1.本发明涉及多旋翼飞行器领域,尤其涉及一种多余度的飞行控制器。
背景技术:
2.旋翼类飞行器具有较为高效的低空飞行能力,已经广泛的应用于航拍、物流、农业等领域。飞行控制器是飞行器的核心控制部件,其任务是通过中央处理器接收内部传感器(陀螺仪、加速度计、磁力计、气压计等)和外部传感器(gps定位、外部磁力计等)数据,通过飞行控制算法转换成电子调速器的控制信号,进而控制飞行器的姿态、位置和高度。上述飞行控制器通常应用于无人机等小型飞行器,而中大型飞行器以及载人飞行器则需要更高等级的安全性,要求飞行控制器具有复杂环境中稳定运行的性能。现有的飞行控制器使用基于一个微控制器加多路传感器的架构,可靠性和稳定性较差,当微控制器出现问题或者一个传感器故障的时候,飞行器就会面临风险。
3.专利号为cn201621454735.2的专利中,提供了一种多旋翼无人机飞行控制器,用于提高飞行控制器的运算处理能力、外设扩展能力、抗震能力及稳定性,包括:飞行控制主板、柔性传感器板、接口板及减震装置,所述飞行控制主板上设置有主cortex-m4微控制器和从cortex-m3微控制器,所述柔性传感器板上设置有两套陀螺仪、加速度计和地磁传感器,所述接口板包括左侧接口和右侧接口,所述减震装置为一块凝胶垫。此方案仅将从cortex-m3微控制器作为接口扩展和传感器余度,没有独立控制飞行器的能力,因此飞行控制器没有安全余度。
技术实现要素:
4.本发明的目的在于针对现有技术的不足,提供了一种多余度的飞行控制器。
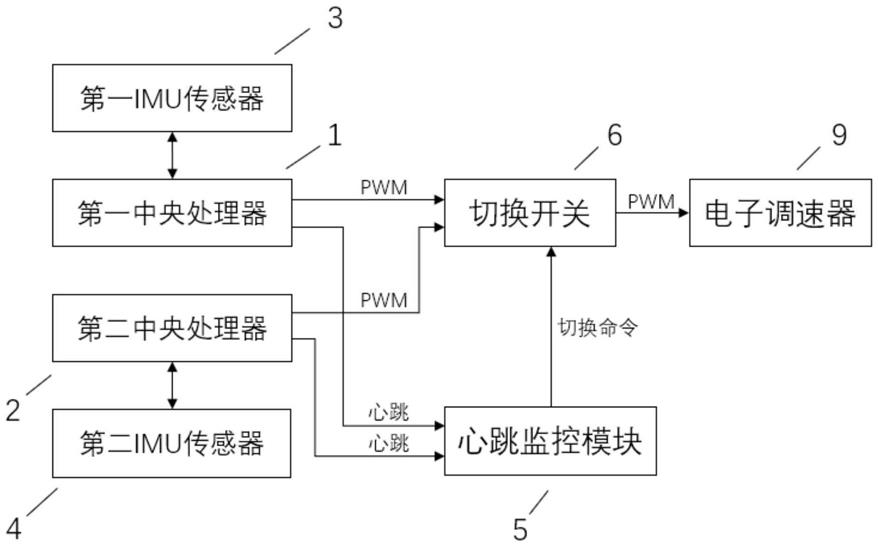
5.本发明的目的是通过以下技术方案来实现的:一种多余度的飞行控制器,包括第一中央处理器、第二中央处理器、心跳监控模块、第一imu传感器、第二imu传感器、切换开关和电源模块;所述第一中央处理器不停地读取第一imu传感器的数据,当第一中央处理器读取的数据正常则向心跳监控模块发送第一心跳信号,反之则停止发送第一心跳信号;所述第二中央处理器不停地读取第二imu传感器的数据,当第二中央处理器读取的数据正常则向心跳监控模块发送第二心跳信号,反之则停止发送第二心跳信号;所述第一中央处理器和第二中央处理器两者独立工作,分别输出pwm信号至切换开关;
6.所述心跳监控模块使用以下方式通过切换开关选择第一中央处理器或第二中央处理器输出pwm信号:
7.a)当所述心跳监控模块能正常接收到第一心跳信号,心跳监控模块发送命令给切换开关,切换开关选择输出第一中央处理器的pwm信号;
8.b)当所述心跳监控模块无法接收到第一心跳信号,却能正常接收到第二心跳信号,心跳监控模块发送命令给切换开关,切换开关选择输出第二中央处理器的pwm信号;
9.c)当所述心跳监控模块无法接收到第一心跳信号和第二心跳信号,则心跳监控模
块可单独控制飞行器紧急降落;
10.所述电源模块为其他所有器件供电。
11.进一步地,所述电源模块包括电池、第一降压dcdc、第二降压dcdc、电源管理芯片、第一ldo和第二ldo;所述电池并联输入第一降压dcdc和第二降压dcdc,产生两路5v电压并输入电源管理芯片;所述电源管理芯片控制第一ldo和第二ldo供电的稳定性;所述第一ldo和第二ldo分别输出电压,为其他所有器件供电。
12.进一步地,所述第一心跳信号和第二心跳信号可以是一段脉冲或者其他形式的信号。
13.进一步地,所述第一心跳信号和第二心跳信号的频率大于100赫兹。
14.进一步地,所述心跳监控模块可以是专用芯片或可编程逻辑器件,并行处理心跳信号的信息。
15.进一步地,还包括其他传感器及其他外设,所述第一中央处理器和第二中央处理器分别不停地读取其他传感器及其他外设的数据。
16.进一步地,所述第一中央处理器、第一imu传感器、心跳监控模块、切换开关和电源模块分别布局在pcb板的正面;所述第二中央处理器、第二imu传感器、其他传感器和其他外设分别布局在pcb板的反面。
17.本发明的有益效果是:
18.1.采用本发明的一种多余度的飞行控制器,使用两个中央处理器的架构,两个中央处理器互相平等,互为备份,最大限度的提高了飞行控制器的安全稳定性;
19.2.采用本发明的一种多余度的飞行控制器,使用心跳监控模块实时接收中央处理器及各传感器的状态数据,当监测到异常状态时,能实时无缝切换到另一个中央处理器及传感器,非常有效的提高了飞行控制器的安全稳定性;
