1.本实用新型涉及包装机械技术领域,具体涉及一种机器人抓手装箱机。
背景技术:
2.市场对于物料(比如:袋状物、条状物、盒状物等)的装箱一直需求火热,而这些物料的装箱在现有生产过程中主要是通过人工逐个放入纸箱内的方法;然而人工装箱劳动强度大,稳定一致性差,工作效率低,并且容易对包装袋造成污染和损坏。采用双delta3机器人抓手装箱机可以代替人工排列模式,通过无人化的自动排列装箱,能减少大量的生产线工人,所以为了实现整线全自动化装箱生产,结合性价比,双delta3机器人抓手装箱机更加稳定,安全,应用布局更加灵活,装箱效率更高。
技术实现要素:
3.本实用新型要解决的技术问题是,针对现有技术存在的上述缺陷,提供了一种机器人抓手装箱机,实现物料的自动分拣、排列和装箱,相比人工装箱,大量减少了生产操作人员和劳动强度,且安全性高,性价比高,稳定性高,工作效率高,操作简单,占地面积小,尤其适用于场地、预算有限,但又要求实现自动化,对安全及可靠性有一定要求的用户。
4.本实用新型为解决上述技术问题所采用的技术方案是:
5.一种机器人抓手装箱机,包括箱坯部件、成箱部件、纸箱输送部件、排列机器人抓手、进料输送机、摆盘输送机和装箱机器人抓手,摆盘输送机布置于进料输送机一侧,进料输送机的输出端设置于排列机器人抓手抓取区,排列机器人抓手布置于进料输送机的输出端和摆盘输送机的输入端上方,排列机器人抓手用于将散乱的物料从进料输送机上抓取到摆盘输送机上进行排列,纸箱输送部件布置于摆盘输送机的输出端一侧,装箱机器人抓手布置于摆盘输送机的输出端和纸箱输送部件上方,装箱机器人抓手用于将摆盘输送机上的物料抓取到纸箱输送部件上的纸箱内进行装箱,纸箱输送部件的输入端与成箱部件的输出端对接,成箱部件的输入端与箱坯部件的输出端对接。
6.按照上述技术方案,排列机器人抓手为双delta3机器人抓手,装箱机器人抓手为五连杆抓手。
7.按照上述技术方案,箱坯部件包括箱坯成型阻挡装置、箱坯输送部件和固定机架,箱坯输送部件设置于固定机架上,箱坯成型阻挡装置设置于箱坯输送部件的输出端,箱坯输送部件的两侧设有挡板;箱坯放置于箱坯输送部件上,挡板从两侧对箱坯进行限位,箱坯成型阻挡装置对箱坯输送部件上的箱坯进行定位并防止箱坯超出箱坯输送部件及掉落。
8.按照上述技术方案,箱坯输送部件包括直线导轨、箱坯推动块、箱坯气缸和输送带,输送带通过两个输送带轮布置于固定机架上,直线导轨布置于输送带的一侧,箱坯推动块设置于直线导轨上,并与输送带连接,箱坯气缸固设于固定机架上,箱坯气缸的一端与输送带连接,箱坯气缸带动同步带来回运转,输送带带动箱坯推动块沿直线导轨来回移动;箱坯放置于输送带上,箱坯推动块从后方对输送带上的箱坯进行限位。
9.按照上述技术方案,成箱部件包括上部机架、吸取机构和成型机构,吸取机构设置于上部机架上,成型机构设置于吸取机构的下端;
10.吸取机构包括直线移动单元和吸取支架,上部机架上设有横向直线导轨,吸取支架设置于横向直线导轨上,直线移动单元与吸取支架连接,直线移动单元带动吸取支架沿横向直线导轨前后移动,吸取支架上设有吸盘组件,用于吸取纸箱坯的箱面;
11.成型机构包括升降驱动件、升降板、折小页组件和折大页组件,升降驱动件设置于吸取支架上,升降驱动件与升降板连接,带动升降板上下移动,折小页组件和折大页组件均设置于升降板上。
