使用盒子托盘组件动态处理物体的系统和方法
1.本技术是申请人伯克希尔格雷股份有限公司于2019年03月04日提交的国际申请号为pct/us2019/020530、题为“使用盒子托盘组件动态处理物体的系统和方法”的pct发明专利申请的分案申请。该pct发明专利申请于2020年9月3日进入中国国家阶段,其中国专利申请号为201980017008.x。
2.优先权
3.本技术要求2018年3月5日提交的美国临时申请第62/638,724号的优先权,该申请公开以参见的方式全部纳入本文。
背景技术:
4.本发明总体上涉及自动分拣和其他处理系统,并且在某些实施例中涉及可编程运动控制,例如,用于处理(例如分拣)诸如包裹、包装物、物品、货物等的物体的机器人系统。
5.例如,当前的配送中心分拣系统通常假定操作顺序不灵活,由此,工作人员首先将杂乱无章的输入物体流分离为单个隔离的物体流,通过识别物体的扫描仪将其以每次一个呈现给工作人员。然后,将物体装载到引导至分流机的一个或多个输送器上,一个或多个输送器然后将物体输送到期望的目的地,该目的地可以是盒子、斜槽、袋子或目的地输送器。
6.由于期望的目标是将进入的物体与分配的收集箱相匹配,因此这种系统具有固有的低效率以及灵活性。这种系统可能部分地需要大量的收集箱(因此需要大量的物理空间、大量的资本成本和大的操作成本),因为统一对所有物体进行分拣并非总是最有效的。
7.现有技术的分拣系统依靠人工。大多数解决方案都依赖于执行分拣的工作人员,方法是从归纳区域(斜槽、桌子等)扫描物体,然后将物体放置在暂存处所或收集箱中。当盒子满了或控制软件系统决定需要将其清空时,另一名工人将盒子清空到袋子、盒子或其他容器中,然后将该容器发送到下一个处理步骤。这样的系统在吞吐量(即,人类工人能够以这种方式分拣到该盒子有多快或者清空该盒子有多快)和分流的数量(即,对于给定的盒子尺寸,只能安排这么多盒子以在人类工人的有效触及内)方面受到限制。
8.在关键领域缺少部分自动化的装置来解决此问题。这种方法通常涉及倾斜托盘或炸弹架式再循环输送器。这些输送器具有能够装载有物体的离散的托盘。然后,托盘和物体穿过扫描通道,该通道对物体进行扫描并将其与其所搭载在其中的托盘关联;当托盘经过正确的盒子时,触发机构致使托盘将物体倒入盒子中。这种系统的缺点是每个分流器都需要致动器,这增加了机械复杂性,并且每个分流器的成本可能非常高。对于需要数百个分流器的应用,这种系统的巨大成本无法获得良好的投资回报。
9.一种替代方案是使用人工来增加系统中可用的分流器或收集箱的数量。这减少了系统安装成本,但增加了操作成本。手动分拣单元由一组工作人员配备,这避免了每次分流的巨大成本。然后,多个单元能够并行工作,从而有效地线性增加吞吐量,同时将昂贵的自动分流器数量保持在最低水平(等于并行分拣单元的数量,而不是所需的系统箱的总数)。这种方法涉及将用于分拣的物体供应到每个单元,这可以手动完成,但经由带有扫臂或其他无用分流器的输送器轻松完成,以到达每个工作单元。这种分流器不识别物体,也不能将
其分流到特定点位;相反,它们与光束中断器或其他简单的传感器一起工作,以确保将不加区分的物体束分流到每个单元。不复杂的分流器的较低成本以及分流器的小数量保持整个系统的分流器的低成本。
10.然而不幸的是,这些系统没有解决系统盒子总数的限制问题。该系统只是将总物体的相等份额分流至每个并行手动单元。因此,每个并行分拣单元必须具有所有相同的收集箱名称;否则,物体可能会递送到没有该物体映射到的盒子的单元中。仍然需要一种更高效和更具成本效益的物体分拣系统,该系统将物体处理(例如,分拣)到适当的收集箱中,但是在操作上更加有效。
技术实现要素:
