1.本发明涉及移动机器人技术领域,具体为一种可增强移动机器人地形适应性的可调节悬架机构。
背景技术:
2.全地形移动机器人作业环境复杂,为了精准完成任务,则需依靠平稳的移动平台,强劲的动力、可自动调节的底盘高度与车轮外倾角及力矩自平衡调节机构。但现有移动机器人较多没有配置减振机构,有减振机构的移动机器人不可自动调节底盘高度与车轮外倾角,且没有力矩自平衡调节机构,导致移动机器人左右车轮力矩的不均衡、车身抖动大,影响移动机器人的平顺行走、车载传感器的测量精度、负载能力,移动机器人不能更好地适应复杂路面。
3.如中国专利申请号为201910036527.2的一种移动机器人独立悬架结构,其结构简单,可靠性高,减振性能良好,可有效提升机器人行驶过程中的平顺性,保障机器人的正常工作,申请号为201711258906.3的双三角形悬架轮脚式全地形移动机器人,该机器人具有优良越障、行驶平顺性、主/被姿态调节功能,但其都不可自动调节底盘高度与车轮外倾角,且没有力矩自平衡调节机构。
4.如中国专利申请号为201410306884.3提出的一种用于四轮移动机器人底盘的悬架,其适用于各种轮式移动机器人可减轻底盘机架扭转负荷,能改善车轮与地面的附着性和行驶平顺性,但其属于非独立悬架,不能调节底盘高度及车轮外倾角。
5.如中国专利申请号为201910803529.x提出的一种采掘工作面巡检机器人及其应用,虽然该专利采用上摆臂、下摆臂所构成的双摆臂结构的独立悬架装置,但是上摆臂与下摆臂的臂长无法调节,无法辅助调整车轮外倾角来减小移动机器人的转向力,且没有力矩自平衡调节机构,导致移动机器人左右车轮力矩的不均衡、车身抖动大,影响移动机器人的平顺行走、车载传感器的测量精度、负载能力等。
6.又如中国专利申请号为200920181506.1的一种长度可调双横臂式悬架,提供一种上、下横臂能调整长度的长度可调双横臂式悬架,上下横臂支座均与外部车架焊接:推杆两端接有螺纹接头,推杆两端的螺纹接头呈反向,推杆一端的螺纹接头通过销轴与下横臂的夹角端转动连接,推杆另一端的螺纹接头通过销轴与摇块第一端转动连接,摇弹簧减振器另一端与减振器支座转动连接,减振器支座与外部车架焊接。但是该申请方案中大多采用焊接方式进行部件连接,在与外部车架焊接时费事费力,容易产生焊接失误,未将动力模块记载清楚,减振效果差,通过摇臂转动连接,摇臂质量不稳定,具体在应用到机器人身上时容易造成操作失误或者操作失灵,并不能直接使用。
技术实现要素:
7.为了解决上述技术问题,本发明提出了一种可增强移动机器人地形适应性的可调节悬架机构。
8.本发明所要解决的技术问题采用以下技术方案来实现:
9.一种可增强移动机器人地形适应性的可调节悬架机构,包括:
10.桁架组合车体;
11.可调悬架单元,设有两组,呈前后方向分布在桁架组合车体上,每组可调悬架单元均包括设置在桁架组合车体上的力矩自平衡分配机构、呈左右方向分布并与力矩自平衡分配机构连接的两个双横臂式减振模块;
12.驱动单元,设有四组,对应分布在桁架组合车体四周且与对应的双横臂式减振模块连接,每组驱动单元均包括依次连接的动力模块、传动模块、车轮模块,所述动力模块设置在桁架组合车体上。
13.优选的,所述桁架组合车体包括桁架本体、设置在桁架本体中部左右两侧的防护框、设置在桁架本体顶部四周的动力固定平台及上固定台、设置在桁架本体四周的竖向安装板、设置在桁架本体顶部前后两侧的车架盖板,所述双横臂式减振模块分别与上固定台、竖向安装板相连接,所述力矩自平衡分配机构设置在车架盖板上,所述动力模块设置在动力固定平台上。
14.优选的,每个双横臂式减振模块均包括减振器模块、减振引导机构、底盘高度电动调节机构,其中所述减振器模块包括减振器、分别与减振器连接的第一u型铰接凸耳、第二u型铰接凸耳,所述第一u型铰接凸耳设置在上固定台上,所述第二u型铰接凸耳与底盘高度电动调节机构连接。
