清洁风力涡轮机叶片的方法和设备
1.相关申请的交叉引用
2.本技术要求美国专利申请62/81 1,785(2019年2月28日提交)的优先权,并且是该美国专利申请的非临时申请,其全部内容通过引用并入本文。
背景技术:
3.本文公开的主题涉及一种风力涡轮机检查和清洁系统。
4.风力涡轮机有多个叶片,从一个中央舱室伸出,该舱室由塔架悬挂在地面上方。当舱室外叶片收到风力作用沿轴旋转时,带动舱室中的发电机产生电力。功率转换效率取决于包括叶片的表面光滑度在内的多种因素。然而,在操作过程中,油泄漏、来自海洋的盐化空气、碎片、昆虫体污染叶片,这抑制了效率。
5.定期外观检查和清洁叶片可以修复缺陷并提高风力涡轮机效率。清洁通常由操作人员手动进行。然而,手动清洁工作通常耗时、昂贵并且具有一定危险性,难以按时执行。鉴于上述原因,风力涡轮机可能在相当长的时期内以低效的方式运行。因此,亟需一种改进的清洁系统用于开展上述作业。
6.以上讨论仅提供一般背景信息,并不旨在用于帮助确定所要求保护的主题的范围。
技术实现要素:
7.一种用于清洁和检查风力涡轮机叶片的机器人。机器人具有使用真空力附着到叶片上的模块。机器人还具有一个清洁作业模块,该清洁作业模块被分成由弹性区段连接的两个部分。清洁作业模块是弹性的,使得其适应叶片上的凹凸曲面。
8.在第一实施方案中,提供了一种用于清洁风力涡轮机叶片的机器人。机器人包括:吸附模块,其包括具有开放底部的吸附腔和围绕该开放底部的柔顺密封组件,其中该柔顺密封组件直接接触吸附叶片;真空吸附电机组件,其用于将空气从吸附腔排出,从而将开放的底部吸附到叶片表面;用于沿着表面移动机器人的装置;弹性清洁圈,其围绕机器人底侧上的开口;清洁作业模块,其包括覆盖件,覆盖件包括第一清洁作业腔体,所述第一清洁作业腔体通过弹性区段柔性地连接第二清洁作业腔体,覆盖件限定底部开口,弹性区段弹性弯曲将底部开口弯曲成凸起形状和凹陷形状;至少一个喷嘴,其布置在清洁作业模块内部,用于在底部开口处喷射加压水以清洁表面。
9.在第二实施方案中,提供了一种用于清洁风力涡轮机叶片的机器人。机器人包括:第一吸附模块和第二吸附模块,每个吸附模块包括具有开放底部的吸附腔和围绕该开放底部的弹性清洁圈,其中该弹性清洁圈接触表面;真空电机组件,用于将空气从吸附腔排出,从而将开放的底部粘附到表面;用于沿着表面移动机器人的装置;铰链将第一吸附模块弹性地连接到第二抽吸模块,使得机器人调节到表面上的非平面区域;清洁作业模块,其包括覆盖件,覆盖件包括第一清洁作业腔体,第一清洁作业腔体通过弹性区段柔性地连接第二清洁作业腔体,覆盖件限定底部开口,弹性区段弹性弯曲将底部开口弯曲成凸起形状和凹
陷形状,第一清洁作业腔体通过第一支撑件连接到第一吸附模块,第二清洁作业腔体通过第二支撑件刚性连接到第二吸附模块,从而清洁作业模块能够贴合到表面上的非平面区域;至少一个喷嘴,其布置在清洁作业模块内部,用于在底部开口处喷射加压水以清洁表面。
10.本发明的简要说明仅旨在根据一个或多个说明性实施方案提供本文公开的主题的简要概述,且不用作解释权利要求书或界定或限制本发明的范围的指导,本发明的范围仅由所附权利要求书界定。提供此简要描述是为了以简化形式介绍将在以下详细描述中进一步描述的概念的说明性选择。本简要描述不旨在标识所要求保护的主题的关键特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。所要求保护的主题不限于解决任何或全部问题的实现。
附图说明
11.为了理解本发明的特征的方式,可通过参考某些实施方案来详细描述本发明,其中一些实施方案在附图中示出。然而,应当注意,附图仅说明本发明的某些实施方案,且因此不应被视为限制其范围,因为本发明的范围涵盖其他同等有效的实施方案。附图不必按比例绘制,重点通常在于说明本发明的某些实施方案的特征。在附图中,在各个视图中,相同的数字用于指示相同的部分。因此,为了进一步理解本发明,结合附图阅读以下详细描述,其中:
12.图1a是机器人的一个实施方案的透视图;
13.图1b是图1a的机器人的顶视图;
14.图2a是图1a的机器人的后视图;
15.图2b是图2a的一部分的封闭视图示出了带有齿轮的铰链;
16.图3a、3b和3c是图1a的机器人的后视图,示出了具有齿轮的铰链的操作以使机器人具有弹性;
17.图4a是机器人的两个吸附腔的内部结构图;
18.图4b和4c是示出通过机器人的空气流的剖视图;
19.图5a和5b是机器人的仰视图,示出了具有四个轮的实施方案;
20.图6a和6b是机器人的仰视图,示出了具有两个传动系和两个脚轮的实施方案;
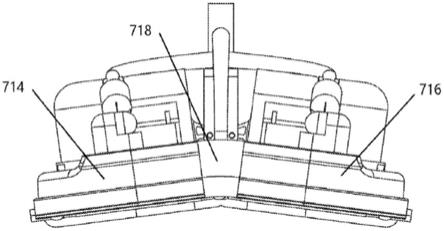
21.图7是机器人的一个实施方案的透视图;
22.图8a、8b和8c是机器人的前视图,示出了清洁作业模块的弹性变形;
23.图9a和9b是机器人的仰视图,示出了清洁作业模块;
24.图10a、10b和10c分别是清洁作业模块的主视图、透视图和仰视图,示出了具有圆形形状的实施方案;
25.图11a是机器人的透视图,示出了具有两个传动系和吸附腔的实施方案;
26.图11b和11c是图11a所示的机器人的实施方案的仰视图;
27.图11d是吸附腔的剖视图;
28.图11e是图11a所示的机器人的爆炸视图;
29.图12a和12b是机器人在清洁涡轮叶片时的描述。
具体实施方式
30.本公开提供了一种具有垂直移动性以清洁风力涡轮机叶片的清洁和检查设备。涡轮机叶片的表面非常复杂并且包括凸面和凹面。如果清洁机器人足够小,则叶片表面可以被视为是平坦表面,因为叶片上的凸、凹表面可以忽略不计。然而,如果机器人非常小,则机器人的清洁效率可能低得无法接受。为了解决叶片的弯曲表面与机器人的效率之间的冲突,本文提供了改进的机器人。
31.参考图1a和1b,机器人100包括清洁作业模块120以及通过支撑件112和114连接到清洁作业模块120的第一模块102和第二模块104。支撑件112、114对清洁作业模块120的分开区段施加向下的压力并且是独立弹性的。第一吸附模块102和第二吸附模块104通过带齿轮的铰链106连接。
32.如图2a和2b所示,两个齿轮200、202固定在机器人100的每个相应模块102、104上。模块102、104通过框架108连接,同时齿轮200、202啮合。机器人100的模块102、104以顺时针或逆时针方向枢转,同时框架108保持垂直。因此,机器人100可以比相同尺寸的一个实心件更好地贴合涡轮机叶片表面。图3a-3c示出了当机器人100贴合平坦表面(图3a)、凹面(图3b)和凸面(图3c)时的状态。
33.参考图4a,机器人100的每个模块102、104具有吸附腔402、404,该吸附腔具有真空电机组件403、405,以在相应的吸附腔内产生低压。每个吸附腔402、404内的空气由真空电机组件403、405抽取,使得吸附腔402、404内部的压力低于吸附腔402、404外部的压力。机器人100通过压力差被压到涡轮机叶片表面上。当将机器人100放置在表面上时,每个室402、404下面的弹性清洁圈406接触叶片表面。弹性清洁圈406围绕相应吸附腔的底部开口。弹性清洁圈406还防止机器人100外部的空气泄露进入吸附腔402、404。
34.参考图4b和4c,真空电机组件403、405包括抽吸电机408和推进器410,以引导气流通过歧管412流出相应的吸附腔。每个吸附腔具有空气入口500。空气通过过滤器414流入空气入口500,被真空电机组件403、405内部的推进器410压缩并排出歧管412。