12.按照上述技术方案,直线移动单元包括第一电机和两个同步带轮,两个同步带轮分布于上部机架上,两个同步带轮之间通过同步带连接,其中一个同步带轮与第一电机连接,同步带与吸取支架连接,第一电机通过同步带轮及同步带带动吸取支架沿横向直线导轨前后移动。
13.按照上述技术方案,吸取机构还包括连杆,吸取支架包括长边吸取支架和短边吸取支架,长边吸取支架的上端设置于横向直线导轨上,短边吸取支架的一侧通过转轴与长边吸取支架的一侧铰接,短边吸取支架的另一侧与连杆的一端铰接,连杆的另一端与上部机架铰接,短边吸取支架随长边吸取支架沿横向直线导轨来回移动过程中,连杆带动短边吸取支架绕转轴转动,使短边吸取支架与长边吸取支架在呈直线分布状态和相互垂直的状态之间转变,长边吸取支架和短边吸取支架上均分布有吸取吸盘。
14.按照上述技术方案,折小页组件包括两个折小页板和两个小页支架,两个小页支架沿水平横向布置于升降板上,两个折小页板分别相对布置于两个小页支架上,两个折小页板的外端分别与两个小页支架铰接,两个小页支架上均设有折小页气缸,两个折小页气缸的一端分别与两个折小页板的底部铰接,两个折小页气缸带动两个折小页板绕相应铰接点相对翻转。
15.按照上述技术方案,折大页组件包括两个折大页板、两个折大页座和两个折大页气缸,两个折大页座沿纵向布置于升降板上,折左大页和折右大页分别通过转动轴相对布置于两个折大页座上,两个折大页气缸分别设置于两个折大页座上,两个折大页气缸的一端分别与折左大页和折右大页连接,折大页气缸带动折左大页和折右大页绕转动轴相对翻转。
16.按照上述技术方案,所述的机器人抓手装箱机还包括控制器和机架,控制器与各部件和输送机及机器人抓手连接,各部件和输送机及机器人抓手均与机架连接,机架上设有安全防护门,安全防护门将各部件和输送机及机器人包围并防护,当所述的机器人抓手装箱机运行时安全防护门被打开,安全防护门向控制器输入信号,控制器根据信号控制所述的机器人抓手装箱机紧急停机,机架部件两侧均设有紧急停机按钮,紧急停机按钮与控制器连接。
17.本实用新型具有以下有益效果:
18.本产品实现物料(比如:袋状物、条状物、盒状物等)的自动分拣、排列和装箱,相比人工装箱,大量减少了生产操作人员和劳动强度,且安全性高,性价比高,稳定性高,工作效率高,操作简单,占地面积小,尤其适用于场地、预算有限,但又要求实现自动化,对安全及可靠性有一定要求的用户。
附图说明
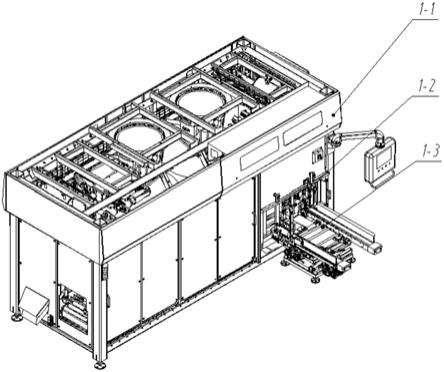
19.图1是本实用新型实施例中机器人抓手装箱机的立面示意图;
20.图2是本实用新型实施例中机器人抓手装箱机的俯视图;
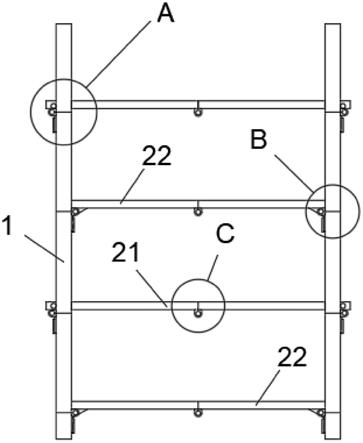
21.图3是本实用新型实施例中箱坯部件的立面示意图;
22.图4是本实用新型实施例中吸取机构的立面示意图;
23.图5是本实用新型实施例中五连杆抓手的立面图;
24.图6是本实用新型实施例中delta3机器人抓手的立面图;
25.图中,1-1-机架部件,1-2-成箱部件,1-3-箱坯部件;