11.根据一实施例,本发明提供了一种用于在物体处理系统中使用的盒子操纵系统。该盒子操纵系统包括盒子托盘,该盒子托盘包括用于接纳盒子的凹入区域,并且该凹入区域包括用于接纳容纳要处理的物体的盒子的多个底板和边缘部分。
12.根据另一个实施例,本发明提供了一种用于在物体处理系统中使用的盒子操纵系统,其中,该盒子操纵系统包括盒子托盘,该盒子托盘包括用于接纳盒子的凹入区域,该凹入区域包括用于接纳容纳要处理的物体的盒子的多个底板和边缘部分。盒子操纵系统还包括在盒子和盒子托盘中的至少一个上的识别标记,并且该识别标记唯一地识别盒子托盘操纵系统。
13.根据另一实施例,本发明提供了一种用于在物体处理系统中使用的盒子操纵系统,其中,该盒子操纵系统包括盒子托盘,该盒子托盘包括用于接纳盒子的凹入区域,该凹入区域包括用于接纳容纳要处理的物体的盒子的多个底板和边缘部分。该盒子托盘包括外部宽度和长度尺寸,该尺寸规定多个这样的盒子托盘在相邻对齐时提供了多个这样的盒子托盘的总宽度和总长度中的至少一个,使得多个这样的盒子托盘的总宽度或总长度中的至少一个提供了在盒子操纵系统内多个这样的盒子托盘中的每个的限定的位置。
14.根据又一实施例,本发明提供了一种用于在物体处理系统中使用的盒子操纵系统,其中,盒子操纵系统包括盒子托盘组件,该盒子托盘组件包括用于接纳盒子的托盘和盒子盖,该托盘包括用于接纳盒子的凹入区域,其中,凹入区域包括用于接纳盒子的多个底板和边缘部分,该盒子盖用于放置在打开的盒子上方,使得盒子的外部折板可以保持在打开位置,并且其中,盒子盖包括允许接近盒子的打开的顶部部分。
附图说明
15.参考附图可进一步理解以下的描述,附图中:
16.图1示出了根据本发明实施例的用于物体处理的盒子操纵系统的示意性等距视图;
17.图2示出了图1的盒子操纵系统的两个盒子托盘的示意性等距视图;
18.图3示出了图1的盒子操纵系统的多个盒子托盘的示意性平面图;
19.图4示出了使用图1的盒子操纵系统将同类物体处理成异类物体的示意平面图;
20.图5示出了使用图1的盒子操纵系统将异类物体处理成同类物体的示意平面图;
21.图6示出了图1的盒子操纵系统的盒子托盘组件、盒子和盒子盖的示意性分解图;
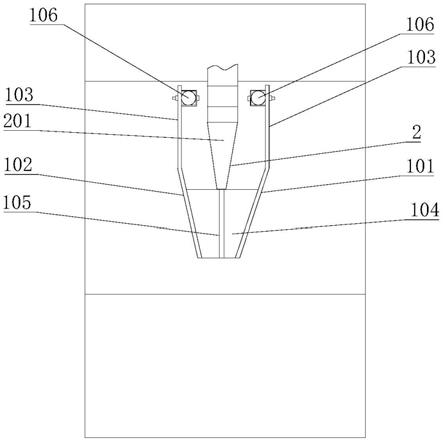
22.图7示出了图6的盒子托盘组件的示意性端视图;
23.图8示出了图6的盒子托盘组件的示意性侧视图;
24.图9a-9c示出了图6的盒子托盘组件(图9a)以及根据本发明的另外的实施例的盒子托盘组件(图9b和9c)的示意性等距视图;
25.图10a和10b示出了根据本发明的另外的实施例的盒子托盘组件的示意性等距视图,该盒子托盘组件涉及具有各种折板布置的盒子;
26.图11示出了图6的盒子和盒子托盘的说明性示意图,示出了当盒子定位在盒子托盘中时的空气排出;
27.图12示出了根据本发明的实施例的图6的盒子托盘的盒子托盘的示意性等距视图,示出了设置在凹入区域中的标记;
28.图13示出了图12的盒子托盘的示意性端视图;
29.图14示出了图12的盒子托盘的示意性侧视图;
30.图15示出了图12的盒子托盘的示意性俯视图;
31.图16示出了图12的盒子托盘的示意性仰视图;
32.图17示出了多个堆叠的盒子托盘的示意性等距视图;
33.图18示出了根据本发明的实施例的图6的盒子托盘的盒子盖的示意性等距视图,示出了设置在凹入区域中的标记;
34.图19示出了图18的盒子盖的示意性端视图;
35.图20示出了图18的盒子盖的示意性侧视图;
36.图21示出了图18的盒子盖的示意性俯视图;
37.图22示出了图18的盒子盖的示意性仰视图;
38.图23示出了多个堆叠的盒子盖的示意性等距视图;
