经元互连特点构建而成一种局部递归神经网络,它是在对角递归神经网络的基础上演变而 来的递归神经网络。准对角递归神经网络不仅在隐含层神经元上构建了自反馈通道,还在 隐含层神经元之间增加了互连通道,具有更强的信息挖掘能力。与全连接递归神经网络不 同,准对角递归神经网络仅在相邻隐含层神经元之间建立连接,其构建的递归权值矩阵为 准对角矩阵。准对角递归神经网络减少了连接权数,因而极大地减少了网络计算量,加快 了网络的学习速度,更适用于实时控制。综上所述,准对角递归神经网络具有强大的映射 能力、记忆能力和动态响应能力,构建的递归通道能够实时捕捉系统的动态特性,更适用 于非线性系统的多变量控制问题。
6.根据以上分析,本发明针对城市固废焚烧工艺过程特点,设计了一种城市固废焚烧过 程的多回路准对角递归神经网络pid控制器。首先,针对控制过程特性进行了分析,选取 了关键操作量与被控量;接着,通过数据驱动构建了多输入多输出takagi-sugeno模糊神 经网络被控对象模型;然后,构建了基于准对角递归神经网络的多变量pid控制器;最后, 通过北京市某固废焚烧厂的过程数据验证了控制器的有效性。
技术实现要素:
7.本发明获得了一种面向城市固废焚烧过程的多回路准对角递归神经网络pid控制器, 该控制器分析了模型影响因素,基于数据驱动构建了多输入多输出takagi-sugeno模糊神 经网络被控对象模型,构建了具有自反馈通道与互连通道的准对角递归神经网络模型并将 其用于多回路pid控制的参数自整定,解决了城市固废焚烧过程中的多变量控制问题;
8.本发明采用了如下的技术方案及实现步骤:
9.面向城市固废焚烧过程的多回路准对角递归神经网络pid控制器方法包括以下步骤:
10.1.面向城市固废焚烧过程的多回路准对角递归神经网络pid控制方法,其特征在于, 包括以下步骤:
11.(1)城市固废焚烧数据采集:通过单向隔离系统采集城市固废焚烧过程的关键操作变 量:干燥炉排空气流量(左1、右1、左2、右2)、燃烧炉排1段空气流量(左1、右1、左2、 右2)、燃烧炉排2段空气流量(左1、右1、左2、右2)、燃尽炉排空气流量(左、右)、一次 风总流量、二次风流量、干燥炉排速度(左内、右内、左外、右外)、燃烧炉排1段速度(左 内、右内、左外、右外)、燃烧炉排2段速度(左内、右内、左外、右外)和燃尽炉排速度(左 内、右内),采集关键被控变量:主蒸汽流量、炉膛温度和烟气含氧量;
12.(2)控制特性分析:采用皮尔逊相关系数ρ
αβ
对操作变量α
l
与被控变量β
l
之间的相关性 进行评估,其计算方法为:
[0013][0014]
式中,n为样本总数,根据计算结果选取一次风总流量、二次风流量、干燥炉排速度作为 关键操作变量;
[0015]
(3)数据预处理:通过剔除异常数据与数据归一化对采集得到的数据进行预处理,
计算 步骤如下:
[0016]
①
剔除异常数据:通过3σ准则对异常数据进行剔除,首先,设定样本数据的维度为 q
×
k,q为被控变量数量,k为样本的总数量,样本数据用k,q为被控变量数量,k为样本的总数量,样本数据用表示,其中为样本均值,其标准偏差σs的计算方法为:
[0017][0018]
当对应的剩余误差符合以下条件时,则对此执行剔除操作,其计算方 法为:
[0019][0020]
②
数据归一化:对样本数据进行归一化,计算归一化后的数据样本其计算方 法如下:
[0021][0022]
其中,为变量s的样本向量,经过归一化处理之后,每个样本数据范围均在[0,1]之间;
[0023]
(4)被控对象模型设计:通过数据驱动构建了多输入多输出takagi-sugeno模糊神经网 络被控对象模型,其包括输入层、隶属函数层、规则层、后件层和输出层共5层,对其数 学描述如下:
[0024]
①
输入层:该层共有n个神经元,n为3,其作用将输入值进行传递,当第k个样本进 入时,输入层的输出为:
[0025]
xi(k),i=1,2,...,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0026]
