技术特征:
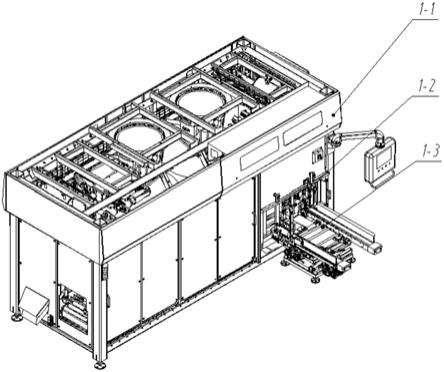
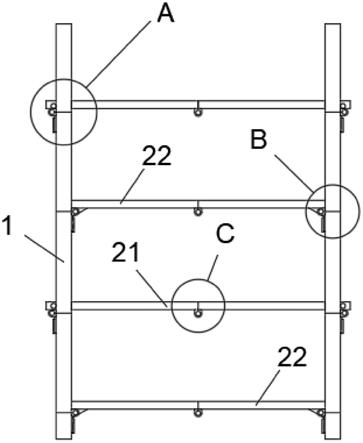
1.一种机器人抓手装箱机,其特征在于,包括箱坯部件、成箱部件、纸箱输送部件、排列机器人抓手、进料输送机、摆盘输送机和装箱机器人抓手,摆盘输送机布置于进料输送机一侧,排列机器人抓手布置于进料输送机的输出端和摆盘输送机的输入端上方,排列机器人抓手用于将散乱的物料从进料输送机上抓取到摆盘输送机上进行排列,纸箱输送部件布置于摆盘输送机的输出端一侧,装箱机器人抓手布置于摆盘输送机的输出端和纸箱输送部件上方,装箱机器人抓手用于将摆盘输送机上的物料抓取到纸箱输送部件上的纸箱内进行装箱,纸箱输送部件的输入端与成箱部件的输出端对接,成箱部件的输入端与箱坯部件的输出端对接。2.根据权利要求1所述的机器人抓手装箱机,其特征在于,排列机器人抓手为双delta3机器人抓手,装箱机器人抓手为五连杆抓手。3.根据权利要求1所述的机器人抓手装箱机,其特征在于,箱坯部件包括箱坯成型阻挡装置、箱坯输送部件和固定机架,箱坯输送部件设置于固定机架上,箱坯成型阻挡装置设置于箱坯输送部件的输出端,箱坯输送部件的两侧设有挡板;箱坯放置于箱坯输送部件上,挡板从两侧对箱坯进行限位,箱坯成型阻挡装置对箱坯输送部件上的箱坯进行定位并防止箱坯超出箱坯输送部件及掉落。4.根据权利要求3所述的机器人抓手装箱机,其特征在于,箱坯输送部件包括直线导轨、箱坯推动块、箱坯气缸和输送带,输送带通过两个输送带轮布置于固定机架上,直线导轨布置于输送带的一侧,箱坯推动块设置于直线导轨上,并与输送带连接,箱坯气缸固设于固定机架上,箱坯气缸的一端与输送带连接,箱坯气缸带动同步带来回运转,输送带带动箱坯推动块沿直线导轨来回移动;箱坯放置于输送带上,箱坯推动块从后方对输送带上的箱坯进行限位。5.根据权利要求1所述的机器人抓手装箱机,其特征在于,成箱部件包括上部机架、吸取机构和成型机构,吸取机构设置于上部机架上,成型机构设置于吸取机构的下端;吸取机构包括直线移动单元和吸取支架,上部机架上设有横向直线导轨,吸取支架设置于横向直线导轨上,直线移动单元与吸取支架连接,直线移动单元带动吸取支架沿横向直线导轨前后移动,吸取支架上设有吸盘组件,用于吸取纸箱坯的箱面;成型机构包括升降驱动件、升降板、折小页组件和折大页组件,升降驱动件设置于吸取支架上,升降驱动件与升降板连接,带动升降板上下移动,折小页组件和折大页组件均设置于升降板上。6.根据权利要求5所述的机器人抓手装箱机,其特征在于,直线移动单元包括第一电机和两个同步带轮,两个同步带轮分布于上部机架上,两个同步带轮之间通过同步带连接,其中一个同步带轮与第一电机连接,同步带与吸取支架连接,第一电机通过同步带轮及同步带带动吸取支架沿横向直线导轨前后移动。7.根据权利要求5所述的机器人抓手装箱机,其特征在于,吸取机构还包括连杆,吸取支架包括长边吸取支架和短边吸取支架,长边吸取支架的上端设置于横向直线导轨上,短边吸取支架的一侧通过转轴与长边吸取支架的一侧铰接,短边吸取支架的另一侧与连杆的一端铰接,连杆的另一端与上部机架铰接,短边吸取支架随长边吸取支架沿横向直线导轨来回移动过程中,连杆带动短边吸取支架绕转轴转动,使短边吸取支架与长边吸取支架在呈直线分布状态和相互垂直的状态之间转变,长边吸取支架和短边吸取支架上均分布有吸
取吸盘。8.根据权利要求5所述的机器人抓手装箱机,其特征在于,折小页组件包括两个折小页板和两个小页支架,两个小页支架沿水平横向布置于升降板上,两个折小页板分别相对布置于两个小页支架上,两个折小页板的外端分别与两个小页支架铰接,两个小页支架上均设有折小页气缸,两个折小页气缸的一端分别与两个折小页板的底部铰接,两个折小页气缸带动两个折小页板绕相应铰接点相对翻转。9.根据权利要求5所述的机器人抓手装箱机,其特征在于,折大页组件包括两个折大页板、两个折大页座和两个折大页气缸,两个折大页座沿纵向布置于升降板上,折左大页和折右大页分别通过转动轴相对布置于两个折大页座上,两个折大页气缸分别设置于两个折大页座上,两个折大页气缸的一端分别与折左大页和折右大页连接,折大页气缸带动折左大页和折右大页绕转动轴相对翻转。10.根据权利要求1所述的机器人抓手装箱机,其特征在于,所述的机器人抓手装箱机还包括控制器和机架,控制器与各部件和输送机及机器人抓手连接,各部件和输送机及机器人抓手均与机架连接,机架上设有安全防护门,安全防护门将各部件和输送机及机器人包围并防护,当所述的机器人抓手装箱机运行时安全防护门被打开,安全防护门向控制器输入信号,控制器根据信号控制所述的机器人抓手装箱机紧急停机,机架部件两侧均设有紧急停机按钮,紧急停机按钮与控制器连接。
技术总结
本实用新型公开了一种机器人抓手装箱机,包括箱坯部件、成箱部件、纸箱输送部件、排列机器人抓手、进料输送机、摆盘输送机和装箱机器人抓手,排列机器人抓手布置于进料输送机的输出端和摆盘输送机的输入端上方,排列机器人抓手用于将散乱的物料从进料输送机上抓取到摆盘输送机上进行排列,装箱机器人抓手布置于摆盘输送机的输出端和纸箱输送部件上方,装箱机器人抓手用于将摆盘输送机上的物料抓取到纸箱输送部件上的纸箱内进行装箱,纸箱输送部件的输入端与成箱部件的输出端对接,成箱部件的输入端与箱坯部件的输出端对接。实现物料自动分拣、排列和装箱,减少操作人员和劳动强度,安全性和稳定性高,性价比高,工作效率高,操作简单,占地小。占地小。占地小。
技术研发人员:赵伟 程亮 田彬 刘迎主
受保护的技术使用者:武汉人天包装自动化技术股份有限公司
技术研发日:2021.10.18
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。