15.优选的,所述减振引导机构包括设置在竖向安装板上的两个第一铰接座、与两个第一铰接座对应铰接的第一u型联动架及第二u型联动架、与第一u型联动架及第二u型联动架另一端对应铰接的两个第二铰接座,两个第二铰接座对应设置在传动模块上,所述底盘高度电动调节机构设置在第一u型联动架上。
16.优选的,所述第一u型联动架及第二u型联动架上设有开口端和封闭端,第一u型联动架及第二u型联动架上的开口端与两个第一铰接座对应铰接,第一u型联动架及第二u型联动架上的封闭端螺纹连接有螺纹调节式铰接台,所述螺纹调节式铰接台与两个第二铰接座对应铰接,所述第一u型联动架的一侧外侧壁上设有与力矩自平衡分配机构铰接的铰接凸耳。
17.优选的,所述底盘高度电动调节机构包括设置在第一u型联动架两端内侧壁上的两个滑轨、两端对应滑装在两个滑轨上的滑块、设置在第一u型联动架一侧上端面上的丝杆、设置在丝杆上且与滑块连接的丝杆螺母、与丝杆连接的编码电机,所述第二u型铰接凸耳设置在滑块上。
18.优选的,每个力矩自平衡分配机构均包括设置在车架盖板上的电控液压阻尼器及阻尼调节电机、与电控液压阻尼器两端对应连接的两个牵引联动拉杆、与两个牵引联动拉杆端部对应连接的两个联动铰接块,所述电控液压阻尼器上设有阻尼调节旋钮,所述阻尼调节电机通过柔性轴与阻尼调节旋钮连接,两个联动铰接块的端部与铰接凸耳对应铰接。
19.优选的,所述动力模块包括设置在动力固定平台上且依次连接的减速器支撑平台、孔输出减速器、伺服电机,所述传动模块与孔输出减速器连接。
20.优选的,所述传动模块包括安装在减速器支撑平台外侧且与孔输出减速器连接的第一传动轴、设置在竖向安装板上的第二传动轴、连接第一传动轴与第二传动轴的同步带、
与第二传动轴连接的万向节、与双横臂式减振模块连接的环形盘、与万向节连接且设置在环形盘上的轮轴连接座,所述同步带具有张紧功能,所述轮轴连接座与车轮模块连接。
21.优选的,所述车轮模块包括与轮轴连接座连接的轮毂、与轮毂连接的轮胎。
22.本发明的有益效果是:
23.本发明通过桁架本体结构,降低车身重量,提高车身刚度、承载性能、空间利用率;通过可调双横臂式悬架来调节车轮外倾角,自动调节移动机器人底盘高度,并可精度读出底盘调节高度,适应复杂路面,提高车身稳定及其作业精度;力矩自平衡分配模块有效防止车身侧倾,加快了振动的衰减频率,根据车轮扭矩实时监测数据,通过控制可控式液压阻尼器的阻尼速度调节力矩自平衡分配模块的刚度,增加牵引联动拉杆对减振摆臂的推力以增加车轮对地面的正压力,增大车轮与地面的摩擦力,同时也加快了车轮的回弹速度,缩小两轮之间的力矩差,进行力矩分配,提高其越野性能,力矩自平衡分配模块也可根据需要选装。
附图说明
24.下面结合附图和实施例对本发明进一步说明:
25.图1为本发明的整体立体结构示意图;
26.图2为本发明中第一u型联动架及底盘高度电动调节机构的结构示意图;
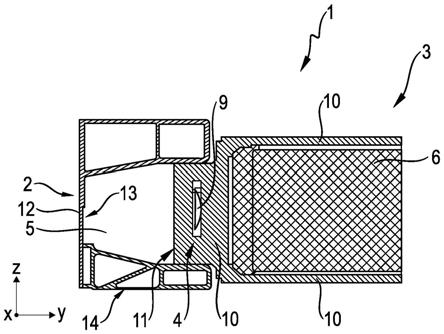
27.图3为本发明中力矩自平衡分配机构的结构示意图;
28.图4为本发明中力矩自平衡分配机构的安装分布图;
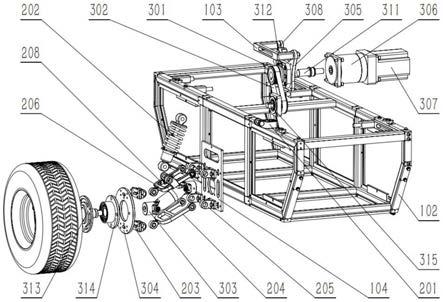
29.图5为本发明中驱动单元的爆炸结构示意图。
30.图中:1、桁架组合车体;101、防护框;102、桁架本体;103、动力固定平台;104、竖向安装板;105、上固定台;106、车架盖板;2、可调悬架单元;201、第一u型铰接凸耳;202、减振器;203、第二铰接座;204、第二u型联动架;205、第一铰接座;206、第一u型联动架;207、第二u型铰接凸耳;208、滑块;209、铰接凸耳;210、滑轨;211、螺纹调节式铰接台;212、丝杆;213、丝杆螺母;214、编码电机;215、法兰衬套;216、电控液压阻尼器;217、柔性轴;218、阻尼调节电机;219、牵引联动拉杆;220、限位座;221、联动铰接块;222、阻尼调节旋钮;3、驱动单元;301、带轮电磁离合器;302、同步带;303、万向节;304、环形盘;305、减速器支撑平台;306、孔输出减速器;307、伺服电机;308、张紧螺杆;309、轮胎;310、轮毂;311、第一传动轴;312、一号轴承安装座;313、轮轴连接座;314、二号轴承安装座;315、第二传动轴。