②
隶属函数层:该层共有n
×
m个神经元,m为12,每个节点的输出代表对应输入量 的隶属度值,隶属函数为:
[0027][0028]
式中,c
ij
(k)与δ
ij
(k)分别为隶属度函数的中心和宽度,其初始值由rand随机函数生成范围 在[0,2]之间均匀分布的随机实数;
[0029]
③
规则层:该层共有m个神经元,采用模糊连乘算子作为模糊逻辑规则,规则层的输 出为:
[0030][0031]
④
后件层:该层共有m
×
q个神经元,q为3,每个节点执行t-s型模糊规则的线性求 和,计算每条规则所对应输出的后件参数其计算过程如下:
[0032]
[0033]
式中,为模糊系统的参数,其初始值设为0.3,x0(k),x1(k),
…
, xn(k)为输入变量,x0(k)为输入常数,用于增强网络平移能力,其值为1;
[0034]
⑤
输出层:该层设有q个输出节点,每个节点对输入参数执行加权求和,其计算公式 如下:
[0035][0036]
⑥
模型参数学习:使用梯度下降算法调整网络参数,首先,定义误差计算方法如下:
[0037][0038]
式中,ys(k)为第k个输入样本对应的第s个实际输出,为第k个输入样本对应的第s个 计算输出,es(k)为两者之间的误差,依据误差对网络的中心、宽度和模糊系统参数更新算 法定义如下:
[0039][0040][0041][0042]
式中,η为在线学习率,η的取值范围为[0.01,0,05],c
ij
(k-1)、δ
ij
(k-1)和分别为 第k-1个样本输入时网络隶属函数层的中心、宽度和模糊系统的参数,完成本次参数更新 后,输入训练样本数据xi(k 1),重复步骤
①
~
⑥
,直至所有训练样本全部输入,训练样本 数为总样本数k的80%,之后对模型进行迭代训练,直至迭代次数达到最大迭代值it
max
, it
max
为500,此时建模误差达到最小,将此时的模型确立为被控对象模型;
[0043]
(5)多变量控制器设计:该控制器用于对被控对象模型施加控制,其由准对角递归神经 网络自整定模型、被控对象jacobian信息辨识、pid参数整定机制和pid控制器组成,各 部分功能描述如下:
[0044]
①
准对角递归神经网络自整定模型:
[0045]
输入层:该层设有ξ个神经元,其作用是将输入值进行传递,第s个模型在时刻t时, 网络的输入可表示为:
[0046]isr
(t),r=1,2,...,ξ,s=1,2,...,q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0047]
式中,ξ=3,q=3,输入为[us(t-1),ys(t),1],其中,us(t-1)为t-1时刻的操作变量实际值, ys(t)为被控变量,常数1为偏置项,其作用是增强网络的平移能力;
[0048]
回归层:该层共有ω个神经元,ω为7,回归层输入g
sg
(t)包括输入层信息、自反馈 信息与互连神经元信息,将其表示为:
[0049][0050]
式中,d
sg
(t-1)为模型s在t-1时刻的回归层神经元的输出,为输入层到回归层之间 的连接权值,为回归层神经元的递归权值,g=1,2,...,ω,
[0051]
回归层各个神经元的递归权值可表示为如下所示的准对角矩阵形式:
[0052][0053]
根据公式(15)、(16),通过sigmoid函数f()对回归层的每个节点进行激活,计算回归 层输出为:
[0054][0055]
输出层:该层有单个输出节点,该节点对输入参数执行加权求和,输出层输出可表示 为:
[0056][0057]
式中,为回归层到输出层之间的连接权值;
[0058]
②
被控对象jacobian信息辨识:
[0059]
首先,将系统输出与网络输出的误差作为辨识器的调整信号,定义被控对象系统的辨 识误差为:
[0060]ems
(t)=ys(t)-y
ms
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0061]
式中,ys(t)为被控量实际值,y
ms
