1.本实用新型涉及机械加工设备技术领域,特别是涉及一种工业机器人。
背景技术:
2.目前工业机器人的防护等级普遍较低,无法应用于清洁度要求较高的使用场景,且当使用工况恶劣时,会导致工业机器人的使用寿命缩短,甚至无法使用。
技术实现要素:
3.基于此,本实用新型提供一种防护等级高的工业机器人。
4.一种工业机器人,包括:
5.第一驱动件;
6.动力臂,与所述第一驱动件连接,所述第一驱动件用于驱动所述动力臂绕所述第一驱动件的轴向转动;
7.第二驱动件;
8.安装座,与所述第二驱动件连接,所述第二驱动件用于驱动所述安装座绕所述第二驱动件的轴向转动,所述第二驱动件的轴向与所述第一驱动件的轴向垂直;以及
9.防护罩,所述第一驱动件和所述第二驱动件均设置于所述防护罩内。
10.在其中一个实施例中,所述防护罩包括相连接的第一防护罩和第二防护罩,所述第一驱动件设置于所述第一防护罩内,所述第二驱动件设置于所述第二防护罩内。
11.在其中一个实施例中,所述第一防护罩包括第一子防护罩、第二子防护罩以及连接所述第一子防护罩和所述第二子防护罩的第一紧固件,所述第一驱动件设置于所述第一子防护罩和所述第二子防护罩围合形成的空腔内,所述第二防护罩与所述第一子防护罩连接,所述第一防护罩还包括第一密封件,所述第一密封件设置于所述第一子防护罩和所述第二子防护罩的连接处。
12.在其中一个实施例中,所述第二防护罩包括第三子防护罩、第四子防护罩以及连接所述第三子防护罩和所述第四子防护罩的第二紧固件,所述第二驱动件设置于所述第三子防护罩和所述第四子防护罩围合形成的空腔内,所述第一防护罩与所述第三子防护罩连接,所述第二防护罩还包括第二密封件,所述第二密封件设置于所述第三子防护罩和所述第四子防护罩的连接处。
13.在其中一个实施例中,所述第一驱动件包括第一驱动主体和第一动力轴,所述第一驱动主体设置于所述第一防护罩内,所述第一动力轴的一端与所述第一驱动主体连接,所述第一动力轴的另一端与所述动力臂固定连接,所述第一驱动主体用于通过所述第一动力轴带动所述动力臂相对于所述第一防护罩绕所述第一驱动件的轴向转动。
14.在其中一个实施例中,所述动力臂设置于所述第一防护罩外,所述第一动力轴收容于所述第一防护罩内,所述第一驱动件还包括第一减速器,所述第一减速器的一端与所述动力臂连接,所述第一减速器的另一端伸入至所述第一防护罩内并与所述第一动力轴远
离所述第一驱动主体的一端连接。
15.在其中一个实施例中,所述安装座套设于所述第二防护罩内,所述第二驱动件包括第二驱动主体和第二动力轴,所述第二驱动主体设置于所述第二防护罩内,所述第二动力轴的一端与所述第二驱动主体连接,所述第二动力轴的另一端伸入至所述安装座内并与所述安装座固定连接,所述第二驱动主体用于通过所述第二动力轴带动所述安装座相对于所述第二防护罩绕所述第二驱动件的轴向转动。
16.在其中一个实施例中,所述工业机器人还包括用于供线缆走线以保护线缆的走线管,所述走线管的一端与所述防护罩连接,所述走线管的另一端与所述动力臂转动连接。
17.在其中一个实施例中,所述工业机器人还包括第三密封件和第四密封件,所述第三密封件设置于所述走线管与所述防护罩的连接处,所述第四密封件设置于所述走线管与所述动力臂的连接处。
18.在其中一个实施例中,所述工业机器人还包括用于连接所述第一驱动件和/或所述第二驱动件的线缆,所述线缆设置于所述防护罩内。
19.本技术提供的工业机器人,第一驱动件能够驱动动力臂绕第一驱动件的轴向转动,第二驱动件能够驱动安装座绕与第一驱动件的轴向垂直的第二驱动件的轴向转动,从而确保动力臂和安装座自由旋转功能的实现,此外通过将第一驱动件和第二驱动件设置于防护罩内,从而确保了工业机器人的核心零部件第一驱动件和第二驱动件与外界工作环境相对隔离,提高了工业机器人的防护等级,保障工业机器人在恶劣应用场景下的使用寿命,拓展了工业机器人的应用场景范围。
附图说明
20.图1为一实施例中的工业机器人的结构示意图;
21.图2为图1所示的工业机器人的局部剖视图;
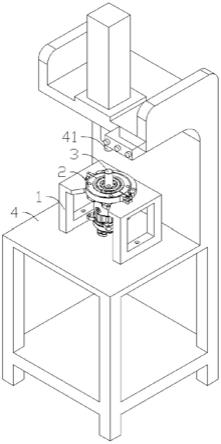
22.图3为图1所示的工业机器人的局部结构示意图。
具体实施方式
23.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容的理解更加透彻全面。
24.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。
26.如图1及图2所示,本技术提供了一种工业机器人,该工业机器人包括第一驱动件100、动力臂200、第二驱动件300、安装座400以及防护罩500,动力臂200与第一驱动件100连接,第一驱动件100用于驱动动力臂200绕第一驱动件100的轴向转动;安装座400与第二驱
动件300连接,第二驱动件300用于驱动安装座400绕第二驱动件300的轴向转动,第二驱动件300的轴向与第一驱动件100的轴向垂直;第一驱动件100和第二驱动件300均设置于防护罩500内。
27.本技术提供的工业机器人,第一驱动件100能够驱动动力臂200绕第一驱动件100的轴向转动,第二驱动件300能够驱动安装座400绕与第一驱动件100的轴向垂直的第二驱动件300的轴向转动,从而确保动力臂200和安装座400自由旋转功能的实现,此外通过将第一驱动件100和第二驱动件300设置于防护罩500内,从而确保了工业机器人的核心零部件第一驱动件100和第二驱动件300与外界工作环境相对隔离,提高了工业机器人的防护等级,保障工业机器人在恶劣应用场景下的使用寿命,拓展了工业机器人的应用场景范围。