具体实施方式
31.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本发明进一步阐述。
32.如图1至图5所示,一种可增强移动机器人地形适应性的可调节悬架机构,包括桁架组合车体1、可调悬架单元2、驱动单元3,所述桁架组合车体1设有一组,所述可调悬架单元2设有两组,所述驱动单元3设有四组,两组可调悬架单元2分布在桁架组合车体1前后两侧,四组驱动单元3分布在桁架组合车体1四周处。
33.具体的,如图1、图4所示,所述桁架组合车体1包括防护框101、桁架本体102、动力固定平台103、竖向安装板104、上固定台105、车架盖板106。
34.其中,所述防护框101设有两个,对应分布在桁架本体102中间两侧处,防护框用于对移动机器人上的电池进行安装和防护;所述动力固定平台103设有四个,对应分布在桁架本体102顶部四周处;所述竖向安装板104设有四个,对应分布在桁架本体102左侧前后两端、右侧前后两端处;所述上固定台105设有四个,对应分布在桁架本体102顶部四周处;所述车架盖板106设有两个,对应分布在桁架本体102顶部前后两侧处。
35.具体的,如图1、图2、图3所示,每组可调悬架单元2均包括两个双横臂式减振模块及一个力矩自平衡分配机构。所述力矩自平衡分配机构对应设置在车架盖板106上,两个分布在力矩自平衡分配机构的左右两侧且与力矩自平衡分配机构左右两端对应连接。
36.每个双横臂式减振模块均包括第一u型铰接凸耳201、减振器202、第二铰接座203、第二u型联动架204、第一铰接座205、第一u型联动架206、第二u型铰接凸耳207、滑块208、铰接凸耳209、滑轨210、螺纹调节式铰接台211、丝杆212、丝杆螺母213、编码电机214。
37.其中,所述第一u型铰接凸耳201、减振器202、第二u型铰接凸耳207构成了减振器模块。具体的,所述第一u型铰接凸耳201安装在上固定台105上,所述减振器202的两端与第一u型铰接凸耳201、第二u型铰接凸耳207对应连接,所述第二u型铰接凸耳207设置在滑块208上。
38.其中,所述第二铰接座203、第二u型联动架204、第一铰接座205、第一u型联动架206构成了减振引导机构。具体的,所述第一铰接座205设有两个,所述第二铰接座203设有两个;两个第一铰接座205上下对应安装在竖向安装板104上,所述第二u型联动架204、第一u型联动架206上的开口端对应铰接在两个第一铰接座205上;更进一步地,所述第二u型联动架204、第一u型联动架206上的封闭端对应螺纹连接有两个螺纹调节式铰接台211,两个螺纹调节式铰接台211与两个第二铰接座203对应铰接,两个第二铰接座203对应安装在驱动单元3上,所述铰接凸耳209安装在第一u型联动架206的一侧外侧壁上并与力矩自平衡分配机构连接。
39.所述减振引导机构保持车轮与地面垂直,同时通过旋转螺纹调节式铰接台211实现上第二u型联动架的长度来调节车轮外倾角,以适应不同地形。
40.其中,所述滑块208、滑轨210、丝杆212、丝杆螺母213、编码电机214构成了底盘高度电动调节机构,具体的,所述滑轨210设有两个对称设置在第一u型联动架206的两内侧壁上,所述滑块208的两端滑装在两个滑轨210上,所述丝杆212安装在第一u型联动架206的一侧,所述丝杆螺母213安装在丝杆212上且与滑块208连接,所述编码电机214与丝杆212连接。通过控制编码电机214的旋转,带动丝杆212以控制滑块208的位置来调节第一u型联动架206的角度,从而调节底盘高度,并通过编码电机214的转动圈数来读出滑块208的位移,以读出第一u型联动架206的摆角,从而换算出底盘高度,用以匹配不同地面,同时丝杆212为底盘高度电动调节机构提供自锁功能。
