技术特征:
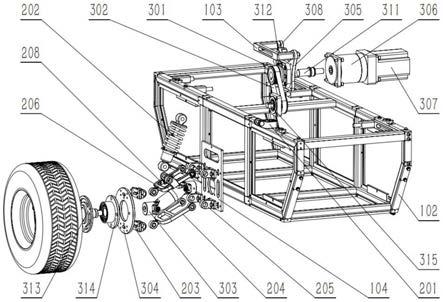
1.一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:包括:桁架组合车体(1);可调悬架单元(2),设有两组,呈前后方向分布在桁架组合车体(1)上,每组可调悬架单元(2)均包括设置在桁架组合车体(1)上的力矩自平衡分配机构、呈左右方向分布并与力矩自平衡分配机构连接的两个双横臂式减振模块;驱动单元(3),设有四组,对应分布在桁架组合车体(1)四周且与对应的双横臂式减振模块连接,每组驱动单元(3)均包括依次连接的动力模块、传动模块、车轮模块,所述动力模块设置在桁架组合车体(1)上。2.根据权利要求1所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述桁架组合车体(1)包括桁架本体(102)、设置在桁架本体(102)顶部四周的动力固定平台(103)及上固定台(105)、设置在桁架本体(102)四周的竖向安装板(104)、设置在桁架本体(102)顶部前后两侧的车架盖板(106),所述双横臂式减振模块分别与上固定台(105)、竖向安装板(104)相连接,所述力矩自平衡分配机构设置在车架盖板(106)上,所述动力模块设置在动力固定平台(103)上。3.根据权利要求2所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:每个双横臂式减振模块均包括减振器模块、减振引导机构、底盘高度电动调节机构,其中所述减振器模块包括减振器(202)、分别与减振器(202)连接的第一u型铰接凸耳(201)、第二u型铰接凸耳(207),所述第一u型铰接凸耳(201)设置在上固定台(105)上,所述第二u型铰接凸耳(207)与底盘高度电动调节机构连接。4.根据权利要求3所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述减振引导机构包括设置在竖向安装板(104)上的两个第一铰接座(205)、与两个第一铰接座(205)对应铰接的第一u型联动架(206)及第二u型联动架(204)、与第一u型联动架(206)及第二u型联动架(204)另一端对应铰接的两个第二铰接座(203),两个第二铰接座(203)对应设置在传动模块上,所述底盘高度电动调节机构设置在第一u型联动架(206)上。5.根据权利要求4所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述第一u型联动架(206)及第二u型联动架(204)上均设有开口端和封闭端,第一u型联动架(206)及第二u型联动架(204)上的开口端与两个第一铰接座(205)对应铰接,第一u型联动架(206)及第二u型联动架(204)上的封闭端螺纹连接有螺纹调节式铰接台(211),所述螺纹调节式铰接台(211)与两个第二铰接座(203)对应铰接,所述第一u型联动架(206)的一侧外侧壁上设有与力矩自平衡分配机构铰接的铰接凸耳(209)。6.根据权利要求4所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述底盘高度电动调节机构包括设置在第一u型联动架(206)两端内侧壁上的两个滑轨(210)、两端对应滑装在两个滑轨(210)上的滑块(208)、设置在第一u型联动架(206)一侧上端面上的丝杆(212)、设置在丝杆(212)上且与滑块(208)连接的丝杆螺母(213)、与丝杆(212)连接的编码电机(214),所述第二u型铰接凸耳(207)设置在滑块(208)上。7.根据权利要求5所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:每个力矩自平衡分配机构均包括设置在车架盖板(106)上的电控液压阻尼器(216)及阻尼调节电机(218)、与电控液压阻尼器(216)两端对应连接的两个牵引联动拉杆(219)、
与两个牵引联动拉杆(219)端部对应连接的两个联动铰接块(221),所述电控液压阻尼器(216)上设有阻尼调节旋钮(222),所述阻尼调节电机(218)通过柔性轴(217)与阻尼调节旋钮(222)连接,两个联动铰接块(221)的端部与铰接凸耳(209)对应铰接。8.根据权利要求2所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述动力模块包括设置在动力固定平台(103)上且依次连接的减速器支撑平台(305)、孔输出减速器(306)、伺服电机(307),所述传动模块与孔输出减速器(306)连接。9.根据权利要求8所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述传动模块包括安装在减速器支撑平台(305)外侧且与孔输出减速器(306)连接的第一传动轴(311)、设置在竖向安装板(104)上的第二传动轴(315)、连接第一传动轴(311)与第二传动轴(315)的同步带(302)、与第二传动轴(315)连接的万向节(303)、与双横臂式减振模块连接的环形盘(304)、与万向节(303)连接且设置在环形盘(304)上的轮轴连接座(313),所述同步带(302)具有张紧功能,所述轮轴连接座(313)与车轮模块连接。10.根据权利要求9所述的一种可增强移动机器人地形适应性的可调节悬架机构,其特征在于:所述车轮模块包括与轮轴连接座(313)连接的轮毂(310)、与轮毂(310)连接的轮胎(309)。
技术总结
本发明涉及移动机器人技术领域,具体为一种可增强移动机器人地形适应性的可调节悬架机构,包括:桁架组合车体;可调悬架单元,设有两组,呈前后方向分布在桁架组合车体上,每组可调悬架单元均包括设置在桁架组合车体上的力矩自平衡分配机构、呈左右方向分布并与力矩自平衡分配机构连接的两个双横臂式减振模块;驱动单元,设有四组,对应分布在桁架组合车体四周且与对应的双横臂式减振模块连接。本发明通过桁架本体结构,降低车身重量,提高车身刚度、承载性能、空间利用率;通过可调双横臂式悬架来调节车轮外倾角,自动调节移动机器人底盘高度,并可精确调节底盘调节高度,适应复杂路面,提高车身稳定性及其作业精度。提高车身稳定性及其作业精度。提高车身稳定性及其作业精度。
技术研发人员:汪步云 胡汉春 许德章
受保护的技术使用者:安徽工程大学
技术研发日:2022.01.28
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。