1.本发明涉及医疗器械加工技术领域,尤其是涉及一种输液管自动绕线机。
背景技术:
2.目前输液管的包装多为人工卷绕打包,部分较大的企业会采取半自动化的卷绕装袋方式,即便如此任然需要大量的工人进行间断性的作业,使得打包速度不能在根本上加快;基于这一问题,我们提供一种输液管自动绕线机。
技术实现要素:
3.本发明的目的在于提供一种输液管自动绕线机,提高绕线自动化程度与效率,减少人工参与。
4.为实现上述目的,本发明提供了如下技术方案:
5.一种输液管自动绕线机,包括机架,所述机架上设有绕线机构,所述机架顶部设有输送机构,所述输送机构包括输送架、第一导轨、第二导轨、第三导轨、第四导轨以及用于拨动输送输液管的拨料机构,所述第一导轨与第二导轨配合用于卡接输液管的进气头,所述第三导轨与第四导轨配合用于放置输液管的穿刺头座,所述输送机构靠近机架的一端设有用于将输液管推向绕线机构的按压机构,所述绕线机构包括伺服电机,所述伺服电机通过减速器连接有旋转盘,所述旋转盘内部中空且通过若干第一伸缩机构设有绕线板,所述绕线板上设有若干挡块以及弹性夹爪,所述旋转盘上开有供挡块以及弹性夹爪通过的通孔。
6.通过采用上述方案,当需要装置进行绕线时,首先,将输液管的穿刺头座放置在第三导轨与第四导轨上,输液管体卡在第三导轨与第四导轨之间,进气头卡入第一导轨与第二导轨之间,利用输液管的具体结构,将其放置稳定,放置简单且稳定;之后拨料机构将输液管沿着导轨拨动,从而朝向绕线机构移动,之后按压机构将输液管从导轨中脱出并按压向弹性夹爪,同时第一伸缩机构延展将绕线板上的挡块与弹性夹爪从旋转盘的通孔中突出,与按压机构相配合,完成对输液管的夹取;之后伺服电机通过减速器驱动旋转盘,挡块限制输液管的绕线位置,若干挡块组成环形,输液管缠绕在挡块外,使得缠绕的输液管变得整齐,方便之后的包装;之后,第一伸缩机构收缩将绕线板收回,从而将缠绕好的输液管从旋转盘上脱出,方便后续包装;本发明提高了绕线自动化程度与效率,减少人工参与。
7.优选的,所述拨料机构包括与输送架连接的拨料台,所述拨料台上旋转设有由电机驱动的拨料凸轮,所述拨料凸轮的数量至少为二,各所述拨料凸轮旋转设有同一拨动台,所述拨动台朝向输液管设有刷毛。
8.优选的,所述拨料机构数量为二且分别位于输送架两侧。
9.优选的,所述按压机构包括与输送架底部连接的按压座,所述按压座通过第三伸缩机构设有第一按压板,所述第一按压板通过第四伸缩机构设有第二按压板,所述第二按压板上设有供第一导轨穿过的开口。
10.优选的,所述按压座与第一导轨、第二导轨、第三导轨、第四导轨以及拨料机构固
定连接,所述按压座与输送架滑动连接,所述输送架上设有用于驱动按压座的第二伸缩机构。
11.优选的,所述输送机构还包括与第四导轨平行的第五导轨,所述第五导轨与第四导轨配合用于限制输液管的穿刺针座所在的竖向位置。
12.优选的,所述第一按压板通过第五伸缩机构设有第三按压板,所述第三按压板上设有供第四导轨以及第五导轨穿过的开口。
13.优选的,所述弹性夹爪数量为三且分别抓取输液管的穿刺头盖、进气头以及穿刺头座底部。
14.优选的,所述弹性夹爪包括固定架,所述固定架两侧铰接有相配合的夹板,两所述夹板底部通过弹簧相连接,所述夹板顶部开有斜坡形的渐进口,所述夹板中部开有容纳口。
15.本发明具有以下有益效果:
