:
1.本发明涉及一种空间天文望远镜自适应精密稳像复合控制方法。
背景技术:
2.深空探测是人类探索浩渺宇宙的奥秘和追求自身长远发展的必然途径,是在近地观测活动取得重大进展的基础上,向更广阔空间的必然拓展。空间天文观测可以彻底摆脱大气的影响,观测波长范围广,具有较低的天空背景噪声,可达到接近望远镜衍射极限的角分辨率,以上有利条件促使空间天文望远镜成为天文观测领域的研究热点。然而,空间天文望远镜在轨工作环境非常复杂,光学舱平台运动、姿态变化、振动以及其它各种扰动源会对空间天文望远镜工作造成不可忽略的影响。卫星平台振动显示出低频高幅,高频低幅的特性。对于高频段(10hz以上)的振动,通常利用隔离系统进行隔离,这种被动隔振的方法对于高频振动有良好的隔振效果;对低频段(10hz以下)振动,通过主动光学技术,以快摆镜(fast steering mirror,fsm)为执行机构的精密稳像系统来进行补偿。当空间望远镜完成指向控制后,通过控制fsm机构的高精度摆动来对精细导星仪检测出的望远镜视轴偏差进行补偿,从而保证成像稳定。天文观测指向稳定度主要由fsm机构的控制精度决定。为了追求高精度的控制效果,fsm机构促动器的位移分辨率要求达到纳米级,故选用压电陶瓷执行器(piezoelectric actuator,pzt)作为促动器。
技术实现要素:
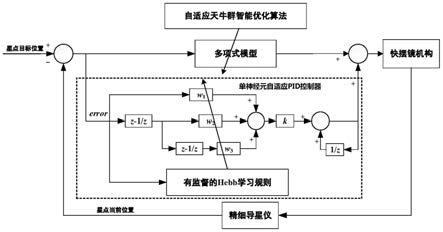
3.针对上述应用背景,本发明提出了空间天文望远镜自适应精密稳像复合控制方法,包括以下步骤:
4.1)、分别建立以精细导星仪视场内目标星点相对位置偏差为输入,以四点支撑压电驱动快摆镜机构摆动角度为输出二维方向上的多项式模型,从而可以实时解算出快摆镜机构补偿望远镜视轴指向偏差所需的反射镜面摆动角度,进而由安装关系得到每个压电陶瓷执行器的伸缩量;
5.2)、以模型输出数据与实际采集数据的均方根误差为目标函数,采用自适应天牛群智能优化算法(zhang q,gao y,li q,et al.adaptive compound control based on generalized bouc
–
wen inverse hysteresis modeling in piezoelectric actuators[j].review of scientific instruments,2021,92(11):115004)对模型参数进行辨识,并基于f检验法确定多项式模型阶数;
[0006]
3)、采用单神经元自适应pid控制算法进一步提高快摆镜机构对望远镜视轴偏差的补偿精度。
[0007]
具体地,所述步骤1中:
[0008]
1)、驱动快摆镜机构分别产生二维方向的正弦扫频反射镜面摆动角度,得到精细导星仪目标星点二维方向上的相对位置偏差输出,利用空间天文望远镜精密稳像地面试验系统采集相关数据;
[0009]
2)、精细导星仪目标星点相对位置偏差和快摆镜机构镜面摆动角度之间的关系可用如下的多项式近似表达:
[0010][0011]
其中,a,b为多项式待定系数;θ
x
和θy分别是快摆镜机构镜面绕x摆动轴摆动的角度和绕y摆动轴摆动的角度,且x摆动轴和y摆动轴相互垂直;d
x
和dy分别是精细导星仪目标星点x坐标轴方向和y坐标轴方向的相对位置偏差;n为多项式阶数;k∈[0,n],且为整数。
[0012]
3)、快摆镜机构采用四点支撑双自由度驱动,根据安装关系由二维摆动角度解算出压电陶瓷执行器的伸缩量,从而控制快摆镜机构反射镜面摆动对望远镜视轴偏差进行补偿。
[0013]
具体地,所述步骤2中:
[0014]
在前馈补偿的基础上,引入增量式pid控制器来进一步提高压电执行器定位精度,如式(2)所示:
[0015]
δu(k)=w1[e(k)-e(k-1)] w2e(k) w3[e(k)-2e(k-1) e(k-2)]
ꢀꢀ
(2)
[0016]
其中,e(k)为系统实际输出和期望输出之间误差信号,e(k-1)为前一采样时刻误差信号,e(k-2)为前两个采样时刻的误差信号,δu(k)为控制器输出信号,w1,w2,w3为控制器参数。
[0017]
为了能使闭环控制器能适应环境变化,有较强的鲁棒性,利用具有自学习和自适应能力单神经元对pid控制器参数进行调整来实现自适应、自组织功能。参数w1,w2,w3调整是根据有监督的hebb学习规则来实现的。控制算法与学习算法为:
[0018]
w1(k)=w1(k-1) ηie(k)δu(k-1)e(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0019]
