1.本发明涉及机械手技术领域,具体为一种夹持稳定的转运机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累,机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力,工业机械手机器人的一个重要分支。
3.在现有的加工用机械手中,大多通过机械夹持的方式,对物体进行固定,再进行转运,但是这样的方式在夹取某些较为光滑的物体时不便于夹稳,同时在夹持较为脆弱的物体时,容易造成损坏,所以需要对现有的结构进行改进。
技术实现要素:
4.本发明的目的在于提供一种夹持稳定的转运机械手,以解决上述背景技术中提出的现有的加工用机械手中,大多通过机械夹持的方式,对物体进行固定,再进行转运,但是这样的方式在夹取某些较为光滑的物体时不便于夹稳,同时在夹持较为脆弱的物体时,容易造成损坏的问题。
5.为实现上述目的,本发明提供如下技术方案:一种夹持稳定的转运机械手,包括:
6.基座,所述基座的顶部设有伸缩气缸,所述升降连接块设置在伸缩气缸的顶部输出轴上,所述升降连接块的左侧转动连接有第一转动节,且第一转动节的左侧转动连接有第二转动节,所述第二转动节的左侧通过第三转动节连接有驱动部;
7.夹持夹具,所述夹持夹具设置在驱动部的左侧,所述夹持夹具的左端转动安装有活动关节,且夹持夹具的内部通过弹簧与活动关节连接,所述夹持夹具的内部安装有充气囊,所述夹持夹具的右端插入驱动部内,且夹持夹具的右端设有啮合齿,所述夹持夹具的内侧设有防滑凸起。
8.作为本发明进一步的方案:所述基座的内部安装有第一电机,所述第一电机的输出轴通过两个连接转齿的相互啮合带动转轴的转动。
9.通过采用上述技术方案,方便实现基座以上的部分整体的旋转,便于实现物体的转运。
10.作为本发明进一步的方案:所述伸缩气缸的底部设有支撑板,且支撑板的底部设有一圈滚珠,所述滚珠与基座的顶部接触,所述伸缩气缸的底部与转轴的顶部固定连接。
11.通过采用上述技术方案,利用滚珠提高伸缩气缸底部的转动效率。
12.作为本发明进一步的方案:所述第一转动节包括第一驱动节、第一连接轴以及第
一连接块,所述第一驱动节与升降连接块左侧固定连接,且第一驱动节的左侧通过第一连接轴与第一连接块转动连接,所述第一驱动节的内部设有微型驱动电机,且微型驱动电机的输出轴与第一连接轴连接。
13.通过采用上述技术方案,提高整体机械臂的灵活程度。
14.作为本发明进一步的方案:所述第二转动节包括第二驱动节、第二连接轴以及第二连接块,所述第二驱动节通过连接件与第一转动节左侧固定连接,且第二驱动节的左侧通过第二连接轴与第二连接块转动连接,所述第二驱动节的内部设有微型驱动电机,且微型驱动电机的输出轴与第二连接轴连接。
15.通过采用上述技术方案,进一步提升可活动关节数,使得端部的夹持夹具可以在更大的范围内移动。
16.作为本发明进一步的方案:所述第三转动节的内部安装有第二电机,且第二电机的输出轴与驱动部连接。
17.通过采用上述技术方案,方便通过第二电机带动驱动部和夹持头的旋转。
18.作为本发明进一步的方案:所述驱动部包括第三电机、传动带和摄像头,所述驱动部的内部安装有第三电机,所述第三电机通过传动带与啮合齿连接,所述驱动部的左侧内嵌安装有摄像头。
19.通过采用上述技术方案,方便利用第三电机带动夹持夹具的收缩与展开,同时摄像头的设计,使得夹持夹具可以主动定位被夹持的物体位置。
20.作为本发明进一步的方案:所述充气囊通过进气管与外部气源连接,且充气囊为橡胶材质,同时充气囊的表面粗糙。
21.通过采用上述技术方案,方便通过充气囊的膨胀来夹持较为易损的物体。
22.作为本发明进一步的方案:所述夹持夹具的左侧设置有挡块,所述活动关节的右侧设置有卡块。
23.通过采用上述技术方案,方便对活动关节的位置进行限制。
