围内,尤其为8ms,和/或该极限速度为500mm/s。
41.在2mm至8mm范围内的行程距离或者在4ms至16ms范围内的极限持续时间使得能够以期望的评估可靠性评估该测量信号。
42.整个行程例如可以为22mm至26mm,尤其为24mm。
43.在本发明解决方案的另一个有利实施方式中规定,至少一个传感器装置在触发之后将其它测量信号传输给该控制装置,其中,所述其它测量信号和/或其它测量信号的时间曲线在确定把手体操作速度的准许性时被一并考虑。尤其是所述其它测量信号的时间曲线可被用来改善该时间差和/或把手体操作速度的评估可靠性。
44.在此情况下可能有利的是,这种传感器装置形成霍尔传感器,其在触发时刻被触发后和在产生触发开始信号之后被进一步评估、尤其以连续和/或增量的方式被评估。
45.在本发明门把手总成的一个有利改进方案中规定,该控制装置被设计和/或编程用于执行本发明的方法以便检查把手体的操作速度的准许性。
46.在本发明门把手总成的一个有利改进方案中规定,第一传感器装置和/或第二传感器装置形成接触式传感器装置或非接触式传感器装置。
47.第一传感器装置和/或第二传感器装置可以设计成触控装置(tasteinrichtung)、开关装置或光学式、磁式、电容式或感应式传感器装置、特别是霍尔传感器装置。
48.可以规定,第一传感器装置被设计成触控装置或开关装置、尤其是微开关装置,其中,第二传感器装置被设计成霍尔传感器装置。
49.还可以规定把手体借助导向机构关于车辆可运动构件能够在静止位置和操作位置之间沿行程运动,其中,第一传感器装置和/或第二传感器装置安置在该导向机构上,和/或当把手体运动时该导向机构的至少局部区域在第一传感器装置以及第二传感器装置各自关于行程的触发位置触发第一传感器装置以及第二传感器装置。
50.该导向机构可以具有导向容座和导向腹板。该导向容座可以安置在车辆的可运动构件上。该导向容座可以至少部分或完全通过车辆的可运动构件构成。该导向腹板能刚性连接至把手体并且可运动安装在导向容座中,使得该把手体在静止位置和操作位置之间可以沿行程运动。在此情况下可以规定,至少一个导向腹板具有用于触发第一传感器装置和/或第二传感器装置的触发机构。
51.可以规定,该把手体可以通过机械连接件、尤其是博登拉线被连接至锁具,以便在功能故障的情况下或在控制装置失效时允许车辆可运动构件的机械解锁或上锁。
52.本发明的其它重要特征和优点来自从属权利要求、图和结合图的所属附图说明。
53.显然,前述的和以下还将解释的特征不仅在各自所指出的组合中、也在其它组合中或单独地可采用,而没有超出本发明的范围。
54.本发明的优选实施例在图中被示出并且在以下说明中被详细解释,其中,相同的附图标记涉及相同或相似的或功能相同的零部件。
附图说明
55.在此,附图分别示意性示出:
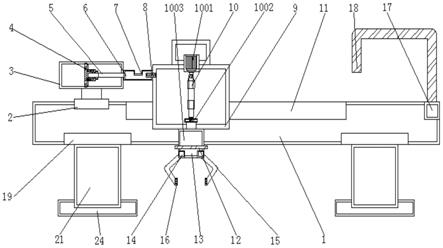
56.图1示出具有可运动构件和本发明的门把手总成的车辆的草图,
57.图2示出本发明的门把手总成的一部分的透视图,
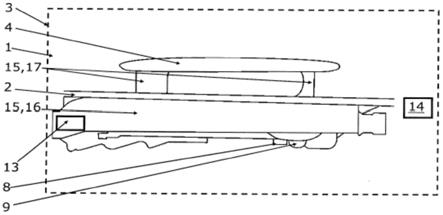
58.图3示出处于静止位置的把手体的草图,
59.图4示出处于第一触发位置、第二触发位置和操作位置的把手体的草图,
60.图5示出把手体的行程的草图,
61.图6示出本发明的门把手总成的第一传感器装置和第二传感器装置的测量信号的信号曲线的草图,
62.图7示出本发明的门把手总成的示意图。
具体实施方式
63.在图1中示出极其简化的车辆3,其具有可运动构件2、尤其是带有门饰板的车辆3外门。还示出一种用于车辆3的可运动构件2的门把手总成1。门把手总成1包括尤其设计成门外把手的把手体4。另外,导向机构15通过两个导向腹板17和一个导向容座16构成,其中,该导向容座16安置在可运动构件2上。两个导向腹板17彼此间隔开并且通过把手体4相互连接。两个导向腹板17至少部分穿过可运动构件2并且可运动安装在导向容座16中,使得把手体4能够在静止位置5和操作位置6之间沿行程7运动。导向容座16可以被设计成支承压环,
