一种igv自动化小车远程故障处理系统
技术领域
1.本发明涉及自动化水平运输系统远程控制技术领域,更具体地,涉及一种igv自动化小车远程故障处理系统。
背景技术:
2.自动化水平运输系统中的igv自动化无人小车长期运行在封闭无人区域,其发生单机定位及导航故障后,目前是由工作人员前往现场利用基于无线通信4g技术的遥控设备对igv自动化无人小车进行摆正或者驶离工作区域进行故障处理,现有的定位故障排查流程如下:故障开始-》技术部门通知业务部门故障排除场地需求-》业务部门进行相关路径及任务封闭区域设置-》技术部门进行现场设备位置修正或人工拖离业务车道-》技术部门现场人员撤离现场-》业务部门恢复相关任务及区域封闭测试-》故障解除大约需要30-40分钟,其故障处理流程比较复杂,而且配合的业务部门较多,涉及技术部门人员进入场地,提高了人员的入场风险,导致大范围的自动化区域无法自动化作业,此外,定位故障排查采用的遥控设备是基于无线通信4g技术,只能作为传输自动化小车阶段性运行指令及设备运行,无线通信4g技术的延时性和上行带宽不能满足对igv自动化小车远程故障处理远程实时控制。
技术实现要素:
3.本发明的目的在于提供一种igv自动化小车远程故障处理系统,采用基于无线通信5g技术的远控台对igv自动化小车进行监控和远程控制,节约定位故障排查的时间,减少了需要配合的业务部门,降低人员入场风险。
4.为了实现上述目的,本发明采用以下技术方案:
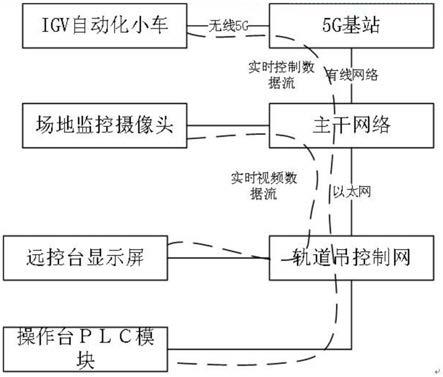
5.一种igv自动化小车远程故障处理系统,包括远控台、igv自动化小车、5g基站以及路端监控摄像头,远控台包括远控台显示屏和操作台模块,5g基站和igv自动化小车采用5g无线通讯连接,所述远控台显示屏分别与所述5g基站、所述路端监控摄像头采用有线网络通讯连接,从igv自动化小车与路端监控摄像头获取到现场设备所在地的视频情况,所述操作台plc模块通过有线网络与所述5g基站连接,通过操纵所述操作台模块对igv自动化小车进行实时远程控制。
6.优选的,igv自动化小车上设有天线、车载镜和中央控制器,所述天线与所述5g基站通过5g有线连接,所述中央控制器内设有发射模块,所述发射模块通过所述中央控制器将所述车载镜的远程锁视频数据传输至所述天线,所述天线通过所述发射模块将远程视频数据和远程控制数据无线传输给5g基站。
7.优选的,所述有线网络包括位于设备网络主机内的主干网络和位于办公网主机内的轨道吊控制网,所述主干网络和所述轨道吊控制网通过以太网连接,所述主干网络分别与所述5g基站、所述路端监控摄像头有线通讯连接,所述轨道吊控制网分别与所述操作台模块、所述远控台显示屏有线通讯连接。
8.优选的,所述远控台显示屏包括路测显示模块、车载镜显示模块和igv自动化小车状态显示模块,所述路测显示模块通过所述主干网络和所述轨道吊控制网与所述路端监控摄像头进行网络通讯连接,所述车载镜显示模块和所述igv自动化小车状态显示模块通过所述主干网络和所述轨道吊控制网与所述igv自动化小车状态显示模块进行网络通讯连接。
9.优选的,所述操作台模块包括控制面板,设置在控制面板内的语音模块,设置在控制面板内的模块以及与控制面板电性连接的轨道吊操作手柄,所述轨道吊操作手柄、所述语音模块分别与所述模块电性连接。
10.优选的,所述轨道吊操作手柄包括控制车辆前后移动的左侧轨道吊手柄,控制车轮左右移动的右侧轨道吊手柄以及控制车辆制动的车轮滚动使能按钮。
11.采用上述技术方案,本发明具有以下优点:
12.本发明提供一种igv自动化小车远程故障处理系统,远控台基于5g通信技术从igv自动化小车与陆侧监控摄像头获取到igv自动化小车现场设备所在地的视频情况,通过远控台显示屏能够直观看到igv自动化小车实时状况,通过操作台模块对igv自动化小车进行实时远程控制和故障处理,该igv自动化小车远程故障处理系统智能化程度比较高,实用性能比较强,能够实现对igv自动化小车远程实时控制,节约了igv自动化小车远程故障处理时间,减少需要配合的业务部门,降低人员入场风险。
附图说明
13.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显。
14.图1是本发明的igv自动化小车远程故障处理系统的结构图;
15.图2是本发明的远控台的结构图;
16.图3是本发明igv自动化小车远程故障处理系统的通讯连接图;
17.图4是本发明操纵左侧轨道吊手柄时igv自动化小车的状态图;
18.图5是本发明操纵右侧轨道吊手柄时igv自动化小车的状态图;
19.图6是本发明操纵车轮滚动使能按钮时igv自动化小车的状态图。
具体实施方式
20.以下结合说明书附图对本发明的技术方案进行具体说明,在具体实施方式中详细叙述本发明的详细特征以及优点,其内容足以使任何本领域技术人员了解本发明的技术内容并据以实施,且根据本说明书所揭露的说明书、权利要求及附图,本领域技术人员可轻易地理解本发明相关的目的及优点。
21.图1示出了igv自动化小车远程故障处理系统的结构图;图2示出了远控台的结构图;图3示出了igv自动化小车远程故障处理系统的通讯连接关系图。
22.一种igv自动化小车远程故障处理系统具体如图1、图2、图3所示,包括远控台1、igv自动化小车2、5g基站3以及路端监控摄像头4。远控台1包括远控台显示屏和操作台(操作台可采用plc模块),远控台显示屏与操作台plc模块通过隔板8进行隔开,5g基站3和igv自动化小车2采用5g网络进行无线通讯连接,远控台显示屏分别与5g基站3、路端监控摄像
头4通过有线网络通讯连接,从igv自动化小车2与路端监控摄像头4获取到现场设备所在地的视频情况,操作台plc模块通过有线网络与5g基站3进行通讯连接,通过操纵操作台plc模块对igv自动化小车2进行实时远程控制。
23.其中:igv自动化小车2上设有天线5和车载镜6,igv自动化小车2内部设有中央控制器,中央控制器为igv自动化小车内部的一个常规的控制芯片,控制芯片上设有发射模块,igv自动化小车2的天线5和5g基站3通过5g网络进行无线连接,远控台1与5g基站3通过有线网络进行有线连接,车载镜6对igv自动化小车2实时状态进行视频监控,igv自动化小车2的远程视频数据信号通过天线5,然后反馈给中央控制器,经信号处理后通过发射模块发送给5g基站3,5g基站3将接受到的远程视频数据信号通过有线网络传输给远控台1,远控台1根据反馈的远程视频数据信号,发送远程控制数据信号给中央控制器对igv自动化小车2进行远程控制。
24.有线网络包括位于设备网络主机13内的主干网络和位于办公网主机14内的轨道吊控制网,主干网络和轨道吊控制网两者通过以太网进行连接,主干网络分别与5g基站、路端监控摄像头4进行有线通讯连接,轨道吊控制网分别与操作台plc模块、远控台显示屏进行有线通讯连接。
25.路端监控摄像头4安装在封闭无人区域内,安装在地面上固定的竖杆的上端,路端监控摄像头4包括多个方向的摄像头,对igv自动化小车2的运动轨迹进行全方位无死角的实时监控,路端监控摄像头4通过主干网络和轨道吊控制网与远控台显示屏进行有线网络连接,路端监控摄像头4将监控的igv自动化小车2的运动轨迹视频数据通过主干网络和轨道吊控制网传输给远控台显示屏,获取到现场设备所在地的视频情况。