26.2-1-进料输送机,2-2-摆盘输送机,2-3-delta3机器人抓手,2-4-五连杆抓手,2-5-纸箱输送部件,a表示机器进料方向,b表示机器进箱方向,c表示机器装箱输出方向;
27.3-1-左挡板,3-2-左右调节部件,3-3-顶部检测部件,3-4-右挡板,3-5-升降部件,3-6-高度调节手轮,3-7-右箱输送部件调节手轮,3-8-左箱输送部件调节手轮;
28.4-1-折大页组件,4-2-折小页组件,4-3-吸盘组件,4-4-折大页调节手轮,4-5-折小页调节手轮;
29.5-1-五连杆本体组件,5-2-第一吸盘组件;
30.6-1-delta3机器人抓手本体组件,6-2-第二吸盘组件。
具体实施方式
31.下面结合附图和实施例对本实用新型进行详细说明。
32.参照图1~图6所示,本实用新型提供的一个实施例中的机器人抓手装箱机,包括箱坯部件1-3、成箱部件1-2、纸箱输送部件2-5、排列机器人抓手、进料输送机2-1、摆盘输送机2-2和装箱机器人抓手,摆盘输送机2-2布置于进料输送机2-1一侧,进料输送机2-1的输出端设置于排列机器人抓手抓取区,排列机器人抓手布置于进料输送机2-1的输出端和摆盘输送机2-2的输入端上方,排列机器人抓手用于将散乱的物料从进料输送机2-1上抓取到摆盘输送机2-2上进行排列,纸箱输送部件2-5布置于摆盘输送机2-2的输出端一侧,装箱机器人抓手布置于摆盘输送机2-2的输出端和纸箱输送部件2-5上方,装箱机器人抓手用于将摆盘输送机2-2上的物料抓取到纸箱输送部件2-5上的纸箱内进行装箱,纸箱输送部件2-5的输入端与成箱部件1-2的输出端对接,成箱部件1-2的输入端与箱坯部件1-3的输出端对接;箱坯部件1-3用于存放箱坯,成箱部件1-2将箱坯部件1-3输送过来的箱坯打开,对箱坯底部进行折叠成型,并输送给纸箱输送部件2-5,纸箱输送部件2-5将空纸箱输送到指定位置,装箱机器人抓手将摆盘输送机2-2上的物料抓取到纸箱输送部件2-5上的纸箱内进行装箱,装好后再将装满物料的纸箱输出。
33.进一步地,所述的机器人抓手装箱机还包括机架部件1-1,箱坯部件1-3、成箱部件1-2、纸箱输送部件2-5、排列机器人、进料输送机2-1、摆盘输送机2-2和装箱机器人均与机架部件1-1连接固定。
34.进一步地,排列机器人抓手为双delta3机器人抓手2-3,装箱机器人抓手为五连杆抓手2-4。双delta3机器人抓手为两个并排布置的delta3机器人抓手,delta3机器人抓手包括delta3机器人抓手本体组件6-1和第二吸盘组件6-2,第二吸盘组件6-2设置于delta3机器人抓手本体组件6-1上,五连杆抓手2-4包括五连杆本体组件5-1和第一吸盘组件5-2,第
一吸盘组件5-2设置于五连杆本体组件5-1上,双delta3机器人可以大幅提升装箱速度;排列机器人抓手与排列机器人本体连接,排列机器人抓手上布置有机器人抓手吸盘,机器人抓手吸盘方便更换规格,可适用于多种不同规格的物料。
35.进一步地,箱坯部件1-3包括箱坯成型阻挡装置、箱坯输送部件和固定机架,箱坯输送部件设置于固定机架上,箱坯成型阻挡装置设置于箱坯输送部件的输出端,箱坯输送部件的两侧设有挡板,分别为左挡板3-1和右挡板3-4;箱坯放置于箱坯输送部件上,挡板从两侧对箱坯进行限位,箱坯成型阻挡装置对箱坯输送部件上的箱坯进行定位并防止箱坯超出箱坯输送部件及掉落。
