1.本发明涉及无人机领域,具体为一种带有桥梁检测的无人机航线规划控制系统。
背景技术:
2.随着当今社会经济的高速发展,越来越多的高危工作从事者将被人工智能所取代;近年来,随着航拍技术的不断发展,无人机应用更多地渗透到各行各业;无人飞行器可分许多类别,其中无人多旋翼飞行器因结构简单、价格相对低廉,可应用于公路桥梁检测、线路巡检等领域。
3.管养部门通常定期对桥梁进行检查,多采用传统检测手段,依靠肉眼或者辅助工具(如桥检车、望远镜等)来检测桥梁主要构件是否出现裂缝、开裂破损、露筋锈蚀、支座脱空等病害;而对于梁底板,常规检测手段和方法存在局限性,可操作的难度非常大,存在检查盲区;其中局部盲区可采取人工现场察看检查,但效率低、难度大、危险系数高。
技术实现要素:
4.本发明为了弥补市场空白,提供了一种带有桥梁检测的无人机航线规划控制系统。
5.本发明的目的在于提供一种带有桥梁检测的无人机航线规划控制系统,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种带有桥梁检测的无人机航线规划控制系统,包括:飞行控制系统,所述飞行控制系统与故障指示装置之间通过电性传输信号,且飞行控制系统与检测装置之间通过电性传输信号,同时飞行控制系统与辅助装置之间通过电性传输信号;飞行控制系统,所述飞行控制系统通过检测摄像头对目标桥梁进行视频拍摄,且飞行控制系统与接收塔台之间通过gprs无线信号进行传输数据,同时接收塔台与显示屏之间通过线缆传输信号。
7.优选的,所述飞行控制系统包括模拟量输入、电路板、模拟量输出、串行通道、舵机控制板和六路舵机,且模拟量输入分别与垂直陀螺装置、速率陀螺、发动机参数模块和油门模块电性连接。
8.优选的,所述故障指示装置包括发动机故障信号灯、配电故障信号灯、停机指令灯、垂直陀螺修正模块和设备供电电路,且发动机故障信号灯、配电故障信号灯与飞行控制系统内部的开关量输入模块电性连接,停机指令灯、垂直陀螺修正模块和设备供电电路与飞行控制系统内部的开关量输出模块电性连接。
9.优选的,所述检测装置包括gps接收器、磁航向计、高度表、检测摄像头和遥控遥测装置,且gps接收器、磁航向计、高度表、检测摄像头和遥控遥测装置分别与串行通道电性连接。
10.优选的,所述辅助装置包括垂直陀螺装置、速率陀螺、发动机参数模块和油门模
块。
11.优选的,所述飞行控制系统以at89s52为主控芯片,扩展多路串口及usb接口以实现系统与外围设备的通信,同时设计相机驱动模块及三自由度步进电机驱动模块,usb口扩展由ch375芯片实现,ch375是usb总线的通用接口芯片。
12.优选的,所述飞行控制系统还设置有包括机身、飞行控制系统、通信数据链和气体传感器,飞行数据和目标桥梁的采集会实时传输回地面站的监控软件,监控软件优选为显示屏。
13.优选的,所述飞行控制系统中还设置有电源交换板,且此电源交换板的电源电压包括5v、12v和24v。
14.与现有技术相比,本发明的有益效果是:桥梁监测人员通过无线遥控器对无人机进行操控;在飞行控制系统的作用下,空中的无人机在飞行控制系统的控制下,按照航线规划,对指定监测的桥梁区域进行视频信息采集工作,并通过无线信号传输给接收塔台,并通过接收塔台,关于桥梁的监控信息通过显示屏进行播放,桥梁检测人员可通过显示屏对桥梁的各个位置进行观察工作,取代传统的人工检测的方式,安全性更高。
附图说明
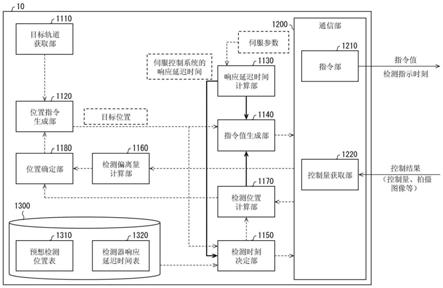
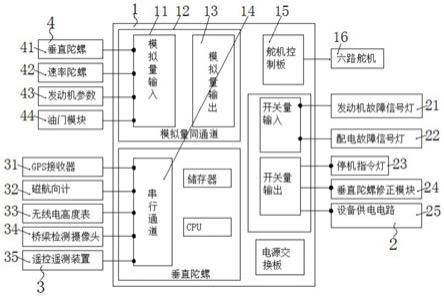
15.图1为本发明结构的飞行控制系统结构图。
16.图2为本发明结构的飞行控制系统工作流程示意图;图3为本发明结构的无人机对桥梁检测的数据传输示意图;图4为本发明结构的无人机工作流程示意图。
