1.本发明提供一种基于力反馈远程同步超声系统,属于医疗远程同步领域。
背景技术:
2.目前,远程医疗是互联网科技与医疗技术结合的现代产物,它可以包括很多的应用部分,例如:远程专家会诊,社区医疗服务,远程指导,远程培训,远程手术等等,现有通过远程的超声检测,需要进行检测控制,目前在操作端都是直接在板面上进行移动,通过同步远端的机械臂进行插座,操作端对远端的感知效果差,且缺少真实反馈,超声探测时,用力大小缺少远程的反馈,导致远程端病患受压,操作端不能够感知。
3.公开号cn107661111a公开了一种医疗设备系统、医疗设备的远程控制系统及方法,所述远程控制系统包括控制器。所述控制器接收远程终端发送的需验证的信息,对所述需验证的信息进行验证,当验证通过时,所述控制器控制所述医疗设备执行所述远程终端发送的操作命令;
4.公开号cn205667556u公开了一种远程超声医疗系统,包括超声诊断设备,ip摄像头,超声影像云服务器,远程医疗服务平台,远程医疗客户端;系统运用了视频编解码技术和ts流传输技术,运用云平台技术实现了大数据的无限扩容存储,还利用软件客户端技术开发了远程医疗的终端入口,不能够形成远端受力的反馈,操作端的手部感知力缺少真实性。
技术实现要素:
5.本发明一种基于力反馈远程同步超声系统,提供的一种通过远程压力采集,并通过无线传送将压力传递至操作端,通过操作端进行手感传递,提高操作同步真实性的同步系统。结构简单,使用方便。
6.本发明一种基于力反馈远程同步超声系统是这样实现的,本发明一种基于力反馈远程同步超声系统:包括底座、上固定架、操作部、外力反馈器,上固定架置于底座上方,且通过连接组件对应连接,上固定架、底座形成中空区域,操作部置于上固定架内侧,且延伸至两端,操作部包括用于手部操纵的驱动杆以及用于端部压力传递的传导头,底座上设置有多个外力反馈器,外力反馈器和传导头外侧面对应抵合,外力反馈器通过无线传送进行外力抵撑,传导头将外力反馈器提供的阻尼传递至驱动杆形成操作感知,外力反馈器呈环形分布,操作部回转置于上固定架内,所述传导头的内部压强可调节;
7.所述底座包括主体板、连接组件,连接组件等角度置于主体板上,主体板上设置有上压板,上压板和主体板之间预留间隙,上压板边缘设置有安装槽,安装槽为开口槽,连接组件对应卡装置于安装槽内,连接组件包括外支撑管、拉杆,拉杆置于安装槽内,且上压板底面对应抵合,外支撑管套置于拉杆上,外支撑管为弹簧管,且两端设置有密封垫,拉杆为内置有钢丝的橡胶棒车削而成,拉动低端嵌置有和上压板抵合的拉头,拉杆顶端设置有螺纹丝套,主体板内沿设置有内支撑环,内支撑环沿着进行延伸,上压板和主体板之间通过锥
面连接,上压板、主体板、内支撑环为一体结构,主体板底部设置有防滑胶条,上固定架对应套置于连接组件上,且通过外支撑管抵撑固定;
8.所述上固定架包括居中环、支撑架、防尘罩,支撑架为多臂结构,居中环置于支撑架中部,支撑架的多臂端部对应套置于拉杆端部,且通过外支撑管抵撑,拉杆端部对应设置紧固螺钉,支撑架的多臂端部对应的贯穿孔孔径大于拉杆外径,居中环内圈设置有球瓦,防尘罩卡套置于居中环内圈,且向上延伸,防尘罩为硅胶套,操作部对应置于固定环中部,且贯穿居中环、防尘罩,防尘罩和操作部之间密封连接,操作部相对居中环回转;