39.图24a-24d示出了根据本发明的实施例的盒子托盘组件从一个输送器转移到另一个输送器的示意图。
40.图25a和25b示出了根据本发明的实施例的包括盒子盒子踢动器组件的盒子操纵系统的示意性等距视图;
41.图26a-图26d示出了根据本发明的另一实施例的包括盒子盒子踢动器组件的盒子操纵系统的示意性等距视图;
42.图27a和27b示出了根据本发明实施例的在包括用于将相邻的盒子托盘以侧对侧方式朝向彼此吸引的吸引系统的盒子操纵系统中的盒子托盘的示意性俯视图;以及
43.图28a和28b示出了根据本发明的另一实施例的在包括用于将相邻的盒子托盘以端至端方式朝向彼此吸引的吸引系统的盒子操纵系统中的盒子托盘的示意性俯视图。
44.示出的附图仅用于说明目的。
具体实施方式
45.根据各种实施例,本发明提供了一种用于在物体处理系统中使用的盒子操纵系统。盒子操纵系统包括盒子托盘,该盒子托盘包括用于接纳盒子的凹入区域。凹入区域包括多个底板和边缘部分,用于接纳容纳要处理的物体的盒子。根据另一个实施例,盒子操纵系统包括盒子托盘,该盒子托盘包括用于接纳盒子的凹入区域,并且该凹入区域包括用于接
纳容纳要处理的物体的盒子的多个底板和边缘部分。盒子操纵系统还包括在盒子托盘和盒子中的至少一个上的识别标记,并且该识别标记唯一地识别盒子托盘。根据另一个实施例,盒子托盘还包括外部宽度和长度尺寸,该尺寸规定多个这样的盒子托盘在相邻对齐时提供了多个这样的盒子托盘的总宽度和总长度中的至少一个,使得多个这样的盒子托盘的总宽度或总长度中的至少一个提供了在盒子操纵系统内多个这样的盒子托盘中的每个的限定的位置和处所。根据又一实施例,盒子托盘还包括盒子盖,该盒子盖用于放置在打开的盒子上方,使得盒子的外部折板可保持在打开位置,并且其中,盒子盖包括允许接近盒子的打开的顶部部分。
46.图1示出了根据本发明实施例的用于物体处理中使用的盒子操纵系统10。系统10包括可编程运动设备12,比如具有末端执行器14(例如,真空夹持器或夹持致动器)的机器人系统,该末端执行器定位在两个输送器16、18之间,在输送器上设置有放置在盒子托盘组件上的盒子20。系统10还包括两组架空图像收集单元22、24,用于获得关于两个输送器16、18的盒子托盘组件20的盒子的内容物的图像数据。每个盒子托盘组件20还包括在盒子托盘上的识别标记26以及在盒子盖上的识别标记25。在其他实施例中,盒子本身可以包括识别标记27,如下面参考图2更详细地讨论的。系统10可以包括感测单元28和29,用于随着每个盒子托盘组件20经过感测单元28、29,感测有关识别标记25、26的感测数据(例如,图像数据或扫描数据)。对于每个相应的盒子托盘和盒子盖组合,系统可以记录该识别标记,提供有关每个盒子托盘组件的可靠信息。通常,随着每个盒子托盘组件通过感测单元28、29,两个标记25、26均被读取,并检查以确认所检测到的盒子盖对应于所检测到的盒子托盘。在其他实施例中,现在将被检测的盒子盖和被检测的盒子托盘分配为在由盒子托盘和盒子盖保持的盒子的处理期间彼此对应。
47.响应于通过感测数据的这种盒子分配,处理系统30指示可编程运动设备将一个输送器上的盒子托盘组件中的内容物移动到另一输送器上的盒子托盘组件20。可以在盒子托盘组件20的相邻排之间提供任意数量的可编程运动设备12,以进一步缩放自动化处理。在一实施例中,系统知道与每个识别标记(例如26)相关联的盒子中有什么,并且系统知道哪些物品将从一个输送器16移动到另一输送器18上的盒子托盘组件。因为每个盒子托盘组件距止挡件17的距离已知,所以系统知道每个盒子定位在输送器16、18上的位置,因为每个盒子托盘具有相同的已知宽度,并且因为盒子托盘组件被推向止挡件,通过重力馈送输送器或通过使输送器继续在朝向止挡件17的方向上推动盒子托盘组件。