16.当需要装置进行绕线时,首先,将输液管的穿刺头座放置在第三导轨与第四导轨上,输液管体卡在第三导轨与第四导轨之间,进气头卡入第一导轨与第二导轨之间,利用输液管的具体结构,将其放置稳定,放置简单且稳定;之后拨料机构将输液管沿着导轨拨动,从而朝向绕线机构移动,之后按压机构将输液管从导轨中脱出并按压向弹性夹爪,同时第一伸缩机构延展将绕线板上的挡块与弹性夹爪从旋转盘的通孔中突出,与按压机构相配合,完成对输液管的夹取;之后伺服电机通过减速器驱动旋转盘,挡块限制输液管的绕线位置,若干挡块组成环形,输液管缠绕在挡块外,使得缠绕的输液管变得整齐,方便之后的包装;之后,第一伸缩机构收缩将绕线板收回,从而将缠绕好的输液管从旋转盘上脱出,方便后续包装;本发明提高了绕线自动化程度与效率,减少人工参与。
附图说明
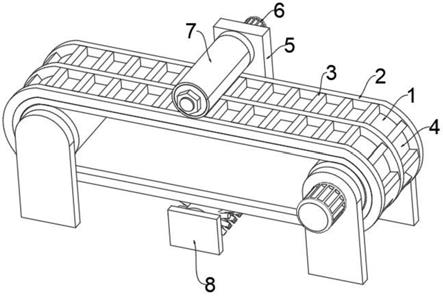
17.图1为本发明实施例的立体结构示意图;
18.图2为本发明实施例的输送机构结构示意图;
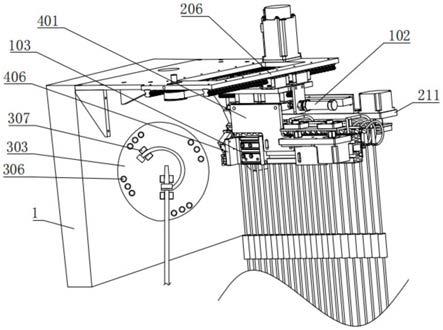
19.图3为本发明实施例的绕线机构结构示意图;
20.图4为本发明实施例的弹性夹爪结构示意图;
21.图5为本发明实施例的拨料机构结构示意图。
22.图中:1、机架;201、第一导轨;202、第二导轨;203、第三导轨;204、第四导轨;205、第五导轨;206、输送架;211、拨料台;212、拨料凸轮;213、拨动台;214、刷毛;301、伺服电机;302、减速器;303、旋转盘;304、第一伸缩机构;305、绕线板;306、挡块;307、弹性夹爪;311、固定架;312、夹板;313、渐进口;314、容纳口;401、按压座;402、第二伸缩机构;403、第三伸缩机构;404、第四伸缩机构;405、第五伸缩机构;406、第一按压板;407、第二按压板;408、第三按压板。
具体实施方式
23.下面结合附图和具体实施方式对本发明作进一步详细的说明。
24.一种输液管自动绕线机,如图1和图3所示,包括机架1,机架1上设有绕线机构,机架1顶部设有输送机构,输送机构包括输送架206、第一导轨201、第二导轨202、第三导轨203、第四导轨204以及用于拨动输送输液管的拨料机构,第一导轨201与第二导轨202配合
用于卡接输液管的进气头,第三导轨203与第四导轨204配合用于放置输液管的穿刺头座,输送机构靠近机架1的一端设有用于将输液管推向绕线机构的按压机构,绕线机构包括伺服电机301,伺服电机301通过减速器302连接有旋转盘303,旋转盘303内部中空且通过若干第一伸缩机构304设有绕线板305,绕线板305上设有若干挡块306以及弹性夹爪307,旋转盘303上开有供挡块306以及弹性夹爪307通过的通孔;
25.如图1和图3所示,当需要装置进行绕线时,首先,将输液管的穿刺头座放置在第三导轨203与第四导轨204上,输液管体卡在第三导轨203与第四导轨204之间,进气头卡入第一导轨201与第二导轨202之间,利用输液管的具体结构,将其放置稳定,放置简单且稳定;之后拨料机构将输液管沿着导轨拨动,从而朝向绕线机构移动,之后按压机构将输液管从导轨中脱出并按压向弹性夹爪307,同时第一伸缩机构304延展将绕线板305上的挡块306与弹性夹爪307从旋转盘303的通孔中突出,与按压机构相配合,完成对输液管的夹取;之后伺服电机301通过减速器302驱动旋转盘303,挡块306限制输液管的绕线位置,若干挡块306组成环形,输液管缠绕在挡块306外,使得缠绕的输液管变得整齐,方便之后的包装;之后,第一伸缩机构304收缩将绕线板305收回,从而将缠绕好的输液管从旋转盘303上脱出,方便后续包装;本发明提高了绕线自动化程度与效率,减少人工参与。