9.所述操作部的驱动杆贯穿居中环向上延伸,传导头置于上固定架和底座之间,传导头可拆卸置于驱动杆上,传导头为气囊,外侧壁上设置有卡槽,卡槽等角度设置,传导头底部设置有压力传感器,传导头外圆周面上设置有固定环,固定环等距置于传导头,传导头口部嵌置有封堵盖,封堵盖中部设置有导向套,封堵盖外侧壁和传导头口部内壁设置有卡嵌槽,封堵盖中部厚,两侧薄,封堵盖边缘折弯形成环状,封堵盖折弯形成的环状内壁设置有螺纹,驱动杆螺接置于封堵盖上,且和传导头密封连接,驱动杆为中空结构,双向泵置于驱动杆内,双休泵的端口通过内置气管延伸至传导头内,内置气管外侧壁设置有导向套,导向套为橡胶材质,蓄电池置于驱动杆内,双向泵的另一端口延伸至驱动杆内,驱动杆侧壁设置有呼吸窗,呼吸窗内侧设置有过滤网,呼吸窗和双向泵的另一端对应,驱动杆的端部设置有胶套,控制单元置于驱动杆内,控制按钮置于驱动杆端部,驱动杆侧壁设置有防脱环,蓄电池和控制单元、双向泵、控制按钮组合形成电控电路,控制按钮控制双向泵启停、抽吸;
10.所述传导头设置有多层结构,内层为丁基橡胶,外侧为人造pu革,丁基橡胶外圈绕缠有线体,线体交叉绕缠置于丁基橡胶外侧,传导头底部的压力传感器为无线传感器,无线传感器和控制单元形成数据交互,控制单元内设置有存储器、处理器、控制器,传导头内填充有固态流体,且填充至传导头一半容积;
11.所述外力反馈器包括用于接收远程信号的反馈器控制模块、驱动器,驱动器、反馈器控制模块组合形成控制主体,控制主体通过固定架安装固定置于底座上,驱动器内设置有电磁伸缩组件,伸缩杆置于电磁伸缩组件上,且贯穿驱动器,伸缩杆端部设置有连接帽,连接帽顶部设置有铰接耳,复位弹簧套置于伸缩杆上,且抵撑置于连接帽和驱动器之间,驱动器上设置有延长套,延长套套置于伸缩杆上,金属片一端铰接置于连接帽上的铰接架上,另一端置于驱动器侧壁,金属片弯曲形成弧形,且和传动头上的卡槽对应卡合;
12.所述金属片的端部通过紧固螺钉可调节置于驱动器上,驱动器侧壁设置有侧导向板,侧导向板设置有t形槽,滑块置于t形槽内,滑块中部设置有螺纹孔,侧导向板侧壁设置有多组限位条,金属片的端部设置有安装孔,紧固螺钉贯穿安装孔和滑块中部的螺纹孔螺接,金属片端部折弯形成和限位条对应的抵合部;
13.所述反馈器控制模块设置有无线收发器、处理器、控制器,无线收发器和远程设备传感器对应形成信号接受传输,处理器用于进行信号分析处理,控制器控制对应的驱动器工作;
14.本发明一种基于力反馈远程同步超声系统其远程同步反馈步骤如下:
15.步骤一,将远程超声检测机械臂和驱动杆形成同步数据连接,使得驱动杆的偏转能够操控远程超声检测机械臂工作;
16.步骤二,在远程超声检测机械臂的探头端设置多个压力传感器,且进行编号记录,
传感器和和外力反馈器对应形成数据传输,外力反馈器接收传感器压力信号,并进行分析,通过驱动器进行驱动,使的弹力片弯曲,对传导头进行推抵,将对应位置的压力进行传递,并通过驱动杆反馈至手部;
17.步骤三,传导头底部的压力传感器通过对远程端的压力进行变化分析,进行双向泵工作信号的导入并进行传导头内部压强调节变化,改变驱动杆偏转形成的阻尼触感,调节和远端人体适配的触感机理;
18.步骤四,多个外力反馈器同步作业,将远程传感器感知外力反馈至操作部,形成同步操作。
19.有益效果:
20.一、进行远程的压力的感知,并反馈至外力反馈器,进行对应的抵压,形成阻力传导,提高
21.操作手感的真实性;
22.二、传导头能够进行内部压强的调节,调节和远程病患体表适配的压力阻值,提高远程操作
23.控制的手部感受;
24.三、结构简单,使用方便。
附图说明
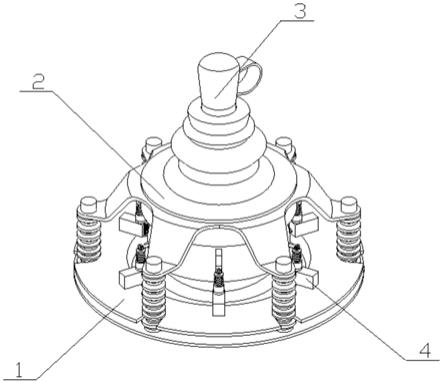
25.图1为本发明一种基于力反馈远程同步超声系统的立体结构图。
26.图2为本发明一种基于力反馈远程同步超声系统的结构示意图。
27.图3为本发明一种基于力反馈远程同步超声系统的截面示意图。
28.图4为本发明一种基于力反馈远程同步超声系统操作部的立体示意图。
29.图5为本发明一种基于力反馈远程同步超声系统操作部外力反馈器的立体结构图。
30.图6为本发明一种基于力反馈远程同步超声系统外力反馈器的立体结构图。