48.进一步参考图2,每个盒子托盘组件20可包括由盒子托盘34接纳的盒子32,并且在盒子32的顶部放置有盒子盖36。同样,每个输送器16、18可包括可致动的止挡件17,用于选择性地停止盒子托盘组件沿每个输送器的移动。盒子托盘34的外边缘设计成沿其长度或宽度侧彼此邻接(如a处所示),使得盒子之间的距离(如b处所示)和每个盒子托盘组件的开口的位置(如c处所示)已知,如另外在图3中示出的。同样如图2所示,盒子盖36或盒子托盘34或盒子32中的任一个或两者均可包括识别标记25、26、27。因此,在处理期间,随着盒子托盘组件20经过感测单元28、29、31的前方,处理系统30记录每个相继的盒子托盘组件、盒子和盒子盖的身份。因为盒子托盘组件具有相等的宽度(或者如果在纵向对齐,则为长度),并且由于止挡件17的位置已知,因此每个盒子托盘组件的位置以及在每个盒子内的内容物的位置(和身份)都是已知的。
49.这为系统10提供了显著的一致性,极大地有助于物体的自动化处理。可以致动止挡件17有限的时间以处理由此容纳在可编程运动设备12附近的物体,然后松开以允许盒子托盘组件20通过,并允许一组新的盒子托盘组件(和相关联的新的物体)并且或一组新的目标盒子托盘组件在可编程运动设备附近呈现。同样如图2所示,标记26可以设置在盒子托盘上的凹入区域46中,该凹入区域46保护标记26免受损坏或因与其他移动或非移动结构的磨擦或其他接触而剥落,并且可以为人们提供方便的把手以用于抓持盒子托盘(特别是当在盒子托盘的相对侧上提供另一个类似的凹入区域时)。类似地,标记25可以设置在盒子盖36上的凹入区域45中,该凹入区域45保护标记25免受损坏或由于与其他移动或非移动结构的磨擦或其他接触而剥落。
50.例如,图4示出了从其中每个盒子的内容物是同类的盒子托盘组件20
′
到其中每个盒子的内容物是异类的盒子托盘组件20
″
的物体的处理。图5示出了从每个盒子的内容物是异类的盒子托盘组件20
″′
到其中在一些方面每个盒子中的内容物是同类的盒子托盘组件20
″″
的物体的处理。这样的物体处理可以提供对类似产品的传统分拣,或者可以用于产生例如目的地为共同运输处所的集合或物体,或者被选择以提供要被递送到用于分解的处所的杂物包,特别地以预定义方式(比如,在零售店处为共用小岛(isle)提供商品)。
51.图6示出了盒子托盘组件20的分解图。如图所示,盒子32(例如,标准运输尺寸的纸板盒)可以包括被盒子托盘34的顶表面35和内侧37接纳的底边缘31和侧边缘33。同样如图6所示,盒子30可以包括顶部折板38,当如图所示打开时,顶部折板38由盒子盖36的内表面40保持打开。盒子盖36还可以具有限定的边沿开口42以及角部元件44。因此,盒子32被牢固地保持在盒子托盘34内,并且盒子盖36使得折板38沿着盒子的外部保持向下,从而允许通过盒子盖36中的开口42可接近盒子的内部。如上所述,盒子盖36的凹入区域45可以包括识别标记,并且盒子托盘34的凹入区域46也可以包括识别标记。图7示出了盒子托盘组件20的宽度侧视图(而图8示出了长度侧视图),其中盒子32被牢固地安置在盒子托盘34内,并且盒子盖保持盒子32的折板38打开。
52.图9a示出了盒子托盘组件20的等距视图,其中盒子32搁置在盒子托盘34中,并且盒子顶部36保持盒子的折板38打开。参照图9b和9c,相同的盒子托盘34和盒子盖36可以与不同高度的盒子32
′
和32
″
一起使用,从而允许盒子托盘34和盒子盖36用在各种各样的盒子上。类似地,并且参照图10a和10b,相同的盒子托盘34和盒子盖36可以用在具有不同尺寸的盒子折板43,甚至少于四个折板45(例如,一个或两个折板)的盒子39、41上,如图所示。另外,在内容物以后可能沉降的情况下,盒子的内容物可以延伸到盒子盖的上方,使得能够在以后闭合盒子,特别是,盖子的侧部可能有助于支承在盒子开口上方的盒子的内容物。