41.每个力矩自平衡分配机构均包括法兰衬套215、电控液压阻尼器216、柔性轴217、阻尼调节电机218、牵引联动拉杆219、限位座220、联动铰接块221、阻尼调节旋钮222。具体的,所述电控液压阻尼器216沿左右方向安装在车架盖板106上,所述阻尼调节旋钮222设置在电控液压阻尼器216上;所述阻尼调节电机218同样安装在车架盖板106上,并通过柔性轴217与阻尼调节旋钮222连接;所述牵引联动拉杆219设有两个,对应连接在电控液压阻尼器216的两端,所述牵引联动拉杆219的另一端与联动铰接块221螺纹连接,所述联动铰接块
221与铰接凸耳209铰接,时牵引联动拉杆219与法兰衬套215配合可滑动,法兰衬套215与上固定台105配合安装,限位座220与上固定台105螺纹连接。
42.进一步的,所述力矩自平衡分配机构可选装。在复杂路面行走时,车轮受到来自地面的冲击力,作用力通过驱动单元3传递到可调悬架单元2,作用力经过减振器202,大部分被损耗,桁架组合车体1上所受到的作用力减小,提高了桁架组合车体1的稳定性;当底盘高度不足时,可通过控制编码电机214来调节第一u型联动架206的摆角来调节底盘高度,提高移动机器人的通过性,当路面平整时,可降低底盘高度,提高移动机器人的行走速度;当车轮受到来自地面的冲击力时,车轮会弹起,使其与地面之间的压力减小,摩擦力减小,通过控制阻尼调节电机218,使得电控液压阻尼器216的阻尼速度增大,会给车轮一个向下的推力以增大摩擦力或使车轮快速回弹,实现力矩自动分配同时也增加了移动机器人的操控。
43.每组驱动单元3均包括驱动与传动可隔离的传动模块、交错平行悬挂式动力模块、车轮模块,动力由动力模块输出,经传动模块到达车轮模块。
44.具体的,所述动力模块包括伺服电机307、孔输出减速器306、减速器支撑平台305。其中,所述孔输出减速器306两端分别连接着伺服电机307、减速器支撑平台305。所述动力模块平行交错铰接在动力固定平台103一端的轴上,并悬挂平行交错分布在车身前后内部,减小移动机器人轮距及动力模块对车身内部空间的占有率,所述动力模块可绕动力固定平台103一端的轴转动,便于动力模块的拆装及带传动的张紧。
45.具体的,所述传动模块包括带轮电磁离合器301、同步带302、万向节303、环形盘304、张紧螺杆308、第一传动轴311、一号轴承安装座312、轮轴连接座313、二号轴承安装座314、第二传动轴315、同步带轮。其中,所述同步带302的两端对应与带轮电磁离合器301上的上带轮、同步带轮连接,所述同步带302上设有为摆架式的张紧机构,该张紧机构具体为张紧螺杆308,所述张紧螺杆308上具有双螺母,一端与减速器支撑平台305使用双螺母夹紧连接,另一端与动力固定平台103另一转轴铰接,通过旋拧双螺母,使减速器支撑平台305转动,调节同步带轮中心距已达到张紧目的,也便于同步带的安装;所述一号轴承安装座312设有两个,一个安装在减速器支撑平台305的外侧,另一个安装在竖向安装板104的下部,所述第一传动轴311与装在减速器支撑平台305外侧的一号轴承安装座312内的轴承配合安装,且两端与孔输出减速器306、带轮电磁离合器301对应连接;所述第二传动轴315与安装在竖向安装板104下部的一号轴承安装座312内的轴承配合安装,且一端与同步带轮相连,另一端与万向节303相连;所述万向节303的另一端与轮轴连接座313相连;所述轮轴连接座313与二号轴承安装座314内轴承配合安装,且与车轮模块连接;所述二号轴承安装座314安装在环形盘304外侧,环形盘304与双横臂式减振模块中减振引导机构的两个第二铰接座203连接。
46.具体的,所述车轮模块包括与轮轴连接座313连接的轮毂310、与轮毂310连接的轮胎309。
47.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。