24.与现有技术相比,本发明的有益效果是:该夹持稳定的转运机械手,
25.设置有活动关节、防滑凸起、弹簧、挡块和卡块,活动关节利用弹簧带动向内收卷,通过挡块和卡块的相互抵住实现对活动关节的位置的限制,这样的结构实现夹持夹具的开口封闭,提高装置对光滑物体的夹持效果,同时夹持夹具内的防滑凸起的设计可以进一步提高夹持稳定性;
26.另外,在夹持较为脆弱的物体时,第三电机不启动,避免夹持夹具的闭合,利用气源向充气囊充气,充气囊内气体增加后,充气囊向内侧膨胀,对夹持夹具内的物体实现柔性的夹持效果,避免对被夹持物体造成破坏。
附图说明
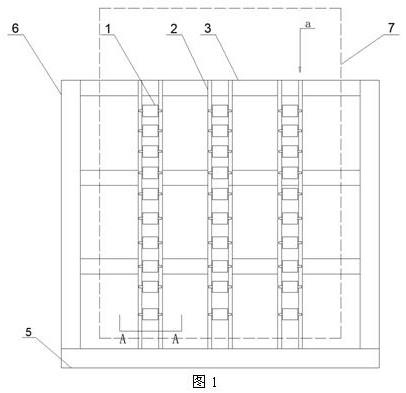
27.图1为本发明正视结构示意图;
28.图2为本发明基座剖视结构示意图;
29.图3为本发明俯视结构示意图;
30.图4为本发明驱动部和夹持夹具俯视剖视结构示意图。
31.图中:1、基座,101、第一电机,102、连接转齿,103、转轴,2、伸缩气缸,201、支撑板,
202、滚珠,3、升降连接块,4、第一转动节,401、第一驱动节,402、第一连接轴,403、第一连接块,5、第二转动节,501、第二驱动节,502、第二连接轴,503、第二连接块,6、第三转动节,601、第二电机,7、驱动部,701、第三电机,702、传动带,703、摄像头,8、夹持夹具,801、活动关节,802、啮合齿,803、充气囊,804、进气管,805、防滑凸起,806、弹簧,807、挡块,808、卡块,9、连接件。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
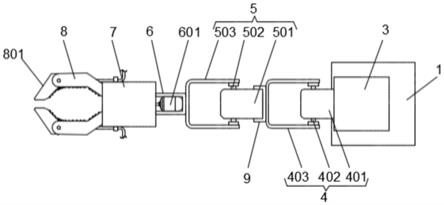
33.请参阅图1,本发明提供一种技术方案:一种夹持稳定的转运机械手,包括
34.基座1,所述基座1的顶部设有伸缩气缸2,所述升降连接块3设置在伸缩气缸2的顶部输出轴上,所述升降连接块3的左侧转动连接有第一转动节4,且第一转动节4的左侧转动连接有第二转动节5,所述第二转动节5的左侧通过第三转动节6连接有驱动部7;
35.夹持夹具8,所述夹持夹具8设置在驱动部7的左侧,所述夹持夹具8的左端转动安装有活动关节801,且夹持夹具8的内部通过弹簧806与活动关节801连接,所述夹持夹具8的内部安装有充气囊803,所述夹持夹具8的右端插入驱动部7内,且夹持夹具8的右端设有啮合齿802,所述夹持夹具8的内侧设有防滑凸起805;
36.在使用该夹持稳定的转运机械手时,基座1内的结构带动整体的旋转,伸缩气缸2的设计实现顶部升降连接块3以及左侧的结构的升降效果,第一转动节4和第二转动节5实现调整夹持夹具8角度以及位置的效果,驱动部带动夹持夹具8的开合,活动关节801在弹簧806的作用下将夹持夹具8的端部完全闭合,提高夹持效果,同时防滑凸起805进一步增大摩擦,提高夹持稳定性。
37.请参阅图2,在本发明的一个实施例中,所述基座1的内部安装有第一电机101,所述第一电机101的输出轴通过两个连接转齿102的相互啮合带动转轴103的转动;
38.在本发明实施例中,基座1内的第一电机101通过两个连接转齿102实现带动转轴103的旋转,进而通过103带动顶部的升降气缸2的旋转,方便调整该夹持稳定的转运机械手的角度,同时第一电机101可以反向转动带动顶部结构的返回,减少机械手运行时资源的消耗以及空间的占用。
39.请参阅图2,在本发明的一个实施例中,所述伸缩气缸2的底部设有支撑板201,且支撑板201的底部设有一圈滚珠202,所述滚珠202与基座1的顶部接触,所述伸缩气缸2的底部与转轴103的顶部固定连接;
40.在本发明实施例中,伸缩气缸2在第一电机101的带动下旋转时,伸缩气缸2底部的支撑板201起到对伸缩气缸2的支撑效果,避免伸缩气缸2陷入基座1内,同时滚珠202降低了支撑板201的摩擦因数,使得伸缩气缸2的转动更加便捷。