35.参考图5a和5b,机器人100通过传动机构(例如,移动装置)沿涡轮叶片表面移动以清洁表面上的碎屑。传动机构耦合到驱动传动机构的传动电机502上。在图5a和5b的传动机构的实施方案中,存在四个全向轮(例如,麦克纳姆轮)501a、501b、503a和503b以及四个传动电机502,以驱动每个相应的轮。四个车轮分为两组;第一组包括轮501a、501b,而第二组包括轮503a、503b。在图5a-5b中,当第一组中的轮501a、501b旋转时,机器人100左右移动。当第二组中的轮503a、503b旋转时,机器人100前后移动。机器人100还可以通过独立地控制四个轮501a、501b、503a和503b中的每一个的旋转方向而在任何方向上移动或旋转。以这种方式,机器人100能够全方位移动。
36.图6a和6b示出了具有两履带600和两脚轮602的传动机构的实施方案。脚轮602用于平衡机器人100的每半个模块102、104。在一个实施方案中,当真空将机器人100吸附在叶片表面时,脚轮602被弹簧张紧以允许垂直移动。通过使用差速传动控制两个传动系600的电机的速度,整个机器人100可以前后移动并且围绕机器人100的中心点进行左右转弯或旋转。
37.参考图7,在一个实施方案中,管线702、704将水从连接器712输送至清洁作业模块的中空管。清洁作业模块120的覆盖件720被分成两个区段714、716,并且通过弹性材料718
(例如硅橡胶)连接,该弹性材料718可以贴合涡轮机叶片表面的曲率。在一个实施方案中,两个区段714、716关于弹性材料718对称地布置。区段714、716是基本呈脊状,并且可以由耐用塑料(例如刚性聚合物材料)形成。在一个实施方案中,供应管线702、704是脊状水管,并且通过区段714、716的球连接器712将铰链联接到抽吸模块102、104的铰链上。在另一个实施方案中,供应管线702、704是输送水的弹性软管。在平坦表面上,清洁作业模块120的底部开口与吸附腔402、404的底部开口共平面。图8a、8b和8c示出了清洁作业模块120的铰接运动。
38.参考图9a和9b,使用高压水来清洁风力涡轮机叶片的表面。高压水通过任何高压洗涤器设备供应到机器人100。高压水在连接器712处连接到机器人100并被引导到供应管线702、704中并分别送入底部开口的清洁作业模块120内部的喷嘴706、708(见图8)。在清洁作业模块120内部有两个喷嘴706、708,并且当供应高压水时,两个喷嘴可以自由旋转。在一个实施方案中,在机器人的前端和后端有四个刮板110。刮板110可以擦掉表面上的水迹。
39.图10a、10b和10c示出了具有圆形形状的清洁作业模块1001的另一个实施方案。在一个实施方案中,供应管线1003是将水从连接器输送到清洁作业模块1005的弹性中空管。在覆盖件1004下面有弹性清洁圈1002(例如,o形微纤维布),以清洁表面上的污垢。
40.图11a、11b和11c和11d示出了具有单个吸附模块1130、清洁作业模块1120和检查相机1114的机器人1100的实施方案。如图11b所示,模块1130包括两履带1101和一个弹性吸附腔1102。通过使用差速传动控制两个传动系1101的电机的速度,机器人1100可以前后移动并且围绕机器人1100的中心点进行左右转弯或旋转。在模块1130的底部,清洁圈1104围绕模块1130的下周边。清洁圈1104可以清洁叶片表面上的污垢并且还防止污染的水润湿传动系的踏面。清洁圈1104的内侧安装有刮板1103,以清洁吸附表面并保持传动系干燥。在图中所示的实施方案中,在前后内侧分别有两个刮板1103。在一个实施方案中,清洁圈1104是微纤维布,用于清洁叶片表面并防止水和空气进入弹性清洁圈1104的内侧。
41.在如图11b所示的一个实施方案中,清洁作业模块1120具有带有两个喷嘴706、708的模块。在清洁作业模块1120下方的刮擦器719由柔软且弹性的材料例如微纤维布制成,以去除污垢并贴合叶片表面的曲率。供应管线1112是将水从连接器输送到清洁作业模块1120的弹性中空管。