其能可分离地安置在可运动构件2上。
64.把手体4的静止位置5和操作位置6在图3和图4中被示例性示出。在静止位置5,把手体4至少部分贴靠可运动构件2,而把手体4在操作位置6至少部分与可运动构件2间隔开。
65.门把手总成1包括第一传感器装置8和第二传感器装置9,它们在图2的透视图中被示出。第一传感器装置8可以优选被设计成微开关装置。第二传感器装置9优选可以被设计成霍尔传感器装置。第一传感器装置8和第二传感器装置9例如至少部分布置在导向机构15中。
66.第一传感器装置8和第二传感器装置9与控制装置13通信相连,以便将测量信号传输给控制装置13。第一传感器装置8和第二传感器装置9能够在信号技术上通过“和”运算来关联。此外,锁具14设计用于解锁或上锁车辆3的可运动构件2,其中,该锁具14与控制装置13通信连接。所述部件之间的通信连接在图7中由虚线箭头表示。在此情况下可以规定,控制装置13控制该锁具14和/或控制装置13控制锁具14的执行机构20、尤其是电伺服驱动机构和或伺服开启机构。可以规定,把手体4通过机械连接机构21、尤其通过博登拉线可以连接至锁具14,以便在功能故障情况下或在控制装置13失效时准许机械解锁或上锁车辆3的可运动构件2。
67.第一传感器装置8能够在把手体4从静止位置5向操作位置6的运动中在关于行程7的第一触发位置10被触发。把手体4的第一触发位置10在图4中被举例示出。关于行程7的第一触发位置10的示意图在图5中被表明。
68.第二传感器装置9能够在把手体4从静止位置5向操作位置6的运动中在关于行程7的第二触发位置11被触发。把手体4的第二触发位置11在图4中被示例性示出。关于行程7的第二触发位置11的示意性视图在图5中被表明。
69.第一触发位置10和第二触发位置11关于把手体4的行程7错开预先规定的行程距离12。根据结构,行程距离12是一个基本上静态的数值。
70.控制装置13被设计和/或编程用于执行把手体4的操作速度的准许性检查。
71.为此,控制装置13可以从第一传感器装置8的所传输的测量信号中确定在第一触发时刻的第一触发信号,在第一触发时刻,把手体4关于行程7处于第一触发位置10。控制装置13从第二传感器装置9的所传输的测量信号中确定在第二触发时刻的第二触发信号,在第二触发时刻,把手体4关于行程7处于第二触发位置11。图6示例性示出第一传感器装置8和第二传感器装置9的测量信号,其中,测量信号轴18限定测量信号值(如低值和高值),时间轴19呈现该测量信号的时间变化。第一触发位置10例如可以通过第一传感器装置8的测量信号的陡变或变化来确定。第二触发位置11例如可以通过第二传感器装置9的测量信号的陡变或变化来确定。在图6中清楚看到,第一传感器装置8的测量信号和第二传感器装置9的测量信号形成错时的测量值信号值突变,其对应于各自的触发时刻。
72.控制装置13从第一触发时刻和第二触发时刻的时间差确定把手体4的操作速度是否是准许的,其中,假如把手体4的操作速度是准许的,则控制装置13将用于解锁车辆3的可运动构件2的解锁信号传输给锁具14。
73.在这里,控制装置13例如可以将所确定的时间差与存储在控制装置13中的极限持续时间相比较,其中,极限持续时间取决于预先规定的行程距离7。当该时间差小于或对应于极限持续时间时,把手体4的操作速度是不准许的,其中,当该时间差大于极限持续时间
时,把手体4的操作速度是准许的。
74.控制装置13例如也可以从所确定的时间差和预先规定的行程距离7确定把手体4的操作速度,其中,该预先规定的行程距离7存储在控制装置13中。控制装置13可以将所确定的把手体4操作速度与存储在控制装置13中的极限速度相比较,其中,当该操作速度大于或对应于预先规定的极限速度时,该把手体4的操作速度是不准许的,其中,当把手体的操作速度低于极限速度时,该把手体4的操作速度是准许的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。