1.本发明属于移动机器人技术领域,具体涉及一种移动机器人全局路径规划方法。
背景技术:
2.近年来,随着定位、感知等关键技术的突破,以无人配送车和自动导引车agv为代表的智能移动机器人在自动驾驶和无人物流等领域得到快速应用,逐渐改善着人们的生产和生活。
3.路径规划是实现机器人自主移动能力的关键技术。目前的全局路径规划技术在同时处理机器人自身运动学和环境障碍物等复杂约束时仍然存在搜索速度慢、路径质量低等问题,给移动机器人的大规模应用造成了阻碍。
技术实现要素:
4.本发明针对现有移动机器人全局路径规划方法效率低下的问题,提出一种移动机器人全局路径规划方法,通过重复利用记忆路径,能够减少重复计算,从而大幅提高规划效率。
5.本发明实施例可以应用于包括自动驾驶车辆、自动导引车agv和服务机器人的智能移动机器人。
6.本发明提出的技术方案包含以下步骤:
7.一种移动机器人全局路径规划方法,所述规划方法包括以下步骤:
8.步骤1,根据起始点和目标点,以及障碍物分布,规划出移动机器人的完整可行路径;
9.步骤2,从所述可行路径中,去除与起始点和目标点之间距离小于设定长度d0的点,形成一段包含新的起点和新的终点的骨干路径,以所述骨干路径的起点和终点作为索引存储在数据库中;
10.步骤3,再次规划时根据新任务的起始点和目标点检索数据库,提取对应的骨干路径;
11.步骤4,使用局部路径规划方法将新的起始点和目标点连接到骨干路径,得到最终的可行路径。
12.进一步的,所述设定长度d0根据移动机器人的最小转向半径确定具体为2r
min
《d0《4r
min
,r
min
是最小转向半径。
13.进一步的,所述步骤1中,采用混合a*算法规划出移动机器人的完整可行路径。
14.进一步的,所述骨干路径根据以下方式得到:
15.所述新任务起始点与骨干路径起点之间距离,与新任务目标点与骨干路径终点之间距离之和最小,该骨干路径为所述新任务对应的骨干路径。
16.作为本技术的一种优选实施方案,所述步骤3中,如果移动机器人为类车机器人,采用reeds-shepp曲线长度作为距离度量;
17.如果机器人为全向移动机器人,采用欧式距离度量。
18.作为本技术的一种优选实施方案,利用混合a*算法连接新任务的起始点和骨干路径的起点;利用混合a*算法连接骨干路径的终点和新任务的目标点;再将三段路径拼接为一段完整路径,作为满足避障和移动机器人运动约束的全局路径。
19.与现有技术相比,本发明的技术方案具有以下优点:
20.骨干路径是满足避障和运动约束的可行路径片段。利用记忆的骨干路径,机器人的搜索空间将显著缩小,agv的全局路径规划转化为机器人附近范围内的局部路径规划,通过重复利用记忆路径,能够减少重复计算,从而大幅提高规划效率。而且,环境面积越大,骨干路径的长度越长,效率提升越明显。在机器人作业点覆盖环境一定区域后,骨干路径将形成骨干路径网络,利用该网络能进一步减少重复规划计算量。因此该发明具有更大的改进空间。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1是移动机器人全局路径规划的一种工作场景示意图;
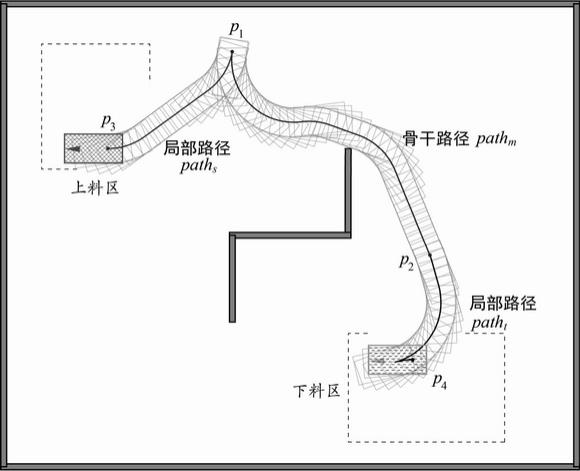
23.图2是从可行路径上提取得到的骨干路径示意图;
24.图3是采用本技术提供的移动机器人全局路径规划方法示意图。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚,下面将以室内叉车机器人自动搬运任务为例对本发明的技术方案进行详细的描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
26.机器人技术与仿生技术结合是机器人未来的发展趋势之一,经过千万年的进化,动物能够在复杂的自然环境中快速生成高质量的运动路径,通过借鉴动物高效的运动规划机理并与现有方法融合,能够显著提高机器人的路径规划效率。