26.如图5所示,拨料机构包括与输送架206连接的拨料台211,拨料台211上旋转设有由电机驱动的拨料凸轮212,拨料凸轮212的数量至少为二,各拨料凸轮212旋转设有同一拨动台213,拨动台213朝向输液管设有刷毛214,电机驱动拨料凸轮212,使得拨动台213上的刷毛214对输液管的进行拨动送料,刷毛214具有一定的柔性,可降低输液管被扯坏的可能性,且不大幅影响拨动送料的效果。
27.如图1所示,拨料机构数量为二且分别位于输送架206两侧,提高拨动效率,从而提高绕线效率。
28.如图1-2所示,按压机构包括与输送架206底部连接的按压座401,按压座401通过第三伸缩机构403设有第一按压板406,第一按压板406通过第四伸缩机构404设有第二按压板407,第二按压板407上设有供第一导轨201穿过的开口;第四伸缩机构404延展将第二按压板407朝向第一导轨201移动,第一导轨201位于第二按压板407的开口内,第三伸缩机构403延展将第一按压板406以及第二按压板407朝向弹性夹爪307移动,完成对输液管的卡接。
29.如图1所示,按压座401与第一导轨201、第二导轨202、第三导轨203、第四导轨204以及拨料机构固定连接,按压座401与输送架206滑动连接,输送架206上设有用于驱动按压座401的第二伸缩机构402,第二伸缩机构402伸缩带动按压座401前后移动,从而为绕线机构与按压机构之间空出更大空间,方便绕线以及后续包装。
30.如图2所示,输送机构还包括与第四导轨204平行的第五导轨205,第五导轨205与第四导轨204配合用于限制输液管的穿刺头座所在的竖向位置,进一步限定输液管的位置,从而提高按压机构与绕线机构的工作精度与稳定性。
31.如图2所示,第一按压板406通过第五伸缩机构405设有第三按压板408,第三按压板408上设有供第四导轨204以及第五导轨205穿过的开口,设置第三按压板408,方便将输液管的穿刺头座从第三导轨203、第四导轨204以及第五导轨205之间脱出,并将其按压到弹性夹爪307内,提高按压的准确性。
32.如图1所示,弹性夹爪307数量为三且分别抓取输液管的穿刺头盖、进气头以及穿刺头座底部,提高弹性夹爪307夹持输液管的稳定性。
33.如图4所示,弹性夹爪307包括固定架311,固定架311两侧铰接有相配合的夹板312,两夹板312底部通过弹簧相连接,夹板312顶部开有斜坡形的渐进口313,夹板312中部开有容纳口314;输液管先通过渐进口313,之后进入容纳口314,夹持力由弹簧提供,且弹簧为弹性夹爪307提供复位功能,方便使用。
34.第一伸缩机构304、第二伸缩机构402、第三伸缩机构403、第四伸缩机构404以及第五伸缩机构405为常用伸缩装置(气缸、液压缸、液压杆、电缸等)中的一种,技术成熟,提高精度。
35.以上仅为本发明的具体实施例,但本发明的技术特征并不局限于此。任何以本发明为基础,为解决基本相同的技术问题,实现基本相同的技术效果,所作出的简单变化、等同替换或者修饰等,皆涵盖于本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。