(t)为模型计算得出的被控量估计值;
[0062]
定义被控对象性能指标js(t)如下:
[0063][0064]
采用最小均方算法对准对角递归神经网络模型的参数进行更新:
[0065][0066]
式如下:
[0090][0091][0092][0093]
式中,和分别为pid的比例系数、积分系数和微分系数对应的学习率,其值分 别为5^10-5
、3^10-5
、1^10-5
,为被控对象的jacobian信息,由公式(27)辨识获 得。
[0094]
本发明的创造性主要体现在:
[0095]
(1)本发明针对城市固废焚烧过程特性进行了分析,结合布风布料过程提取了能够反应 燃烧状态的关键操作量与被控量;
[0096]
(2)本发明采用数据驱动的方法建立了基于多输入多输出takagi-sugeno模糊神经网络 的被控对象模型,构建被控对象模型具有多任务学习能力,能够利用多任务之间的互补信 息同时对多个被控量进行精准拟合,并对网络参数进行在线更新;
[0097]
(3)本发明构建了多回路pid控制器,设计具有自反馈通道与互连通道的准对角递归 神经网络模型,利用其处理瞬态信息的能力对pid参数进行整定,实现了对多变量的同步 控制;
附图说明
[0098]
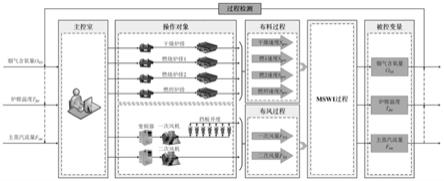
图1是本发明的城市固废焚烧过程控制流程图
[0099]
图2是本发明的基于takagi-sugeno型模糊神经网络的多输入多输出被控对象模型图
[0100]
图3是本发明的城市固废焚烧过程的准对角递归神经网络pid多回路控制策略图
[0101]
图4是本发明的准对角递归神经网络模型结构图
[0102]
图5是本发明的主蒸汽流量设定值控制跟踪结果图
[0103]
图6是本发明的炉膛温度设定值控制跟踪结果图
[0104]
图7是本发明的烟气含氧量设定值控制跟踪结果图
[0105]
图8是本发明的一次风流量自整定过程图
[0106]
图9是本发明的二次风流量自整定过程图
[0107]
图10是本发明的干燥炉排速度自整定过程图
具体实施方式
[0108]
本发明获得了一种面向城市固废焚烧过程的多回路准对角递归神经网络pid控制器, 该控制器分析了模型影响因素并提取了关键被控量与操作量,基于数据驱动构建了多输入 多输出takagi-sugeno模糊神经网络被控对象模型,构建了具有自反馈通道与互连通道的 准对角递归神经网络模型并将其用于多回路pid控制的参数自整定,解决了城市固废焚烧 过程中的多变量控制问题;
[0109]
本发明采用了如下的技术方案及实现步骤:
[0110]
面向城市固废焚烧过程的多回路准对角递归神经网络pid控制器方法包括以下步骤:
[0111]
1.面向城市固废焚烧过程的多回路准对角递归神经网络pid控制方法,其特征在于, 包括以下步骤:
[0112]
(1)城市固废焚烧数据采集:通过单向隔离系统采集城市固废焚烧过程的关键操作变 量:干燥炉排空气流量(左1、右1、左2、右2)、燃烧炉排1段空气流量(左1、右1、左2、 右2)、燃烧炉排2段空气流量(左1、右1、左2、右2)、燃尽炉排空气流量(左、右)、一次 风总流量、二次风流量、干燥炉排速度(左内、右内、左外、右外)、燃烧炉排1段速度(左 内、右内、左外、右外)、燃烧炉排2段速度(左内、右内、左外、右外)和燃尽炉排速度(左 内、右内),采集关键被控变量:主蒸汽流量、炉膛温度和烟气含氧量;
[0113]
(2)控制特性分析:采用皮尔逊相关系数ρ
αβ
对操作变量α
l
与被控变量β
l
之间的相关性 进行评估,其计算方法为:
[0114][0115]
式中,n为样本总数,根据计算结果选取一次风总流量、二次风流量、干燥炉排速度作为 关键操作变量;
[0116]
(3)数据预处理:通过剔除异常数据与数据归一化对采集得到的数据进行预处理,计算 步骤如下:
[0117]
①
剔除异常数据:通过3σ准则对异常数据进行剔除,首先,设定样本数据的维度为 q
×
k,q为被控变量数量,k为样本的总数量,样本数据用k,q为被控变量数量,k为样本的总数量,样本数据用表示,其中为样本均值,其标准偏差σs的计算方法为:
[0118]
[0119]
当对应的剩余误差符合以下条件时,则对此执行剔除操作,其计算方 法为:
[0120][0121]
②
数据归一化:对样本数据进行归一化,计算归一化后的数据样本其计算方 法如下:
[0122][0123]
其中,为变量s的样本向量,经过归一化处理之后,每个样本数据范围均在[0,1]之间;
[0124]
(4)被控对象模型设计:通过数据驱动构建了多输入多输出takagi-sugeno模糊神经网 络被控对象模型,其包括输入层、隶属函数层、规则层、后件层和输出层共5层,对其数 学描述如下:
[0125]
①
输入层:该层共有n个神经元,n为3,其作用将输入值进行传递,当第k个样本进 入时,输入层的输出为:
[0126]
xi(k),i=1,2,...,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0127]
②
隶属函数层:该层共有n
×
m个神经元,m为12,每个节点的输出代表对应输入量 的隶属度值,隶属函数为:
[0128][0129]
式中,c
ij
(k)与δ
ij
(k)分别为隶属度函数的中心和宽度,其初始值由rand随机函数生成范围 在[0,2]之间均匀分布的随机实数;
[0130]
③
规则层:该层共有m个神经元,采用模糊连乘算子作为模糊逻辑规则,规则层的输 出为:
[0131][0132]
④
后件层:该层共有m
×
q个神经元,q为3,每个节点执行t-s型模糊规则的线性求 和,计算每条规则所对应输出的后件参数其计算过程如下:
[0133][0134]
式中,为模糊系统的参数,其初始值设为0.3,x0(k),x1(k),
…
, xn(k)为输入变量,x0(k)为输入常数,用于增强网络平移能力,其值为1;
[0135]
⑤
输出层:该层设有q个输出节点,每个节点对输入参数执行加权求和,其计算公式 如下:
[0136]
[0137]
⑥
模型参数学习:使用梯度下降算法调整网络参数,首先,定义误差计算方法如下:
[0138][0139]
式中,ys(k)为第k个输入样本对应的第s个实际输出,为第k个输入样本对应的第s个 计算输出,es(k)为两者之间的误差,依据误差对网络的中心、宽度和模糊系统参数更新算 法定义如下:
[0140][0141][0142][0143]
式中,η为在线学习率,η的取值范围为[0.01,0,05],c
ij
(k-1)、δ
ij
(k-1)和分别为 第k-1个样本输入时网络隶属函数层的中心、宽度和模糊系统的参数,完成本次参数更新 后,输入训练样本数据xi(k 1),重复步骤
①
~
⑥
,直至所有训练样本全部输入,训练样本 数为总样本数k的80%,之后对模型进行迭代训练,直至迭代次数达到最大迭代值it
max
, it
max
为500,此时建模误差达到最小,将此时的模型确立为被控对象模型;
[0144]
(5)多变量控制器设计:该控制器用于对被控对象模型施加控制,其由准对角递归神经 网络自整定模型、被控对象jacobian信息辨识、pid参数整定机制和pid控制器组成,各 部分功能描述如下:
[0145]
①
准对角递归神经网络自整定模型:
[0146]
输入层:该层设有ξ个神经元,其作用是将输入值进行传递,第s个模型在时刻t时, 网络的输入可表示为:
[0147]isr
(t),r=1,2,...,ξ,s=1,2,...,q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0148]
式中,ξ=3,q=3,输入为[us(t-1),ys(t),1],其中,us(t-1)为t-1时刻的操作变量实际值, ys(t)为被控变量,常数1为偏置项,其作用是增强网络的平移能力;
[0149]
回归层:该层共有ω个神经元,ω为7,回归层输入g
sg
(t)包括输入层信息、自反馈 信息与互连神经元信息,将其表示为:
[0150][0151]
式中,d
sg