17.图中:1、飞行控制系统;11、模拟量输入;12、电路板;13、模拟量输出;14、串行通道;15、舵机控制板;16、六路舵机;2、故障指示装置;21、发动机故障信号灯;22、配电故障信号灯;23、停机指令灯;24、垂直陀螺修正模块;25、设备供电电路;3、检测装置;31、gps接收器;32、磁航向计;33、高度表;34、检测摄像头;35、遥控遥测装置;4、辅助装置;41、垂直陀螺装置;42、速率陀螺;43、发动机参数模块;44、油门模块;5、目标桥梁;6、接收塔台;7、显示屏。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.具体实施方式一:请参阅图1-4,本发明提供一种技术方案:一种带有桥梁检测的无人机航线规划控制系统,包括:飞行控制系统1;飞行控制系统1与故障指示装置2之间通过电性传输信号,且飞行控制系统1与检测装置3之间通过电性传输信号,同时飞行控制系统1与辅助装置4之间通过电性传输信号;飞行控制系统1,飞行控制系统1通过检测摄像头34对目标桥梁5进行视频拍摄,且
飞行控制系统1与接收塔台6之间通过gprs无线信号进行传输数据,同时接收塔台6与显示屏7之间通过线缆传输信号。
20.桥梁监测人员通过无线遥控器对无人机进行操控;在飞行控制系统1的作用下,空中的无人机在飞行控制系统1的控制下,按照航线规划,对指定监测的桥梁区域进行视频信息采集工作,并通过无线信号传输给接收塔台6,并通过接收塔台6,关于桥梁的监控信息通过显示屏7进行播放,桥梁检测人员可通过显示屏7对桥梁的各个位置进行观察工作,取代传统的人工检测的方式,安全性更高。
21.具体实施方式二:本实施方式为具体实施方式一的进一步限定,飞行控制系统1包括模拟量输入11、电路板12、模拟量输出13、串行通道14、舵机控制板15和六路舵机16,且模拟量输入11分别与垂直陀螺装置41、速率陀螺42、发动机参数模块43和油门模块44电性连接。
22.飞行控制系统1的设置,可根据目标桥梁5的具体地理环境,对无人机的路线进行提前的规划,无人机可通过飞行控制系统1事先规划好的路线进行飞行工作,实现对桥梁的检测工作。
23.具体实施方式三:本实施方式为具体实施方式一的进一步限定,故障指示装置2包括发动机故障信号灯21、配电故障信号灯22、停机指令灯23、垂直陀螺修正模块24和设备供电电路25,且发动机故障信号灯21、配电故障信号灯22与飞行控制系统1内部的开关量输入模块电性连接,停机指令灯23、垂直陀螺修正模块24和设备供电电路25与飞行控制系统1内部的开关量输出模块电性连接。
24.当发动机故障或者配电系统发生故障的时候,此时对应的故障灯会亮起,避免无人机带病运行。
25.具体实施方式四:本实施方式为具体实施方式一的进一步限定,检测装置3包括gps接收器31、磁航向计32、高度表33、检测摄像头34和遥控遥测装置35,且gps接收器31、磁航向计32、高度表33、检测摄像头34和遥控遥测装置35分别与串行通道14电性连接。
26.检测摄像头34在无人机的作用下,对目标桥梁5进行检测工作,飞行控制系统1的设置,可依据目标桥梁5的具体地理信息和结构信息对无人机的航线进行规划工作。
27.具体实施方式五:本实施方式为具体实施方式一的进一步限定,辅助装置4包括垂直陀螺装置41、速率陀螺42、发动机参数模块43和油门模块44。
28.具体实施方式六:本实施方式为具体实施方式一的进一步限定,飞行控制系统1以at89s52为主控芯片,扩展多路串口及usb接口以实现系统与外围设备的通信,同时设计相机驱动模块及三自由度步进电机驱动模块,usb口扩展由ch375芯片实现,ch375是usb总线的通用接口芯片。
29.具体实施方式七:本实施方式为具体实施方式一的进一步限定,飞行控制系统1还设置有包括机身、飞行控制系统、通信数据链和气体传感器,飞行数据和目标桥梁5的采集会实时传输回地面站的监控软件,监控软件优选为显示屏7。
30.空中的无人机系统包括了机身、飞行控制系统、通信数据链以及气体传感器;最后,飞行数据的采集会实时传输回地面站的监控软件,监控软件为显示屏7,监控者可通过观察显示屏7,远程检测桥梁的具体信息,取代人工检测的方式,安全性得到明显的提高。
31.具体实施方式八:本实施方式为具体实施方式一的进一步限定,飞行控制系统1中
还设置有电源交换板,且此电源交换板的电源电压包括5v、12v和24v。
32.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。