53.图11示出了盒子32在以d示出的方向上下降到盒子托盘34中。如图11中的以e示出的,当盒子32靠近盒子托盘34的基部时,空气能够通过角部开口19(也在图15中示出)。通过使用这样的开口,盒子的尺寸(长度和宽度,而不是高度)可以紧贴配合到盒子托盘的内部。根据另外的实施例,盒子托盘可包括锁定止动特征以将盒子固定到盒子托盘,比如,使一个或多个侧部37向内移动以接合盒子侧部。当使用由于空盒子的重量轻而不能容易地单独输送空盒子的输送器时,使用这种盒子托盘来输送盒子可能是特别有益的。例如,如果使用滚子输送器,滚子可能会在空盒子下面旋转,而实际上并没有在期望的方向上移动盒子。盒子托盘的质量(稍微)比空盒子的质量大,并且将确保盒子托盘能易于通过输送系统输送。盒
子托盘底部的特征也有助于实现这一点,如下面将详细讨论的。
54.图12-16详细示出了盒子托盘34的其他视图。特别地,图12示出了盒子托盘34的等距视图。图13示出了盒子托盘34的宽度侧视图(具有如图所示的宽度w
基部
),而图14示出了盒子托盘34的长度侧视图(具有如图所示的长度l
基部
)。图15示出了盒子托盘34的俯视图,而图16示出了盒子托盘34的仰视图。盒子托盘34的内侧37以及盒子32接纳在其中的盒子托盘34的底部35在图9和12中进一步示出。盒子托盘34还包括凹入部46(如图12和13所示),可以在其中放置标记,并且可选地,人们可以通过凹入部46提升盒子托盘(及其上的任何盒子)。如图16所示,盒子托盘34还包括在盒子托盘34的下侧上的图案化浮突结构48。该结构48也与盒子托盘的底边缘齐平。该结构48确保盒子托盘的底部提供足够的摩擦力以在输送器上移动,但是在底部上也足够平坦,使得盒子托盘可以被踢到相邻的输送器上(如下文更详细地讨论)。图12还示出了盒子托盘的盒子踢动区域51,其可以由如下更详细地讨论的自动盒子踢动器接触。
55.图17示出了彼此堆叠的多个盒子托盘34,示出了盒子托盘可以彼此嵌套以用于堆叠。特别地,盒子托盘中的壁角部53可以接纳相邻堆叠的盒子托盘的对准特征55。而且,如图所示,盒子踢动部51可嵌套在相邻盒子托盘的侧壁的内部。这样,多个盒子托盘可以袋装在彼此之上,以便于运输(在输送器上)和存储。
56.图18-22详细示出了盒子盖36的其他视图。特别地,盒子盖36包括接合壁56,该接合壁56(在其内部上)接合盒子顶部的打开的折板。盒子盖36还包括开口壁58,开口壁58限定用于从盒子中取出或插入盒子中的物体的开口。开口壁58安装在包括肩角部57的基部上,当堆叠多个盒子盖时,其与其他相邻盒子盖的突片44对齐,如图23所示。图18示出了盒子盖36的等距视图。图19示出了盒子盖36的宽度侧视图,示出了盖子的宽度(w
盖子
),而图20示出了盒子盖36的长度侧视图,示出了盖子的长度(l
盖子
)。
57.图21示出了盒子盖36的俯视图,而图22示出了盒子盖36的仰视图。根据一实施例,盖子的宽度(w
盖子
)小于盒子托盘的宽度(w
基部
),并且盖子的长度(l
盖子
)小于盒子托盘的长度(l
基部
)。在其他实施例中,盒子盖的宽度可以与盒子托盘的宽度相同,并且盖的长度可以与盒子托盘的长度相同。在另外的实施例中,盖子的尺寸(w
盖子
、l
盖子
)可能大于盒子托盘的尺寸,而盖子的尺寸可能会决定每个盒子的处所和位置,而不是使用基部的尺寸(w
基部
、l
基部
)。图23示出了彼此堆叠的多个盒子盖36,示出了盒子盖可以彼此嵌套以用于堆叠。特别地,示出的突片44与相邻堆叠的盒子盖的肩部角部57对准。
