技术特征:
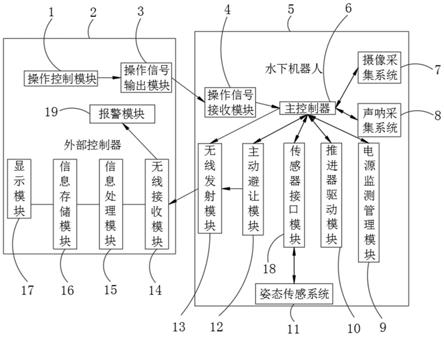
1.可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于,包括:外部控制器(2)和水下机器人(5);所述外部控制器(2)的内部设置有操作控制模块(1)、操作信号输出模块(3)、报警模块(19)、无线接收模块(14)、信息处理模块(15)、信息存储模块(16)和显示模块(17);所述水下机器人(5)的内部设置有摄像采集系统(7)、声呐采集系统(8)、主控制器(6)、操作信号接收模块(4)、无线发射模块(13)、主动避让模块(12)、传感器接口模块(18)、推进器驱动模块(10)、电源监测管理模块(9)和姿态传感系统(11);所述操作控制模块(1)用于对水下机器人(5)发送操作控制指令;所述操作信号输出模块(3)用于对操作控制的指令进行输出;所述报警模块(19)用于对水下机器人(5)遇到的障碍信号进行报警;所述无线接收模块(14)用于对无线发射模块(13)的发出的信号进行接收;所述信息处理模块(15)用于对接收的信号进行处理;所述信息存储模块(16)用于对接收的信息进行存储;所述显示模块(17)用于将摄像采集系统(7)拍摄的画面和声呐采集系统(8)成像的画面显示出来;所述操作信号接收模块(4)用于对操作信号输出模块(3)输出的信号进行接收;所述主控制器(6)控制水下机器人(5)内部的各个系统和模块,并对各个信号进行接收和处理;所述无线发射模块(13)用于对主控制器(6)需要发射的信号进行发射处理;所述主动避让模块(12)用于对水下机器人(5)遇到的障碍信号进行及时的避让;所述传感器接口模块(18)用于对姿态传感系统(11)的信息进行接收;所述推进器驱动模块(10)用于控制水下机器人(5)的运动状态;所述电源监测管理模块(9)用于对水下机器人(5)的电量情况进行控制和管理。2.根据权利要求1所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述姿态传感系统(11)包括三轴加速度计(1101)、三轴陀螺仪(1102)和深度传感器(1103);所述三轴加速度计(1101)用于对水下机器人(5)的空间加速度进行测量,并反映水下机器人(5)的运动性质;所述三轴陀螺仪(1102)用于对水下机器人(5)的角速度进行测量,并判别水下机器人(5)的运动状态;所述深度传感器(1103)用于对水下机器人(5)下潜的深度进行及时的了解。3.根据权利要求1所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述摄像采集系统(7)包括摄像头(708)、画面接收模块(707)、特征提取模块(706)、画面处理模块(705)、图像自适应变频模块(704)、上传模块(703)和照明模块(701)。4.根据权利要求3所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述摄像头(708)用于对水下的画面进行拍摄;所述画面接收模块(707)用于对摄像头(708)拍摄的画面进行接收;所述特征提取模块(706)用于对接收的画面进行特征的提取;所述画面处理模块(705)用于对特征提取的画面进行处理;
所述图像自适应变频模块(704)用于对画面数据采用高速存储器做同步处理;所述上传模块(703)用于对画面进行上传处理;所述照明模块(701)包括亮度调节模块(702),所述亮度调节模块(702)用于对水下的亮度进行调节。5.根据权利要求1所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述声呐采集系统(8)包括有声呐图像传送模块(801)、声呐图像特征提取模块(802);声呐图像处理模块(803)、声呐图像序列模块(804)、声呐采集模块(805)和声呐发射模块(806)。6.根据权利要求5所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述声呐发射模块(806)用于对声波进行发射;所述声呐采集模块(805)用于对反射的声波进行采集;所述声呐图像序列模块(804)用于对采集的数据成像形成声呐图像,将连续的声呐图像组成声呐图像序列;所述声呐图像处理模块(803)用于对声呐图像序列模块(804)中的每帧图像进行预处理;所述声呐图像特征提取模块(802)用于对提取预处理后的每帧声呐图像的尺度不变特征变换特征;所述声呐图像传送模块(801)用于对成型的画面进行传输。7.根据权利要求1所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述操作控制模块(1)的输出端通过导线与操作信号输出模块(3)的输入端电性连接,所述操作信号输出模块(3)的输出端通过无线区域网与操作信号接收模块(4)的输入端无线连接,所述操作信号接收模块(4)的输出端通过导线与主控制器(6)的输入端电性连接。8.根据权利要求1所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述主控制器(6)的输出端通过导线与摄像采集系统(7)的输入端双向电性连接,所述主控制器(6)的输出端通过导线与声呐采集系统(8)的输入端双向电性连接;所述主控制器(6)的输出端通过导线分别与电源监测管理模块(9)、推进器驱动模块(10)、传感器接口模块(18)和主动避让模块(12)的输入端双向电性连接,所述传感器接口模块(18)的输出端通过导线与姿态传感系统(11)的输入端双向电性。9.根据权利要求1所述的可提高拍摄画面清晰度的水下机器人的数据采集监控系统,其特征在于:所述主控制器(6)的输出端通过导线与无线发射模块(13)的输入端电性连接,所述无线发射模块(13)的输出端通过无线区域网与无线接收模块(14)的输入端无线连接,所述无线接收模块(14)的输出端通过导线与报警模块(19)的输入端电性连接。
技术总结
本发明提供可提高拍摄画面清晰度的水下机器人的数据采集监控系统,涉及水下机器人技术领域。该可提高拍摄画面清晰度的水下机器人的数据采集监控系统,包括:外部控制器和水下机器人;所述外部控制器的内部设置有操作控制模块、操作信号输出模块、报警模块、无线接收模块、信息处理模块、信息存储模块和显示模块。该可提高拍摄画面清晰度的水下机器人的数据采集监控系统,可以及时的对水下的障碍物进行成像处理,并将成像的画面发送到主控制器,通过主控制器可以将成像的画面发送到外部控制器,并在外部控制器的显示模块上显示出来,同时会使得报警模块发送报警,在使用上,便于工作者可以及时的对水下的障碍物进行躲避使用,有效的降低了水下机器人与障碍物之间发送碰撞,提高了水下机器人的使用寿命。高了水下机器人的使用寿命。高了水下机器人的使用寿命。
技术研发人员:向亚丽 颜冰 马剑飞
受保护的技术使用者:向亚丽
技术研发日:2022.02.24
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。