41.请参阅图3,在本发明的一个实施例中,所述第一转动节4包括第一驱动节401、第一连接轴402以及第一连接块403,所述第一驱动节401与升降连接块3左侧固定连接,且第一驱动节401的左侧通过第一连接轴402与第一连接块403转动连接,所述第一驱动节401的
内部设有微型驱动电机,且微型驱动电机的输出轴与第一连接轴402连接,所述第二转动节5包括第二驱动节501、第二连接轴502以及第二连接块503,所述第二驱动节501通过连接件9与第一转动节4左侧固定连接,且第二驱动节501的左侧通过第二连接轴502与第二连接块503转动连接,所述第二驱动节501的内部设有微型驱动电机,且微型驱动电机的输出轴与第二连接轴502连接;
42.在本发明实施例中,第一转动节4和第二转动节5均起到提高该夹持稳定的转运机械手夹取范围的效果,并且提高了机械手的灵活程度。
43.请参阅图3,在本发明的一个实施例中,所述第三转动节6的内部安装有第二电机601,且第二电机601的输出轴与驱动部7连接;
44.在本发明实施例中,第二电机601带动驱动部7的旋转,进而带动夹持夹具8的旋转,方便夹持夹具8对被夹持的物体进行翻转等操作,增加了装置的用途。
45.请参阅图4,在本发明的一个实施例中,所述驱动部7包括第三电机701、传动带702和摄像头703,所述驱动部7的内部安装有第三电机701,所述第三电机701通过传动带702与啮合齿802连接,所述驱动部7的左侧内嵌安装有摄像头703;
46.在本发明实施例中,第三电机701通过传动带702与啮合齿802的配合,带动两侧夹持夹具8的闭合与开启,同时摄像头703的设计使得装置可以自主定位被夹持物体的位置,提高实用性。
47.请参阅图4,在本发明的一个实施例中,所述充气囊803通过进气管804与外部气源连接,且充气囊803为橡胶材质,同时充气囊803的表面粗糙,所述夹持夹具8的左侧设置有挡块807,所述活动关节801的右侧设置有卡块808;
48.在本发明实施例中,夹取脆弱物体时,进气管804向充气囊803充气,使得充气囊803膨胀,进而通过充气囊803将夹持夹具8内的结构顶住,实现对脆弱物体的保护性夹持效果,同时挡块807和卡块808的设计对弹簧806收缩活动关节801进行一个限制,避免活动关节801完全收入夹持夹具8内。
49.工作原理:在使用该夹持稳定的转运机械手时,基座1内第一电机101通过连接转齿102和转轴103带动伸缩气缸2的旋转,伸缩气缸2带动升降连接块3升降,再通过第一转动节4和第二转动节5内的微型驱动电机带动驱动部7和夹持夹具8的倾斜,使得夹持夹具8的左端朝下,摄像头703检测到被夹持物体位置后,通过机械手内的各驱动结构配合带动两个夹持夹具8将物体夹持,第三电机701通过传动带702和啮合齿802带动夹持夹具8的闭合,活动关节801利用弹簧806对夹持夹具8开口一侧进行限制,防滑凸起805避免夹持时产生晃动,在夹持脆弱物体时,夹持夹具8不闭合,利用进气管804向充气囊803充气使得充气囊803膨胀后完成夹持的效果,最后通过驱动结构带动物体的转运,本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
50.术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明的简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
51.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等
同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。