36.进一步地,箱坯输送部件的个数为两个,两个箱坯输送部件平行并排布置,分别为左箱输送部件和右箱输送部件,两个箱坯输送部件和固定机架之间均连接有左右调节部件3-2。
37.左右调节部件3-2包括调节手轮、丝杆和导杆,丝杆两端通过轴承与固定机架连接,调节手轮与丝杆的一端连接,丝杆上套设有螺母,螺母与箱坯输送部件连接,导杆与丝杆平行布置,两个箱坯输送部件通过滑块套设于导杆上,调节手轮驱动丝杆转动,从而带动箱坯输送部件沿导杆来回移动;与左箱输送部件连接的左右调节部件3-2连接有左箱输送部件调节手轮3-8,与右箱输送部件连接的左右调节部件3-2连接有右箱输送部件调节手轮3-7。
38.进一步地,箱坯输送部件包括直线导轨、箱坯推动块、箱坯气缸和输送带,输送带通过两个输送带轮布置于固定机架上,直线导轨布置于输送带的一侧,箱坯推动块设置于直线导轨上,并与输送带连接,箱坯气缸固设于固定机架上,箱坯气缸的一端与输送带连接,箱坯气缸带动同步带来回运转,输送带带动箱坯推动块沿直线导轨来回移动;箱坯放置于输送带上,箱坯推动块从后方对输送带上的箱坯进行限位。
39.进一步地,箱坯输送部件的上方设有顶部检测部件3-3,箱坯输送部件底部设有升降部件3-5,升降部件3-5连接有高度调节手轮3-6,高度调节手轮3-6通过升降部件3-5调节箱坯输送部件的高度。
40.进一步地,输送带两侧设有护栏,输送箱坯时,箱坯大页在护栏间隙移动,防止箱坯大页闭合影响装箱。护栏高度便于调整,可以适用各种规格的箱坯。
41.进一步地,成箱部件1-2包括上部机架、吸取机构和成型机构,吸取机构设置于上部机架上,成型机构设置于吸取机构的下端;
42.吸取机构包括直线移动单元和吸取支架,上部机架上设有横向直线导轨,吸取支架设置于横向直线导轨上,直线移动单元与吸取支架连接,直线移动单元带动吸取支架沿横向直线导轨前后移动,吸取支架上设有吸盘组件,用于吸取纸箱坯的箱面;
43.成型机构包括升降驱动件、升降板、折小页组件4-2和折大页组件4-1,升降驱动件设置于吸取支架上,升降驱动件与升降板连接,带动升降板上下移动,折小页组件4-2和折大页组件4-1均设置于升降板上。
44.进一步地,升降驱动件为折页升降气缸,折页升降气缸的活塞杆与升降板连接。
45.进一步地,直线移动单元包括第一电机和两个同步带轮,两个同步带轮分布于上部机架上,两个同步带轮之间通过同步带连接,其中一个同步带轮与第一电机连接,同步带与吸取支架连接,第一电机通过同步带轮及同步带带动吸取支架沿横向直线导轨前后移
动。
46.进一步地,吸取机构还包括连杆,吸取支架包括长边吸取支架和短边吸取支架,长边吸取支架的上端设置于横向直线导轨上,短边吸取支架的一侧通过转轴与长边吸取支架的一侧铰接,短边吸取支架的另一侧与连杆的一端铰接,连杆的另一端与上部机架铰接,短边吸取支架随长边吸取支架沿横向直线导轨来回移动过程中,连杆带动短边吸取支架绕转轴转动,使短边吸取支架与长边吸取支架在呈直线分布状态和相互垂直的状态之间转变,长边吸取支架和短边吸取支架上均分布有吸取吸盘。
