1.本发明涉及水下机器人技术领域,特别的为可提高拍摄画面清晰度的水下机器人的数据采集监控系统。
背景技术:
2.水下机器人作为水下作业及水下勘察的强有力工具,在近海石油开采、海洋环境数据采集、海底管道维修、水下结构物检测等方面扮演着至关重要的角色;水下机器人由于在军事领域以及民用领域具有着广泛的应用前景,使其成为了海洋探索与开发的研究热点。
3.但是,现有技术中,现有的水下机器人在使用的时候,由于水下的环境复杂,会导致水下机器人无法及时的对水下遇到的障碍物进行及时的发现,从而会导致水下机器人与障碍物发生碰撞,造成水下机器人的损坏,从而会降低水下机器人的使用寿命,同时现有的水下机器在水下进行画面拍摄的时候,由于水下有悬浮颗粒物,哪怕在特别清澈的水中也会有悬浮的各种颗粒物,这些东西会反射摄像头的光线,导致拍出来的照片看上去就像有一层雾一样,从而在使用上,会降低拍摄的画面的清晰度,从而不能更好的对水下环境进行监测使用。
技术实现要素:
4.本发明提供的发明目的在于提供可提高拍摄画面清晰度的水下机器人的数据采集监控系统,用于解决上述背景技术中提出的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:可提高拍摄画面清晰度的水下机器人的数据采集监控系统,包括:外部控制器和水下机器人;
6.所述外部控制器的内部设置有操作控制模块、操作信号输出模块、报警模块、无线接收模块、信息处理模块、信息存储模块和显示模块;
7.所述水下机器人的内部设置有摄像采集系统、声呐采集系统、主控制器、操作信号接收模块、无线发射模块、主动避让模块、传感器接口模块、推进器驱动模块、电源监测管理模块和姿态传感系统;
8.所述操作控制模块用于对水下机器人发送操作控制指令;
9.所述操作信号输出模块用于对操作控制的指令进行输出;
10.所述报警模块用于对水下机器人遇到的障碍信号进行报警;
11.所述无线接收模块用于对无线发射模块的发出的信号进行接收;
12.所述信息处理模块用于对接收的信号进行处理;
13.所述信息存储模块用于对接收的信息进行存储;
14.所述显示模块用于将摄像采集系统拍摄的画面和声呐采集系统成像的画面显示出来;
15.所述操作信号接收模块用于对操作信号输出模块输出的信号进行接收;
16.所述主控制器控制水下机器人内部的各个系统和模块,并对各个信号进行接收和处理;
17.所述无线发射模块用于对主控制器需要发射的信号进行发射处理;
18.所述主动避让模块用于对水下机器人遇到的障碍信号进行及时的避让;
19.所述传感器接口模块用于对姿态传感系统的信息进行接收;
20.所述推进器驱动模块用于控制水下机器人的运动状态;
21.所述电源监测管理模块用于对水下机器人的电量情况进行控制和管理。
22.作为本发明进一步的方案:所述姿态传感系统包括三轴加速度计、三轴陀螺仪和深度传感器;
23.所述三轴加速度计用于对水下机器人的空间加速度进行测量,并反映水下机器人的运动性质;
24.所述三轴陀螺仪用于对水下机器人的角速度进行测量,并判别水下机器人的运动状态;
25.所述深度传感器用于对水下机器人下潜的深度进行及时的了解。
26.作为本发明进一步的方案:所述摄像采集系统包括摄像头、画面接收模块、特征提取模块、画面处理模块、图像自适应变频模块、上传模块和照明模块。
27.作为本发明进一步的方案:所述摄像头用于对水下的画面进行拍摄;
28.所述画面接收模块用于对摄像头拍摄的画面进行接收;
29.所述特征提取模块用于对接收的画面进行特征的提取;
30.所述画面处理模块用于对特征提取的画面进行处理;
31.所述图像自适应变频模块用于对画面数据采用高速存储器做同步处理;
32.所述上传模块用于对画面进行上传处理;
33.所述照明模块包括亮度调节模块,所述亮度调节模块用于对水下的亮度进行调节。
34.作为本发明进一步的方案:所述声呐采集系统包括有声呐图像传送模块、声呐图像特征提取模块;声呐图像处理模块、声呐图像序列模块、声呐采集模块和声呐发射模块。
35.作为本发明进一步的方案:所述声呐发射模块用于对声波进行发射;
36.所述声呐采集模块用于对反射的声波进行采集;
37.所述声呐图像序列模块用于对采集的数据成像形成声呐图像,将连续的声呐图像组成声呐图像序列;