(t-1)为模型s在t-1时刻的回归层神经元的输出,为输入层到回归层之间 的连接权值,为回归层神经元的递归权值,g=1,2,...,ω,
[0152]
回归层各个神经元的递归权值可表示为如下所示的准对角矩阵形式:
[0153][0154]
根据公式(15)、(16),通过sigmoid函数f()对回归层的每个节点进行激活,计算回归 层输出为:
[0155][0156]
输出层:该层有单个输出节点,该节点对输入参数执行加权求和,输出层输出可表示 为:
[0157][0158]
式中,为回归层到输出层之间的连接权值;
[0159]
②
被控对象jacobian信息辨识:
[0160]
首先,将系统输出与网络输出的误差作为辨识器的调整信号,定义被控对象系统的辨 识误差为:
[0161]ems
(t)=ys(t)-y
ms
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0162]
式中,ys(t)为被控量实际值,y
ms
(t)为模型计算得出的被控量估计值;
[0163]
定义被控对象性能指标js(t)如下:
[0164][0165]
采用最小均方算法对准对角递归神经网络模型的参数进行更新:
[0166][0167][0168][0169]
式中,和分别输入层、回归层和输出层的学习率,其值为4^10-4
,损失函数对 权值的求导过程如下:
[0170][0171]
式中,f
′
(g
sg
(t))为回归层sigmoid函数的导数;
[0172][0173][0174]
根据以上推导,计算被控对象jacobian信息为:
[0175][0176]
式中,us(t)为t时刻的操作变量实际值,为操作变量对应的输入层权值;
[0177]
③
pid控制器:
[0178]
定义控制器输入误差如下:
[0179]es
(t)=rs(t)-ys(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0180]
式中,rs(t)为被控量设定值;
[0181]
定义误差的比例、积分与微分分别为其计算如下:
[0182][0183]
式中,t为采样时间间隔,采样间隔为1秒,为采样时段内的时间点;
[0184]
pid控制器的输出表示为:
[0185][0186]
式中,和分别为pid的比例系数、积分系数和微分系数;
[0187]
④
pid参数整定机制:
[0188]
对多变量pid控制器的参数进行整定,首先,定义pid性能指标为:
[0189][0190]
根据性能指标,计算pid的比例系数积分系数微分系数的调整公 式如下:
[0191][0192][0193][0194]
式中,和分别为pid的比例系数、积分系数和微分系数对应的学习率,其值分 别为5^10-5
、3^10-5
、1^10-5
,为被控对象的jacobian信息,由公式(27)辨识获 得。
[0195]
图1为城市固废焚烧过程控制流程;图2为基于takagi-sugeno型模糊神经网络的多 输入多输出被控对象模型;图3为城市固废焚烧过程的准对角递归神经网络pid多回路控 制策略;图4为准对角递归神经网络模型结构;图5为主蒸汽流量设定值控制跟踪结果, x轴:时间,单位是s,y轴:主蒸汽流量,单位是t/h,黑虚线为设定值、灰实线为跟踪 结果;图6为炉膛温度设定值控制跟踪结果,x轴:时间,单位是s,y轴:炉膛温度, 单位是℃,虚线为设定值、黑线为跟踪结果;图7为烟气含氧量设定值控制跟踪结果,x 轴:时间,单位是s,y轴:烟气含氧量,单位是%,虚线为设定值、黑线为跟踪结果;图 8为一次风流量自整定过程,x轴:时间,单位是s,y轴:一次风流量,单位是km3n/h; 图9为二次风流量自整定过程,x轴:时间,单位是s,y轴:二次风流量,单位是km3n/h; 图10为干燥炉排速度自整定过程,x轴:时间,单位是s,y轴:干燥炉排速度,单位是%; 结果表明该控制器对城市固废焚烧过程多变量控制的有效性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。