42.参考图11d,真空电机组件1106通过从机器人的接触表面和底侧之间的间隙吸入空气而在弹性吸附腔1102中产生真空。真空使机器人附着在表面上。弹性吸附腔1102中的真空状态通过柔顺密封组件1107和多个弹簧/导杆模块1105的变形来维持。柔顺变形帮助机器人1100附着到凸接触表面和凹接触表面。柔顺密封组件1107和弹簧/导杆模块1105的使用也考虑用于机器人100的双模块实施方案中。
43.图11e是机器人1100的分解视图,其示出了机器人壳体1110、空气过滤器1111、覆盖件1113、移动装置1115、刮板1103、清洁圈1104、弹簧/导杆模块1105、真空电机组件1106和柔顺密封组件1107。壳体1110形成机器人基部,该机器人基部具有中央隔间以容纳柔顺密封组件1107,使得柔顺密封组件1107可以在中央隔间的空腔内上下移动,而不是侧向移动。柔顺密封组件1107还包括环形安装板1107b,其由在四个角处使柔顺密封组件1107垂直移动的弹簧/导杆1105支撑,弹性壁1107a允许柔顺密封组件1107垂直移动。在一个实施方案中,弹性壁1107a由弹性气密织物或塑料或硅橡胶材料制成,该弹性壁在一端被夹在底部
环形安装板1107b周围,而在另一端被夹在壳体1110的中央隔间的顶板周围,从而在中央空腔内形成弹性吸附腔1102。柔顺密封圈1107c被夹在环形安装板1107b底侧,且易拆卸更换。在一个实施方案中,柔顺密封圈1107c由包裹在气密织物袋(例如,疏水材料、聚合物或尼龙材料)内的泡沫圈制成。弹性密封圈1107c围绕中心空腔的开口并与接触面相贴合以避免空气泄漏。弹簧/导杆模块1105抵靠叶片张紧柔顺密封组件1107,同时允许垂直移动。弹性密封组件1107被设计成提供宽范围的弹性变形,该弹性变形使机器人1100适应曲面(凹形和凸形两者)。
44.如图11d所示,真空电机组件1106通过从接触表面和柔顺密封圈1107c之间的间隙吸入空气而在弹性吸附腔1102中产生真空。空气通过弹性吸附腔1102流入过滤器1111以避免由灰尘和碎屑损坏真空电机组件1106的。空气从烟囱形排气装置排出,使得模块1130内部没有灰尘残留。柔顺密封组件1107提供更宽范围的柔顺,并且当机器人1100贴附到凸接触表面或凹接触表面时,通过弹簧/导杆模块1105和柔顺密封组件1107两者的弹性变形保持真空状态。
45.覆盖件1113覆盖整个模块1130以保护电子元件免受水和灰尘的影响。在覆盖件1113上有托架以固定用于清洁作业模块1120的供应管线1112。覆盖件1113上安装有rgb-d相机1114,以提供特写视频流和第一人称视图,供操作者监视清洁状态并检查叶片表面上的任何缺陷。
46.参考图12a和12b,脏水聚集在清洁作业模块120内,并随后沿叶片从清洁作业模块120的底部流动。机器人100被运送到风力涡轮机塔架顶部上的舱室1200并且被手动放置到风力涡轮机叶片1202上。供应管线1204向机器人100提供电力和水。在一个实施方案中,供应管线1204包括连接到机器人而不是机载真空电机组件403、405的抽吸软管。抽吸泵连接到抽吸软管。
47.本书面说明使用实例来公开本发明,包括最佳模式,并且还使得本领域的任何技术人员能够实践本发明,包括制造和使用任何装置或系统以及执行任何合并的方法。本发明的可取得专利的范围由权利要求限定,并且可以包括本领域技术人员想到的其他示例。如果这些其他实例具有与权利要求的字面语言没有区别的结构要素,或者如果它们包括与权利要求的字面语言无实质性差异的等效结构要素,则这些其他实例旨在处于权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