38.所述声呐图像处理模块用于对声呐图像序列模块中的每帧图像进行预处理;
39.所述声呐图像特征提取模块用于对提取预处理后的每帧声呐图像的尺度不变特征变换特征;
40.所述声呐图像传送模块用于对成型的画面进行传输。
41.作为本发明进一步的方案:所述操作控制模块的输出端通过导线与操作信号输出模块的输入端电性连接,所述操作信号输出模块的输出端通过无线区域网与操作信号接收模块的输入端无线连接,所述操作信号接收模块的输出端通过导线与主控制器的输入端电性连接。
42.作为本发明进一步的方案:所述主控制器的输出端通过导线与摄像采集系统的输
入端双向电性连接,所述主控制器的输出端通过导线与声呐采集系统的输入端双向电性连接;所述主控制器的输出端通过导线分别与电源监测管理模块、推进器驱动模块、传感器接口模块和主动避让模块的输入端双向电性连接,所述传感器接口模块的输出端通过导线与姿态传感系统的输入端双向电性。
43.作为本发明进一步的方案:所述主控制器的输出端通过导线与无线发射模块的输入端电性连接,所述无线发射模块的输出端通过无线区域网与无线接收模块的输入端无线连接,所述无线接收模块的输出端通过导线与报警模块的输入端电性连接。
44.本发明提供了可提高拍摄画面清晰度的水下机器人的数据采集监控系统。具备以下有益效果:
45.(1)、该可提高拍摄画面清晰度的水下机器人的数据采集监控系统,通过声呐采集系统内部的声呐图像序列模块可以对采集的数据成像形成声呐图像,将连续的声呐图像组成声呐图像序列,再通过声呐图像处理模块可以对声呐图像序列模块中的每帧图像进行预处理,再通过声呐图像特征提取模块可以对提取预处理后的每帧声呐图像的尺度不变特征变换特征,从而在使用上,可以及时的对水下的障碍物进行成像处理,并将成像的画面发送到主控制器,通过主控制器可以将成像的画面发送到外部控制器,并在外部控制器的显示模块上显示出来,同时会使得报警模块发送报警,在使用上,便于工作者可以及时的对水下的障碍物进行躲避使用,有效的降低了水下机器人与障碍物之间发送碰撞,提高了水下机器人的使用寿命。
46.(2)、该可提高拍摄画面清晰度的水下机器人的数据采集监控系统,在接收到障碍物成像画面后,工作者无法进行及时调整的时候,水下机器人内部的主动避让模块会进行自动避让,通过主动避让模块从而会将主动避让信号传输到主控制器,通过主控制器,从而会将信号传输到推进器驱动模块,通过推进器驱动模块的工作,可以控制水下机器人进行主动避让障碍物,在使用上,有效的降低了水下机器人与障碍物之间发送碰撞,提高了水下机器人的使用寿命。
47.(3)、该可提高拍摄画面清晰度的水下机器人的数据采集监控系统,在对水下的画面进行拍摄的时候,通过摄像采集系统内部的图像自适应变频模块对画面数据采用高速存储器做同步处理,在使用上,可以有效的提高了拍摄画面的清晰度,同时通过照明模块,可以对水下的光线进行自适应调节,降低光线对摄像头的反射情况,在使用上,可以更好的提高了拍摄画面的清晰度,便于对水下的环境进行监测使用。
附图说明
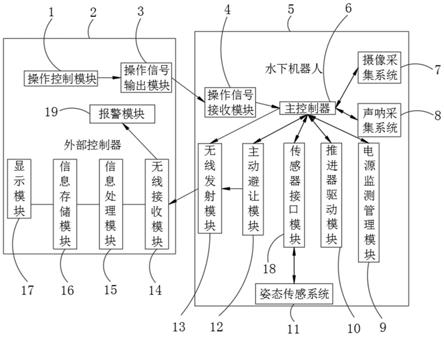
48.图1为本发明的整体系统原理图;
49.图2为本发明的姿态传感系统原理图;
50.图3为本发明的摄像采集系统原理图;
51.图4为本发明的声呐采集系统原理图。
52.图中:1、操作控制模块;2、外部控制器;3、操作信号输出模块;4、操作信号接收模块;5、水下机器人;6、主控制器;7、摄像采集系统;701、照明模块;702、亮度调节模块;703、上传模块;704、图像自适应变频模块;705、画面处理模块;706、特征提取模块;707、画面接收模块;708、摄像头;8、声呐采集系统;801、声呐图像传送模块;802、声呐图像特征提取模
块;803、声呐图像处理模块;804、声呐图像序列模块;805、声呐采集模块;806、声呐发射模块;9、电源监测管理模块;10、推进器驱动模块;11、姿态传感系统;1101、三轴加速度计;1102、三轴陀螺仪;1103、深度传感器;12、主动避让模块;13、无线发射模块;14、无线接收模块;15、信息处理模块;16、信息存储模块;17、显示模块;18、传感器接口模块;19、报警模块。
具体实施方式
53.下面结合附图与实施例对本发明作进一步说明:
54.参照图1-4所示:可提高拍摄画面清晰度的水下机器人的数据采集监控系统,包括:外部控制器2和水下机器人5;外部控制器2的内部设置有操作控制模块1、操作信号输出模块3、报警模块19、无线接收模块14、信息处理模块15、信息存储模块16和显示模块17;水下机器人5的内部设置有摄像采集系统7、声呐采集系统8、主控制器6、操作信号接收模块4、无线发射模块13、主动避让模块12、传感器接口模块18、推进器驱动模块10、电源监测管理模块9和姿态传感系统11;操作控制模块1用于对水下机器人5发送操作控制指令;操作信号输出模块3用于对操作控制的指令进行输出;报警模块19用于对水下机器人5遇到的障碍信号进行报警;无线接收模块14用于对无线发射模块13的发出的信号进行接收;信息处理模块15用于对接收的信号进行处理;信息存储模块16用于对接收的信息进行存储;显示模块17用于将摄像采集系统7拍摄的画面和声呐采集系统8成像的画面显示出来;操作信号接收模块4用于对操作信号输出模块3输出的信号进行接收;主控制器6控制水下机器人5内部的各个系统和模块,并对各个信号进行接收和处理;无线发射模块13用于对主控制器6需要发射的信号进行发射处理;主动避让模块12用于对水下机器人5遇到的障碍信号进行及时的避让;传感器接口模块18用于对姿态传感系统11的信息进行接收;推进器驱动模块10用于控制水下机器人5的运动状态;电源监测管理模块9用于对水下机器人5的电量情况进行控制和管理,其中,主控制器6与推进器驱动模块10通过rs485总线方式连接,采用modbus通讯协议实现推进器控制指令的传递;传感器接口模块18用于对三轴加速度计1101、三轴陀螺仪1102、深度传感器1103等进行数据采集和预处理,并通过串行口向主控制器6发送传感器数据;电源监测管理模块9由多级dc-dc变换器和单片机组成,为主控制器6、推进器驱动模块10、传感器接口模块18等提供电源,并能对各供电回路的电压、电流进行实时监测和估计电池的剩余电量。
55.具体地,姿态传感系统11包括三轴加速度计1101、三轴陀螺仪1102和深度传感器1103,三轴加速度计1101主要可分为压电式、电容式及热感应式三种,按输入轴数目分类,有单轴、双轴和三轴的加速度计,三轴加速度传感器是基于加速度的基本原理去实现工作,具有体积小和重量轻特点,可以测量空间加速度,能够全面准确反映物体的运动性质;三轴陀螺仪1102可以同时测定六个方向的位置,移动轨迹,加速,单轴的只能测量两个方向的量,也就是一个系统需要三个陀螺仪,而三轴的一个就能替代三个单轴的,三轴的体积小、重量轻、结构简单、可靠性好;通过三轴加速度计1101、三轴陀螺仪1102和深度传感器1103可以及时的了解到水下机器人的位置,三轴加速度计1101用于对水下机器人5的空间加速度进行测量,并反映水下机器人5的运动性质;三轴陀螺仪1102用于对水下机器人5的角速度进行测量,并判别水下机器人5的运动状态;深度传感器1103用于对水下机器人5下潜的深度进行及时的了解。
56.具体地,摄像采集系统7包括摄像头708、画面接收模块707、特征提取模块706、画面处理模块705、图像自适应变频模块704、由于不同摄像机送入的图像数据的帧率是不同的,该图像自适应变频模块704使用高速存储器将不同摄像机送入的数据做同步处理,同步处理后的信号通过上传模块703传输到主控制器6,上传模块703和照明模块701,摄像头708用于对水下的画面进行拍摄;画面接收模块707用于对摄像头708拍摄的画面进行接收;特征提取模块706用于对接收的画面进行特征的提取;画面处理模块705用于对特征提取的画面进行处理;图像自适应变频模块704用于对画面数据采用高速存储器做同步处理;上传模块703用于对画面进行上传处理;照明模块701包括亮度调节模块702,亮度调节模块702用于对水下的亮度进行调节,摄像头708采用专业深海星光级4k摄像头,1/2.5英寸cmos图像传感器,在对水下的画面进行拍摄的时候,通过摄像采集系统7内部的图像自适应变频模块704对画面数据采用高速存储器做同步处理,在使用上,可以有效的提高了拍摄画面的清晰度,同时通过照明模块701,可以对水下的光线进行自适应调节,降低光线对摄像头708的反射情况,在使用上,可以更好的提高了拍摄画面的清晰度,便于对水下的环境进行监测使用。