20.3.采用本发明的一种多余度的飞行控制器,使用两路降压型dcdc芯片加电源管理芯片的配置,两路5v电压将互为备份,无缝切换;最大限度的提高了电源的安全稳定性;
21.4.采用本发明的一种多余度的飞行控制器,将第一中央处理器和第二中央处理器及对应的传感器分别布置在硬件pcb的正反两面,最大限度的提高了对飞行器状态和飞行姿态采样的精度;同时在硬件结构上提升了飞行控制器的安全稳定性。
附图说明
22.图1为本发明一种多余度的飞行控制器实施例一的系统总体架构示意图;
23.图2为本发明一种多余度的飞行控制器实施例一的电源示意图;
24.图3为本发明一种多余度的飞行控制器实施例二的系统总体架构示意图;
25.图4为本发明一种多余度的飞行控制器实施例二的pcb布局示意图;
26.图5为本发明一种多余度的飞行控制器实施例二的系统流程图;
27.图中,1-第一中央处理器,2-第二中央处理器,3-第一imu传感器,4-第二imu传感器,5-心跳监控模块,6-切换开关,7-其他传感器,8-其他外设,9-电子调速器,10-电池,11-第一降压dcdc,12-第二降压dcdc,13-电源管理芯片,14-第一ldo,15-第二ldo,16-电源模块。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加明白清楚,结合附图和实施例,对本发明进一步的详细说明,应当理解,此处所描述的具体实施例仅仅用以解释本发明,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均在本发明保护范围。
29.实施例1
30.如图1所示的一种多余度的飞行控制器,包括第一中央处理器1、第二中央处理器2、心跳监控模块5、第一imu传感器3、第二imu传感器4、切换开关6和电源模块16;所述第一中央处理器1与第一imu传感器3通信,第一中央处理器1不停地读取第一imu传感器3的数据,所述第一imu传感器3的数据包括飞行器的姿态数据,当第一中央处理器1读取的数据正常则向心跳监控模块5发送第一心跳信号,若第一中央处理器1读取的数据异常则停止向心跳监控模块5发送第一心跳信号;所述第二中央处理器2与第二imu传感器4通信,第二中央处理器2不停地读取第二imu传感器4的数据,所述第二imu传感器4的数据包括飞行器的姿态数据,若第二中央处理器3读取的数据正常则向心跳监控模块5发送第二心跳信号,若第二中央处理器2读取的数据异常则停止向心跳监控模块5发送第二心跳信号;第一imu传感器3和第二imu传感器4相互独立,分别感知飞行器的姿态;第一中央处理器1和第二中央处理器2两者独立工作,分别输出pwm信号至切换开关6;
31.所述心跳监控模块5使用以下方式通过切换开关6选择第一中央处理器1或第二中央处理器2输出pwm信号:
32.a)当所述心跳监控模块5能正常接收到第一心跳信号,心跳监控模块5发送命令给切换开关6,切换开关6选择输出第一中央处理器1的pwm信号;
33.b)当所述心跳监控模块5无法接收到第一心跳信号,却能正常接收到第二心跳信号,心跳监控模块5发送命令给切换开关6,切换开关6选择输出第二中央处理器2的pwm信号;
34.c)当所述心跳监控模块5无法接收到第一心跳信号和第二心跳信号,则心跳监控模块5可单独控制飞行器紧急降落;
35.所述电源模块16为其他所有器件供电。
36.所述心跳监控模块5可以是专用芯片或可编程逻辑器件,并行处理心跳信号的信息。
37.一种多余度的飞行控制器的工作过程如下:
38.第一中央处理器1与第一imu传感器3通信,当第一中央处理器1能正常接收第一imu传感器3的数据,第一中央处理器1每隔一段时间(毫秒级)向心跳监控模块5发送第一心跳信号,反之则停止发送第一心跳信号;同理,所述第二中央处理器2与第二imu传感器4通信,当第二中央处理器2能正常接收第二imu传感器4的数据,第二中央处理器2每隔一段时间(毫秒级)向心跳监控模块5发送第二心跳信号,反之则停止发送第二心跳信号;第一中央处理器1和第二中央处理器2两者独立工作,分别输出pwm信号至切换开关6;
39.所述心跳信号可以是一段脉冲或者其他形式的信号;