31.图7为本发明一种基于力反馈远程同步超声系统外力反馈器的结构示意图。
32.图8为本发明一种基于力反馈远程同步超声系统操作部的结构示意图,其仅仅展示了颞部结构示意。
33.图9为本发明一种基于力反馈远程同步超声系统底座板的立体结构图。
34.附图中:
35.1、底座;2、上固定架;3、操作部;4、外力反馈器;10、主体板;11、连接组件;20、居中环;21、支撑架;22、防尘罩;101、上压板;102、安装槽;103、内支撑环;30、传导头;31、驱动杆;32、防脱环;110、外支撑管;111、拉杆;301、卡槽;302、压力传感器;303、导向套;304、封堵盖;310、主体杆;311、密度垫板;312、蓄电池;313、控制单元;314、控制按钮;315、过滤网;316、双向泵;317、内置气管;40、控制主体;41、金属片;42、复位弹簧;43、伸缩杆;44、侧导向板;45、滑块;46、紧固螺钉;47、连接帽;48、延长套;401、驱动器;402、反馈器控制模块。
具体实施方式
36.下面结合附图对本发明进一步说明。
37.根据附图1-图9所示,本发明一种基于力反馈远程同步超声系统是这样实现的,本发明一种基于力反馈远程同步超声系统:包括底座1、上固定架2、操作部3、外力反馈器4,上固定架2置于底座1上方,且通过连接组件11对应连接,上固定架2、底座1形成中空区域,操作部3置于上固定架2内侧,且延伸至两端,操作部3包括用于手部操纵的驱动杆31以及用于端部压力传递的传导头30,底座1上设置有多个外力反馈器4,外力反馈器4和传导头30外侧面对应抵合,外力反馈器4通过无线传送进行外力抵撑,传导头30将外力反馈器4提供的阻尼传递至驱动杆31形成操作感知,外力反馈器4呈环形分布,操作部3回转置于上固定架2内,所述传导头30的内部压强可调节;
38.所述底座1包括主体板10、连接组件11,连接组件11等角度置于主体板10上,主体板10上设置有上压板101,上压板101和主体板10之间预留间隙,上压板101边缘设置有安装槽102,安装槽102为开口槽,连接组件11对应卡装置于安装槽102内,连接组件11包括外支撑管110、拉杆111,拉杆111置于安装槽102内,且上压板101底面对应抵合,外支撑管110套置于拉杆111上,外支撑管110为弹簧管,且两端设置有密封垫,拉杆111为内置有钢丝的橡胶棒车削而成,拉动低端嵌置有和上压板101抵合的拉头,拉杆111顶端设置有螺纹丝套,主体板10内沿设置有内支撑环103,内支撑环103沿着进行延伸,上压板101和主体板10之间通过锥面连接,上压板101、主体板10、内支撑环103为一体结构,主体板10底部设置有防滑胶条,上固定架2对应套置于连接组件11上,且通过外支撑管110抵撑固定;
39.所述上固定架2包括居中环20、支撑架21、防尘罩22,支撑架21为多臂结构,居中环20置于支撑架21中部,支撑架21的多臂端部对应套置于拉杆111端部,且通过外支撑管110抵撑,拉杆111端部对应设置紧固螺钉46,支撑架21的多臂端部对应的贯穿孔孔径大于拉杆111外径,居中环20内圈设置有球瓦,防尘罩22卡套置于居中环20内圈,且向上延伸,防尘罩22为硅胶套,操作部3对应置于固定环中部,且贯穿居中环20、防尘罩22,防尘罩22和操作部3之间密封连接,操作部3相对居中环20回转;