58.图24a示出了根据本发明另一个实施例的系统的一部分,其中,盒子托盘组件20设置在输送器72上(例如,图1所示的16或18),并且附加的输送器70如图所示邻近输送器72设置。参考图24b,可以在所示的方向f上将盒子托盘组件120从输送器72选择性地移动(或踢动)到输送器70上。一旦将盒子120从输送器72移除,输送器72上剩余的盒子托盘组件然后在如图24c中以g所示的方向上移动,以填充由移除的盒子托盘组件120留下的空间。参考图24d,被移除的盒子托盘组件120然后可以沿着输送器70前进,如以h示出的,以进行进一步处理。
59.图25a和25b示出了图24a-24d的系统的后视图。特别地,图25a示出了盒子踢动器组件74可以沿着在盒子托盘组件20后面的轨道76行进,并且参考图25b,盒子踢动器组件可以是选择性地接合以促使从输送器移除盒子托盘组件。特别地,盒子踢动器可包括可致动
的(例如,通过螺线管)柱78,该柱78设计成接触盒子托盘的踢动板部分51以将盒子托盘组件推到输送器70上。这种系统可用于提供可以将空的或已完成卸载的盒子移除(例如,从输送器16移除),或者将满的或已完成装载的盒子移除(例如,从输送器18移除)。该系统的操作控制由一个或多个处理系统30提供。
60.参考图26a-26d,根据本发明的另一个实施例的盒子踢动器84可以被轨道86悬挂并沿着轨道88行进,并且可以包括可旋转的臂88和在臂的末端处的滚轮90。参照图26b-26d,当滚子90接触(盒子托盘组件180的)盒子托盘的踢动板51时,臂88继续旋转,将盒子托盘组件180从第一输送器82推到第二输送器80。特别地,当滚子90接触盒子托盘的踢动板51时,臂88的旋转使盒子托盘线性移动,并且滚子90可以在板51上的单个处所处接触板51,直到盒子托盘组件从滚子90移动远离为止。同样,将滚子设计为接触盒子托盘的踢动板部分51,以将盒子托盘组件推到输送器80上。这种系统可用于提供可以将空的或已完成卸载的盒子移除(例如,从输送器16移除),或者将满的或已完成装载的盒子移除(例如,从输送器18移除)。根据某些实施例,盒子踢动器84可以定位在盒子托盘组件中的两排盒子之间,并且盒子踢动器可以被致动以将两排的任一侧上的盒子托盘组件推到输出输送器上)。
61.在以上每个系统中,可以采用控制器30(例如,一个或多个计算机处理器)(无线或有线)来监视每个盒子托盘组件在输送器上的处所和位置,以通过可编程运动设备控制物体的处理,并维护有关盒子托盘组件中每个盒子的处理阶段的状态信息。
62.图27a和27b示出了根据本发明另一个实施例的盒子托盘50,其包括正向向外定位的磁体52和负向向外定位的磁体54。当相邻的盒子托盘相互靠近时(如图27b所示),每个磁体对(52、54)产生吸引力,该吸引力拉动盒子托盘在长度方向上靠近在一起,并有助于保持盒子托盘在长度方向上对齐。可以如上面关于盒子托盘34所讨论的那样使用盒子托盘50。
63.如图28a和28b所示,根据本发明的另一个实施例,可以提供盒子托盘60,该盒子托盘包括正向向外定位的磁体62和负向向外定位的磁体64。当相邻的盒子托盘相互靠近时(如图28b所示),每个磁体对(62、64)产生吸引力,该吸引力拉动盒子托盘在宽度方向上靠近在一起,并有助于保持盒子托盘在宽度方向上对齐。盒子托盘60可包括沿长度和宽度两者的磁体62、64,可以如上面关于盒子托盘34所讨论的那样使用盒子托盘60。
64.本领域技术人员将意识到,可以对以上公开的实施例进行许多修改和变型,而不偏离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。