28.如图1所示,防护罩500包括相连接的第一防护罩510和第二防护罩520,第一驱动件100设置于第一防护罩510内,第二驱动件300设置于第二防护罩520内。
29.进一步地,第一防护罩510包括第一子防护罩512、第二子防护罩514以及连接第一子防护罩512和第二子防护罩514的第一紧固件516,第一驱动件100设置于第一子防护罩512和第二子防护罩514围合形成的空腔内,第二防护罩520与第一子防护罩512连接,第一防护罩510还包括第一密封件,第一密封件设置于第一子防护罩512和第二子防护罩514的连接处,以提升第一子防护罩512和第二子防护罩514的连接处的密封效果。
30.具体地,第一紧固件516可以为螺纹紧固件,第一紧固件516穿过第一密封件以将第一密封件固定于第一子防护罩512和第二子防护罩514之间。
31.第二防护罩520包括第三子防护罩522、第四子防护罩524以及连接第三子防护罩522和第四子防护罩524的第二紧固件526,第二驱动件300设置于第三子防护罩522和第四子防护罩524围合形成的空腔内,第一防护罩510与第三子防护罩522连接,第二防护罩520还包括第二密封件,第二密封件设置于第三子防护罩522和第四子防护罩524的连接处,以提升第三子防护罩522和第四子防护罩524的连接处的密封效果。
32.具体地,第二紧固件526可以为螺纹紧固件,第二紧固件526穿过第二密封件以将第二密封件固定于第三子防护罩522和第四子防护罩524之间。
33.如图2所示,第一驱动件100为伺服电机,第一驱动件100包括第一驱动主体110和第一动力轴120,第一驱动主体110设置于第一防护罩510内,第一动力轴120的一端与第一驱动主体110连接,第一动力轴120的另一端与动力臂200固定连接,第一驱动主体110用于通过第一动力轴120带动动力臂200相对于第一防护罩510绕第一驱动件100的轴向转动。
34.动力臂200设置于第一防护罩510外,第一动力轴120收容于第一防护罩510内,为了提高第一驱动件100的输出力矩,第一驱动件100还包括第一减速器130,第一减速器130的一端与动力臂200连接,第一减速器130的另一端伸入至第一防护罩510内并与第一动力轴120远离第一驱动主体110的一端连接。
35.如图1及图3所示,安装座400套设于第二防护罩520内,第二驱动件300为伺服电机,第二驱动件300包括第二驱动主体310和第二动力轴,第二驱动主体310设置于第二防护罩520内,第二动力轴的一端与第二驱动主体310连接,第二动力轴的另一端伸入至安装座400内并与安装座400固定连接,第二驱动主体310用于通过第二动力轴带动安装座400相对于第二防护罩520绕第二驱动件300的轴向转动。
36.为了提高第二驱动件300的输出力矩,第二驱动件300还包括第二减速器330,第二
减速器330固定设置于安装座400内并与第二动力轴远离第二驱动主体310的一端连接。
37.如图2所示,工业机器人还包括油封结构350,油封结构350设置于第二防护罩520和安装座400之间,以提高第二防护罩520和安装座400之间的密封效果。
38.工业机器人还包括用于供线缆900走线以保护线缆900的走线管600,走线管600的一端与防护罩500连接,具体地,走线管600的一端与第二防护罩520连接,走线管600的另一端与动力臂200转动连接。
39.工业机器人还包括第三密封件700和第四密封件800,第三密封件700设置于走线管600与防护罩500的连接处,以提升走线管600与防护罩500的连接处的密封效果,具体地,第三密封件700设置于走线管600与第二防护罩520的连接处,以提升走线管600与第二防护罩520的连接处的密封效果,第四密封件800设置于走线管600与动力臂200的连接处,以提升走线管600与动力臂200的连接处的密封效果。
40.工业机器人还包括用于连接第一驱动件100和/或第二驱动件300的线缆900,线缆900设置于防护罩500内。具体地,线缆900设置在防护罩500、安装座400、动力臂200以及走线管600内,通过将线缆900设置于防护罩500、安装座400、动力臂200以及走线管600内,从而确保了线缆900与外界工作环境相对隔离,提高了工业机器人的防护等级。
41.如图2及图3所示,具体在本实施例中,线缆900包括第一线缆910、第二线缆920及第三线缆930,第一线缆910设置在第一防护罩510内,并与第一驱动件100连接,第二线缆920设置在第二防护罩520内,并与第二驱动件300连接,第三线缆930的一端收容在第二防护罩520和安装座400内,并盘绕在第二驱动件300上,第三线缆930的另一端穿过第二防护罩520并经走线管600延伸至动力臂200内。
42.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
43.以上实施例仅表达了本实用新型的优选的实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。