27.根据对哺乳动物导航的神经基础——海马体的研究发现,动物在进行路径规划时能够将路径存储到记忆中,后续搜索路径时则会回忆其历史路径,即路径规划并非完全从零开始。受此思想启发,本发明提出一种基于记忆的机器人全局路径规划方法。
28.采用类车机器人模型对室内无人叉车进行运动学建模,类车机器人属于非完整约束系统,具有最小转向半径r
min
。
29.环境地图采用多边形几何表示,使用多边形表示叉车机器人最小包围盒的平面投影,如图1至图3所示,本技术中采用长方形作为包围盒的外部形态,机器人与环境的碰撞检测采用aabb axially aligned bounding box包围盒交叉检测算法。
30.图1为本发明实施例提供的一种工作场景,其中直线为障碍物,长方形为机器人包围盒,包围盒与障碍物不相交则表示无碰撞;在图示开始位姿和目标位姿之间,使用混合a*
算法规划得到了一条可行路径,即包围盒移动的中轴曲线。在路径上还画出了离散路径点上的机器人包围盒,即方形框。由于机器人具有运动学约束,采用混合a*路径规划算法作为骨干路径的构造算法。根据给定的起点和终点位姿坐标,调用混合a*算法生成避免与障碍物交叉,同时满足机器人运动约束的可行路径。
31.从可行路径上提取骨干路径。将距离起点d0距离内的可行路径点剔除,同样将距离终点d0距离内的可行路径点剔除。将剩余部分的可行路径点记为骨干路径pathm,新的骨干路径具有新的起点和终点。距离阈值d0的选择取决于机器人的最小转向半径r
min
,本实施例选择d0=2r
min
,将骨干路径上距离原始起点最近的点作为新的起点p1,将距离原始终点最近的点作为新的终点p2,参见图2。每个路径点是一个三维向量,包括机器人的xy位置和偏航角θ。
32.构造新的起点和终点对记为索引index=(p1,p2),将索引与骨干路径关联存储到数据库中,{index,pathm}。如果有新的搬运任务,从图3中的开始位姿3,记为p3,到终止位姿4,记为p4,则根据距离检索骨干路径的索引,查找距离最小的索引。新任务起始点与骨干路径起点之间距离加上新任务目标点与骨干路径终点之间的距离的和,以和最小作为距离最小,记为距离d。对于类车机器人,距离d的计算公式为d=reedsshepp(p1,p3) reedsshepp(p2,p4)。其中reedsshepp(s,t)函数表示位姿s与位姿t之间的reeds-shepp曲线长度,该长度是位姿(s、t)和最小转向半径r
min
的函数,对于全向移动机器人,定义d=l2(p1,p3) l2(p2,p4),其中l2函数表示l2范数,即各元素的平方和,然后开方,其中的mod是取模函数,其中p
x
,py是位姿p的xy位置坐标,p
θ
、q
θ
是p的姿态坐标;选择d最小的索引所对应的骨干路径。
33.利用reeds-shepp曲线或者混合a*算法构造p3到p1之间的局部路径(记为paths),用同样的方法构造p4到p2之间的局部路径(记为path
t
)。
34.将两段局部路径paths、path
t
与骨干路径pathm拼接为一条完整的路径path
join
=(paths,pathm,path
t
),该路径作为路径规划模块的结果直接输出给机器人的路径跟踪模块,参见图3。
35.骨干路径是满足避障和运动约束的可行路径片段。利用记忆的骨干路径,机器人的搜索空间将显著缩小,agv的全局路径规划转化为机器人附近范围内的局部路径规划,通过重复利用记忆路径,能够减少重复计算,从而大幅提高规划效率。而且,环境面积越大,骨干路径的长度越长,效率提升越明显。在机器人作业点覆盖环境一定区域后,骨干路径将形成骨干路径网络,利用该网络能进一步减少重复规划计算量。因此该发明具有更大的改进空间。
36.上述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和调整,这些改进和调整也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。