47.进一步地,折小页组件4-2包括两个折小页板和两个小页支架,两个小页支架沿水平横向布置于升降板上,两个折小页板分别相对布置于两个小页支架上,两个折小页板的外端分别与两个小页支架铰接,两个小页支架上均设有折小页气缸,两个折小页气缸的一端分别与两个折小页板的底部铰接,两个折小页气缸带动两个折小页板绕相应铰接点相对翻转。
48.进一步地,折小页组件4-2还包括第一调整机构,两个折小页板分别为折前小页板和折后小页板,第一调整机构设置于升降板上,两个小页支架沿水平横向布置于第一调整机构上,第一调整机构用于调整两个小页支架之间的距离,折前小页板和折后小页板分别相对布置于两个小页支架上,折前小页板和折后小页板的外端分别与两个小页支架铰接,两个小页支架上均设有折小页气缸,两个折小页气缸的一端分别与折前小页板和折后小页板的底部铰接,折小页气缸带动折前小页板和折后小页板绕相应铰接点相对翻转。
49.进一步地,折大页组件4-1包括两个折大页板、两个折大页座和两个折大页气缸,两个折大页座沿纵向布置于升降板上,折左大页和折右大页分别通过转动轴相对布置于两个折大页座上,两个折大页气缸分别设置于两个折大页座上,两个折大页气缸的一端分别与折左大页和折右大页连接,折大页气缸带动折左大页和折右大页绕转动轴相对翻转。
50.进一步地,折大页组件4-1还包括第二调整机构,两个折大页板分别为折左大页和折右大页,第二调整机构设置于升降板上,两个折大页座沿纵向布置于第二调整机构上,第二调整机构用于调整两个折大页座之间的距离,折左大页和折右大页分别通过转动轴相对布置于两个折大页座上,两个折大页气缸分别设置于两个折大页座上,两个折大页气缸的一端分别与折左大页和折右大页连接,折大页气缸带动折左大页和折右大页绕转动轴相对翻转;折左大页和折右大页上沿长度方向均设有缝隙。
51.进一步地,第一调整机构包括页板调整手轮、固定板、丝杆和导杆,丝杆两端通过轴承与固定板连接,固定板固设于升降板上,页板调整手轮与丝杆的一端连接,丝杆上套设有两个螺母,两个螺母分别与两个小页支架连接,导杆与丝杆平行布置,螺母套设于导杆上,页板调整手轮驱动丝杆转动,从而带动两个小页支架沿导杆相向移动;第二调整机构与第一调整机构结构相同,区别仅在于两个螺母分别与两个折大页座连接,其中第一调整机构中的页板调整手轮为折小页调节手轮4-5,第二调整机构中的页板调整手轮为折大页调节手轮4-4。
52.吸取支架上竖直设有升降直线导轨,升降板设置于升降直线导轨上,可沿升降直线导轨上下移动。
53.进一步地,所述的机器人抓手装箱机还包括控制器和机架,控制器与各部件和输送机及机器人抓手连接,各部件和输送机及机器人抓手均与机架连接,机架上设有安全防
护门,安全防护门将各部件和输送机及机器人包围并防护,当所述的机器人抓手装箱机运行时安全防护门被打开,安全防护门向控制器输入信号,控制器根据信号控制所述的机器人抓手装箱机紧急停机,机架部件1-1两侧均设有紧急停机按钮,紧急停机按钮与控制器连接,提高设备的安全性能。
54.以上的仅为本实用新型的较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型申请专利范围所作的等效变化,仍属本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。