57.具体地,声呐采集系统8包括有声呐图像传送模块801、声呐图像特征提取模块802;声呐图像处理模块803、声呐图像序列模块804、声呐采集模块805和声呐发射模块806,声呐发射模块806用于对声波进行发射;声呐采集模块805用于对反射的声波进行采集;声呐图像序列模块804用于对采集的数据成像形成声呐图像,将连续的声呐图像组成声呐图像序列;声呐图像处理模块803用于对声呐图像序列模块804中的每帧图像进行预处理;声呐图像特征提取模块802用于对提取预处理后的每帧声呐图像的尺度不变特征变换特征;声呐图像传送模块801用于对成型的画面进行传输,通过声呐采集系统8内部的声呐图像序列模块804可以对采集的数据成像形成声呐图像,将连续的声呐图像组成声呐图像序列,再通过声呐图像处理模块803可以对声呐图像序列模块804中的每帧图像进行预处理,再通过声呐图像特征提取模块802可以对提取预处理后的每帧声呐图像的尺度不变特征变换特征,从而在使用上,可以及时的对水下的障碍物进行成像处理,并将成像的画面发送到主控制器6,通过主控制器6可以将成像的画面发送到外部控制器2,并在外部控制器2的显示模块17上显示出来,同时会使得报警模块19发送报警,在使用上,便于工作者可以及时的对水下的障碍物进行躲避使用,在接收到障碍物成像画面后,工作者无法进行及时调整的时候,水下机器人5内部的主动避让模块12会进行自动避让,通过主动避让模块12从而会将主动避让信号传输到主控制器6,通过主控制器6,从而会将信号传输到推进器驱动模块10,通过推进器驱动模块10的工作,可以控制水下机器人5进行主动避让障碍物,有效的降低了水下机器人5与障碍物之间发送碰撞,提高了水下机器人5的使用寿命。
58.具体地,操作控制模块1的输出端通过导线与操作信号输出模块3的输入端电性连接,操作信号输出模块3的输出端通过无线区域网与操作信号接收模块4的输入端无线连接,操作信号接收模块4的输出端通过导线与主控制器6的输入端电性连接。
59.具体地,主控制器6的输出端通过导线与摄像采集系统7的输入端双向电性连接,主控制器6的输出端通过导线与声呐采集系统8的输入端双向电性连接;主控制器6的输出端通过导线分别与电源监测管理模块9、推进器驱动模块10、传感器接口模块18和主动避让模块12的输入端双向电性连接,传感器接口模块18的输出端通过导线与姿态传感系统11的
输入端双向电性。
60.具体地,主控制器6的输出端通过导线与无线发射模块13的输入端电性连接,无线发射模块13的输出端通过无线区域网与无线接收模块14的输入端无线连接,无线接收模块14的输出端通过导线与报警模块19的输入端电性连接。
61.本发明中,通过声呐采集系统8内部的声呐图像序列模块804可以对采集的数据成像形成声呐图像,将连续的声呐图像组成声呐图像序列,再通过声呐图像处理模块803可以对声呐图像序列模块804中的每帧图像进行预处理,再通过声呐图像特征提取模块802可以对提取预处理后的每帧声呐图像的尺度不变特征变换特征,从而在使用上,可以及时的对水下的障碍物进行成像处理,并将成像的画面发送到主控制器6,通过主控制器6可以将成像的画面发送到外部控制器2,并在外部控制器2的显示模块17上显示出来,同时会使得报警模块19发送报警,在使用上,便于工作者可以及时的对水下的障碍物进行躲避使用,在接收到障碍物成像画面后,工作者无法进行及时调整的时候,水下机器人5内部的主动避让模块12会进行自动避让,通过主动避让模块12从而会将主动避让信号传输到主控制器6,通过主控制器6,从而会将信号传输到推进器驱动模块10,通过推进器驱动模块10的工作,可以控制水下机器人5进行主动避让障碍物,有效的降低了水下机器人5与障碍物之间发送碰撞,提高了水下机器人5的使用寿命,在对水下的画面进行拍摄的时候,通过摄像采集系统7内部的图像自适应变频模块704对画面数据采用高速存储器做同步处理,在使用上,可以有效的提高了拍摄画面的清晰度,同时通过照明模块701,可以对水下的光线进行自适应调节,降低光线对摄像头708的反射情况,在使用上,可以更好的提高了拍摄画面的清晰度,便于对水下的环境进行监测使用。
62.以上的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。