40.所述操作部3的驱动杆31贯穿居中环20向上延伸,传导头30置于上固定架2和底座1之间,传导头30可拆卸置于驱动杆31上,传导头30为气囊,外侧壁上设置有卡槽301,卡槽301等角度设置,传导头30底部设置有压力传感器302,传导头30外圆周面上设置有固定环,固定环等距置于传导头30,传导头30口部嵌置有封堵盖304,封堵盖304中部设置有导向套303,封堵盖304外侧壁和传导头30口部内壁设置有卡嵌槽,封堵盖304中部厚,两侧薄,封堵盖304边缘折弯形成环状,封堵盖304折弯形成的环状内壁设置有螺纹,驱动杆31螺接置于封堵盖304上,且和传导头30密封连接,驱动杆31为中空结构,双向泵316置于驱动杆31内,双休泵的端口通过内置气管317延伸至传导头30内,内置气管317外侧壁设置有导向套303,导向套303为橡胶材质,蓄电池312置于驱动杆31内,双向泵316的另一端口延伸至驱动杆31内,驱动杆31侧壁设置有呼吸窗,呼吸窗内侧设置有过滤网315,呼吸窗和双向泵316的另一端对应,驱动杆31的端部设置有胶套,控制单元313置于驱动杆31内,控制按钮314置于驱动杆31端部,驱动杆31侧壁设置有防脱环32,蓄电池312和控制单元313、双向泵316、控制按钮314组合形成电控电路,控制按钮314控制双向泵316启停、抽吸;
41.所述传导头30设置有多层结构,内层为丁基橡胶,外侧为人造pu革,丁基橡胶外圈绕缠有线体,线体交叉绕缠置于丁基橡胶外侧,传导头30底部的压力传感器302为无线传感器,无线传感器和控制单元313形成数据交互,控制单元313内设置有存储器、处理器、控制
器,传导头30内填充有固态流体,且填充至传导头30一半容积;
42.所述外力反馈器4包括用于接收远程信号的反馈器控制模块402、驱动器401,驱动器401、反馈器控制模块402组合形成控制主体40,控制主体40通过固定架安装固定置于底座1上,驱动器401内设置有电磁伸缩组件,伸缩杆43置于电磁伸缩组件上,且贯穿驱动器401,伸缩杆43端部设置有连接帽47,连接帽47顶部设置有铰接耳,复位弹簧42套置于伸缩杆43上,且抵撑置于连接帽47和驱动器401之间,驱动器401上设置有延长套48,延长套48套置于伸缩杆43上,金属片41一端铰接置于连接帽47上的铰接架上,另一端置于驱动器401侧壁,金属片41弯曲形成弧形,且和传动头上的卡槽301对应卡合;
43.所述金属片41的端部通过紧固螺钉46可调节置于驱动器401上,驱动器401侧壁设置有侧导向板44,侧导向板44设置有t形槽,滑块45置于t形槽内,滑块45中部设置有螺纹孔,侧导向板44侧壁设置有多组限位条,金属片41的端部设置有安装孔,紧固螺钉46贯穿安装孔和滑块45中部的螺纹孔螺接,金属片41端部折弯形成和限位条对应的抵合部;
44.所述反馈器控制模块402设置有无线收发器、处理器、控制器,无线收发器和远程设备传感器对应形成信号接受传输,处理器用于进行信号分析处理,控制器控制对应的驱动器401工作;
45.本发明一种基于力反馈远程同步超声系统其远程同步反馈步骤如下:
46.步骤一,将远程超声检测机械臂和驱动杆31形成同步数据连接,使得驱动杆31的偏转能够操控远程超声检测机械臂工作;
47.步骤二,在远程超声检测机械臂的探头端设置多个压力传感器302,且进行编号记录,传感器和和外力反馈器4对应形成数据传输,外力反馈器4接收传感器压力信号,并进行分析,通过驱动器401进行驱动,使的弹力片弯曲,对传导头30进行推抵,将对应位置的压力进行传递,并通过驱动杆31反馈至手部;
48.步骤三,传导头30底部的压力传感器302通过对远程端的压力进行变化分析,进行双向泵316工作信号的导入并进行传导头30内部压强调节变化,改变驱动杆31偏转形成的阻尼触感,调节和远端人体适配的触感机理;
49.步骤四,多个外力反馈器4同步作业,将远程传感器感知外力反馈至操作部3,形成同步操作。
50.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。