26.远控台显示屏包括路测显示模块10、车载镜显示模块11和igv自动化小车状态显示模块12,路测显示模块10通过主干网络和轨道吊控制网与路端监控摄像头4进行网络通讯连接,能够从不同的角度对igv自动化小车2的运动轨迹视频进行监测,获取到现场设备所在地的视频情况。车载镜显示模块11和igv自动化小车状态显示模块12通过主干网络和轨道吊控制网与igv自动化小车状态显示模块12进行网络通讯连接,用于实时监测igv自动化小车2的实时状态。
27.在一个具体的实施例中,路测显示模块10的数目为2个,能够从不同的角度对igv自动化小车2的运动轨迹视频进行监测,车载镜显示模块11能够监视igv自动化小车的实时导航进行监测,igv自动化小车2状态显示模块12能够实时监测igv自动化小车2的实时状态,例如:是否出现故障,是否出现异常等。
28.操作台plc模块包括控制面板8,设置在控制面板内的语音模块9,设置在控制面板8内的plc模块以及与控制面板8电性连接的轨道吊操作手柄7,轨道吊操作手柄7、语音模块9分别与plc模块电性连接。其中,语音模块9能够通过plc模块以智能语音方式对igv自动化小车2进行远程控制,通过将人的语言通过plc模块处理后转化为igv自动化小车2的操作指令控制igv自动化小车2运动,操纵轨道吊操作手柄7通过plc模块对igv自动化小车2进行远程实时控制。
29.图4是本发明操纵左侧轨道吊手柄时igv自动化小车的状态图;图5是本发明操纵右侧轨道吊手柄时igv自动化小车的状态图;图6是本发明操纵车轮滚动使能按钮时igv自动化小车的状态图。轨道吊操作手柄7包括控制车辆前后移动的左侧轨道吊手柄71,控制车
轮左右移动的右侧轨道吊手柄72以及控制车辆制动的车轮滚动使能按钮73。左侧轨道吊手柄71向上按动时,控制igv自动化小车向前给定,左侧轨道吊手柄71向下按动时,控制igv自动化小车向后给定具体如图4所示,右侧轨道吊手柄72向左按动时,控制igv自动化小车的车轮向左移动,右侧轨道吊手柄72向右按动时,控制igv自动化小车的车轮向右移动具体如图5所示,车轮滚动使能按钮73按下时,车辆开始行驶,车轮滚动使能按钮73弹出时,车辆紧急制动。通过操控轨道吊操作手柄7对igv自动化小车2进行实时远程控制具体如图6所示。
30.igv自动化小车远程故障处理系统通过基于5g技术的远控台进行远程控制的排查流程如下:故障开始-》技术部门设置任务封闭区域-》技术部门进行远程操作修正位置或驶离至非作业区域-》故障解除约3-10分钟,与现有技术中基于无线通信技术4g技术对设备进行摆正或者驶离工作区域进行故障处理流程需要30-40分钟相比,远程故障处理流程节约20-30分钟的时间,而且减少需要配合的业务部门,降低人员入场风险,在延时性和上行带宽能力上都相对原有4g技术有很大的提升,使得igv自动化小车远程实时控制得到很大的提升。
31.最后,需要指出的是,虽然本发明已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,在不脱离本发明构思的前提下还可以作出各种等效的变化或替换,因此,只要在本发明的实质精神范围内对上述实施例的变化、变型都将落在本发明的权利要求书范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。