w2(k)=w2(k-1) η
p
e(k)δu(k-1)[e(k)-e(k-1)]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0020]
w3(k)=w3(k-1) ηde(k)δu(k-1)[e(k)-2e(k-1) e(k-2)]
ꢀꢀꢀ
(5)
[0021][0022]
δu(k)=δu(k-1) k{w
′1(k)[e(k)-e(k-1)] w
′2(t)e(k) w
′3(t)[e(k)-2e(k-1) e(k-2)]}
ꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0023]
其中,e(k)为系统实际输出和期望输出之间误差信号,e(k-1)为前一采样时刻误差信号,e(k-2)为前两个采样时刻的误差信号,δu(k)为控制器输出信号,δu(k-1)为前一采样时刻控制器输出信号,w1,w2,w3为控制器参数,ηi为积分系数的学习速率,η
p
为比例系数的学习速率,ηd为微分系数的学习速率,k为神经元的正比例系数,w
′1(k),w
′2(k),w
′3(k)为更新的控制器参数。
[0024]
本发明建立了空间天文望远镜精密稳像开环控制模型,且考虑到开环补偿过程中存在各种扰动以及开环模型的不确定性,设计了复合控制算法来进一步提高空间天文望远镜精密稳像动态控制精度。引入了控制器参数自适应调节算法,空间天文望远镜精密稳像系统中控制模型能够根据不同天区的观测条件,甚至出现不利观测的情况下,参数可以自适应整定,为今后空间望远镜精密稳像系统实现少人或者无人干预的自主控制创造条件。
附图说明:
[0025]
图1是空间天文望远镜自适应精密稳像复合控制系统结构图。
[0026]
图2空间天文望远镜精密稳像控制地面试验系统。
[0027]
图3是基于自适应精密稳像复合控制算法的实时补偿曲线。
具体实施方式:
[0028]
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
[0029]
搭建实际控制系统用于数据采集和精密稳像地面控制试验。空间天文望远镜精密稳像控制地面试验系统由精细导星仪、激光光源,扰动快摆镜、主控模块,四点支撑压电驱动快摆镜机构组成,其中主控模块采用半实物实时仿真平台。激光器生成模拟星点并控制扰动模拟快摆镜的摆动产生模拟星点扰动,然后通过快摆镜机构进入精细导星仪,精细导星仪检测出模拟星点离中心位置的偏差并发送给主控模块来控制快摆镜机构以实现星点偏差的快速补偿。精密稳像控制系统框图如图2所示。
[0030]
首先进行快摆镜机构摆动角度和精细导星仪目标星点位置偏差多项式关系建模。以快摆镜机构镜面绕x摆动轴摆动为例,驱动压电陶瓷执行器使快摆镜机构进行最大幅度为10arcsec,频率范围为0~10hz的扫频正弦摆动,采集对应的精细导星仪目标星点位置偏差信号,采样率为100hz。。
[0031]
采用多项式模型进行曲线拟合,借助自适应天牛群优化算法辨识模型参数ai和bi。设自适应天牛群优化算法的迭代次数为300,种群数np=120,加速常数c1=2.8,c2=1.3,权重最大值ω
max
=0.9,权重最小值ω
min
=0.4,λ=0.95,初始步长step(1)=2,c=2,衰减因子初值eta(1)=0.95,位置范围设为[-10,10]。寻优算法的核心问题是选取目标函数:
[0032][0033]
其中,f为模型摆动角度与实际摆动角度的均方根误差,a
polynomial
为模型摆动角度,a为实际摆动角度的均方根误差,n为数据样本数。
[0034]
分别辨识出1~10阶多项式模型参数,然后求得相应的残差,得到阶次-残差方差图,然后根据方差比率检验(f检验)的假设检验方法来找出残差方差显著变化的阶数点,即为多项式模型的阶数。
[0035]
在搭建的验证平台进行精密稳像控制试验,验证该自适应复合控制算法在望远镜视轴偏差补偿中的有效性。实时补偿频率范围为1~10hz,最大幅度为20像素的变频变幅值星点位置偏差,补偿前星点位置偏差均方根值为9.4904pixels,补偿后星点位置偏差均方根值为0.7134pixels,将望远镜视轴偏差抑制了92.48%,补偿前后精细导星仪目标星点位置偏差曲线如图3所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。