技术特征:
1.一种空间天文望远镜自适应精密稳像复合控制方法,其特征在于包括以下步骤:1)、分别建立以精细导星仪视场内目标星点相对位置偏差为输入,以四点支撑压电驱动快摆镜机构摆动角度为输出二维方向上的多项式模型,从而实时解算出快摆镜机构补偿望远镜视轴指向偏差所需的反射镜面摆动角度,进而由安装关系得到每个压电陶瓷执行器的伸缩量;2)、以模型输出与实际采集数据均方根误差为目标函数,采用自适应天牛群智能优化算法对模型参数进行辨识,并基于f检验法确定多项式模型阶数;3)、采用单神经元自适应pid控制算法进一步提高快摆镜机构对望远镜视轴偏差的补偿精度。2.根据权利要求1所述的空间天文望远镜自适应精密稳像复合控制方法,其特征在于,步骤1)中所述多项式模型建立过程具体为:1)、分别驱动快摆镜机构分别产生二维方向上的正弦扫频镜面摆动角度,得到精细导星仪目标星点二维方向上的相对位置偏差输出,利用空间天文望远镜精密稳像地面试验系统采集相关数据;2)、精细导星仪目标星点相对位置偏差和快摆镜机构镜面摆动角度之间的关系可用如下的多项式近似表达:其中,a,b为多项式待定系数;θ
x
和θ
y
分别是快摆镜机构镜面绕x摆动轴摆动的角度和绕y摆动轴摆动的角度,且x摆动轴和y摆动轴相互垂直;d
x
和d
y
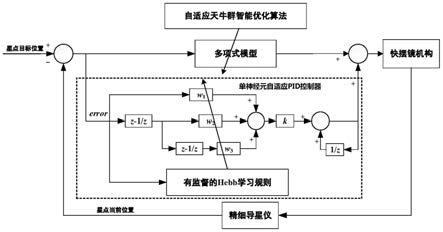
分别是精细导星仪目标星点x坐标轴方向和y坐标轴方向的相对位置偏差;n为多项式阶数;k∈[0,n],且为整数。3)、快摆镜机构采用四点支撑双自由度驱动,根据安装关系由二维摆动角度解算出压电陶瓷执行器的伸缩量,从而控制快摆镜机构反射镜面摆动对望远镜视轴偏差进行补偿。3.根据权利要求1所述的空间天文望远镜自适应精密稳像复合控制方法,其特征在于,步骤3)中所述的单神经元自适应pid控制算法具体过程为:在前馈补偿的基础上,引入增量式pid控制器来进一步提高压电执行器定位精度,如式(2)所示:δu(k)=w1[e(k)-e(k-1)] w2e(k) w3[e(k)-2e(k-1) e(k-2)]
ꢀꢀꢀꢀ
(2)其中,e(k)为系统实际输出和期望输出之间误差信号,e(k-1)为前一采样时刻误差信号,e(k-2)为前两个采样时刻的误差信号,δu(k)为控制器输出信号,w1,w2,w3为控制器参数。为了能使闭环控制器能适应环境变化,有较强的鲁棒性,利用具有自学习和自适应能力单神经元对pid控制器参数进行调整来实现自适应、自组织功能。参数w1,w2,w3调整是根据有监督的hebb学习规则来实现的。控制算法与学习算法为:w1(k)=w1(k-1) η
i
e(k)δu(k-1)e(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)w2(k)=w2(k-1) η
p
e(k)δu(k-1)[e(k)-e(k-1)]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)w3(k)=w3(k-1) η
d
e(k)δu(k-1)[e(k)-2e(k-1) e(k-2)]
ꢀꢀꢀꢀ
(5)
δu(k)=δu(k-1) k{w
′1(k)[e(k)-e(k-1)] w
′2(t)e(k) w
′3(t)[e(k)-2e(k-1) e(k-2)]}
ꢀꢀꢀꢀ
(7)其中,e(k)为系统实际输出和期望输出之间误差信号,e(k-1)为前一采样时刻误差信号,e(k-2)为前两个采样时刻的误差信号,δu(k)为控制器输出信号,δu(k-1)为前一采样时刻控制器输出信号,w1,w2,w3为控制器参数,η
i
为积分系数的学习速率,η
p
为比例系数的学习速率,η
d
为微分系数的学习速率,k为神经元的正比例系数,w
′1(k),w
′2(k),w
′3(k)为更新的控制器参数。
技术总结
本发明公开了一种空间天文望远镜自适应精密稳像复合控制方法,包括如下步骤:(1)分别建立以精细导星仪视场内目标星点相对位置偏差为输入,以四点支撑压电驱动快摆镜机构摆动角度为输出的二维方向上的多项式模型,从而实时解算出补偿望远镜视轴指向偏差所需的镜面摆动角度,进而得到每个压电陶瓷执行器的伸缩量;(2)以模型输出与实际采集数据均方根误差为目标函数,采用自适应天牛群智能优化算法辨识模型参数,并基于F检验法确定多项式模型阶数;(3)采用单神经元自适应PID控制算法进一步提高望远镜视轴指向偏差的补偿精度。本发明降低了多项式模型不确定性和控制过程中各种扰动对望远镜精密稳像控制精度的影响,能适应环境变化,有较强的鲁棒性。有较强的鲁棒性。有较强的鲁棒性。
技术研发人员:张泉 魏传新 周显宜 房陈岩 朱雨霁 李清灵 高源蓬 尹达一
受保护的技术使用者:中国科学院上海技术物理研究所
技术研发日:2022.02.24
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。