40.当第一中央处理器1和第二中央处理器2都正常向心跳监控模块5发送心跳信号时,心跳监控模块5向切换开关6发送切换命令,切换开关6默认选择第一中央处理器1输出
的pwm信号;
41.当第一中央处理器1停止向心跳监控模块5发送第一心跳信号,第二中央处理器2正常向心跳监控模块5发送第二心跳信号时,心跳监控模块5向切换开关6发送切换命令,切换开关6选择第二中央处理器2输出的pwm信号;
42.当第二中央处理器2停止向心跳监控模块5发送第二心跳信号,第一中央处理器1正常向心跳监控模块5发送第一心跳信号时,心跳监控模块5向切换开关6发送切换命令,切换开关6选择第一中央处理器1输出的pwm信号;
43.输出的pwm信号输入至飞行器中的电子调速器,控制飞行器的电机运转,使飞行器可以正常飞行;
44.当第一中央处理器1和第二中央处理器2都停止向心跳监控模块5发送心跳信号,心跳监控模块5可单独控制飞行器紧急降落。
45.第一中央处理器1或第二中央处理器2向心跳监控模块5发送心跳信号的频率大于100赫兹,表示心跳监控模块5能在10毫秒以内处理第一中央处理器1或第二中央处理器2发过来的心跳信号;当心跳监控模块5检测到心跳信号异常时,飞行器在10毫秒以内处于失控状态,此时多余度的飞行控制器中的心跳监控模块5输出切换命令或者执行紧急降落,都能将飞行器重新控制到正常状态。
46.图2为一种多余度的飞行控制器中的电源模块16的结构示意图,所述电源模块16包括电池10、第一降压dcdc11、第二降压dcdc12、电源管理芯片13、第一ldo14和第二ldo15;所述电池10并联输入第一降压dcdc 11和第二降压dcdc12,产生两路5v电压并输入电源管理芯片13;所述电源管理芯片13负责管理两路5v电压,当检测到其中一路5v失效时,能快速无缝切换到另外一路5v电压,保证对第一ldo 14和第二ldo15供电的稳定性;所述第一ldo 14和第二ldo 15分别输出3.3v和1.8v电压,为其他所有器件供电;两路5v电压将互为备份,无缝切换;最大限度的提高了电源的安全稳定性。
47.实施例2
48.如图3,本发明还提供了一种多余度的飞行控制器的结构示意图,该多余度的飞行控制器还包括其他传感器7和其他外设8,所述其他传感器7和其他外设8分别与第一中央处理器1与第二中央处理器2通信;所述第一中央处理器1和第二中央处理器2分别不停地读取其他传感器7及其他外设(8)的数据。
49.所述其他传感器7包括气压计、电子罗盘、gps等,所述其他外设8包括数传模块、遥控接收机等。
50.如图4所示的一种多余度的飞行控制器pcb布局图,第一中央处理器1、第一imu传感器3、心跳监控模块5、切换开关6和电源模块16分别布局在pcb板的正面(top面);所述第二中央处理器2、第二imu传感器4、其他传感器7和其他外设8分别布局在pcb板的反面(bottom面);将第一中央处理器1和第二中央处理器2及其他器件分别布置在硬件pcb的正反两面,最大限度的提高了对飞行器状态和飞行姿态采样的精度;同时在硬件结构上提升了飞行控制器的安全稳定性。
51.如图5所示,是实施例2的一个应用案例,对第一中央处理器1、第二中央处理器2和心跳监控模块5的功能进一步描述;系统上电运行后,第一中央处理器1和第二中央处理器2分别不停地读取第一imu传感器3或第二imu传感器4以及其他传感器7和其他外设8的数据;
若数据正常,第一中央处理器1每隔一段时间(毫秒级)向心跳监控模块5发送第一心跳信号,若数据异常,第一中央处理器1停止向心跳监控模块5发送第一心跳信号;同理,若数据正常,第二中央处理器2每隔一段时间(毫秒级)向心跳监控模块5发送第一心跳信号,若数据异常,第二中央处理器2停止向心跳监控模块5发送第二心跳信号;当所述心跳监控模块5能正常接收到第二心跳信号,心跳监控模块5发送命令给切换开关6,切换开关6选择输出第一中央处理器1的pwm信号;当所述心跳监控模块5无法接收到第一心跳信号,却能正常接收到第二心跳信号,心跳监控模块5发送命令给切换开关6,切换开关6选择输出第二中央处理器2的pwm信号;当所述心跳监控模块5无法接收到第一心跳信号和第二心跳信号,则执行紧急降落;系统上电运行时,所述心跳监控模块5会不停地检测心跳信号。
52.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。