1.本实用新型涉及机械吊运技术领域,尤其涉及一种新型提升机。
背景技术:
2.常规的在使用所述智能提升机通过所述钢丝绳起吊所述卸扣时,由于所述智能提升机的最大提升功率是有限的,在搬运过重的工件时,容易超出其额定使用范围,但是实际操作人员可能不能准确估计其工件的实际重量,从而在搬运的过程中,容易出现损坏智能提升机或者工件在搬运过程中,坠落砸伤操作人员;另外在使用吊运架对工件进行吊运时,具体使用调节伸缩缸再调节气缸夹紧臂对工件进行搬运;由于工件本身重量不大且结构硬度不够强,对所述气缸夹紧臂施加过大的压力,容易使得工件变形。
技术实现要素:
3.本实用新型的目的是提供一种新型提升机,解决常规提升机使用时存在的上述问题。
4.为解决上述技术问题,本实用新型采用如下技术方案:
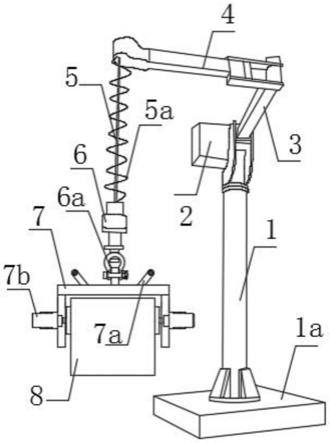
5.本实用新型提供了一种新型提升机,包括旋转立柱、设置在所述旋转立柱顶部的智能提升机和主旋转臂、可水平旋转地设置在所述主旋转臂上的副旋转臂;
6.在所述副旋转臂上通过钢丝绳设置有控制手柄和卸扣,在所述卸扣的下方悬吊有吊运架;在所述卸扣上设置有重力传感器;
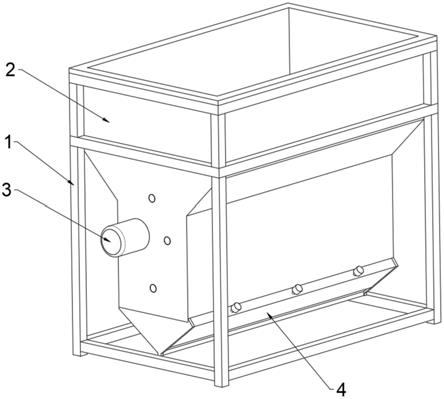
7.所述吊运架为倒u形架,在其顶部安装有把手,在其侧壁上对称安装有调节伸缩缸,其中所述调节伸缩缸的伸缩端延伸至所述吊运架的内部,并在所述吊运架的内部设置有用于固定工件的气缸夹紧臂。
8.本实施例中,进一步地优化,所述旋转立柱的下端设置有底座。
9.本实施例中,再进一步地优化,所述钢丝绳的外周壁绕设有连接所述智能提升机的螺旋导线。
10.本实施例中,再进一步地优化,所述重力传感器通过无限信号传输设备连接控制器,其中所述控制器分别连接有报警器和调节伸缩缸。
11.本实施例中,再进一步地优化,在所述吊运架的顶部对称安装有两个把手。
12.本实施例中,再进一步地优化,所述调节伸缩缸为电动伸缩缸,其导线与所述螺旋导线为同一线束。
13.本实施例中,再进一步地优化,两个所述气缸夹紧臂对称限位在所述吊运架内,并通过所述调节伸缩缸调节两个所述气缸夹紧臂之间间距,以对所述工件进行夹紧限位。
14.与现有技术相比,本实用新型的有益技术效果:本技术中在提升机吊运的卸扣下方悬吊有吊运架,并在所述卸扣上安装有重力传感器,其中所述重力传感器通过无限信号传输设备连接控制器,其中所述控制器分别连接有报警器和调节伸缩缸;一方面,便于对工件重量进行测定评估,避免工件过中超出提升机的使用范围而误伤操作人员;另外还可以
通过工件重量的需求,从而调整所述调节伸缩缸对气缸夹紧臂的压紧力,避免气缸夹紧臂的压力过大损坏工件。
附图说明
15.下面结合附图说明对本实用新型作进一步说明。
16.图1为本实用新型新型提升机的主体示意图;
17.图2为本实用新型新型提升机的吊运架结构示意图;
18.图3为本实用新型新型提升机的控制流程示意图。
19.附图标记说明:
20.1、旋转立柱;1a、底座;2、智能提升机;3、主旋转臂;4、副旋转臂;5、钢丝绳;5a、螺旋导线;6、控制手柄;6a、卸扣;6b、重力传感器;7、吊运架;7a、把手;7b、调节伸缩缸;7c、气缸夹紧臂;8、工件。
具体实施方式
21.本实施例中公开了一种新型提升机,包括旋转立柱1、安装在所述旋转立柱1顶部的智能提升机2和主旋转臂3、可水平旋转地安装在所述主旋转臂3上的副旋转臂4;
22.如图1所示,本实施例中具体地,所述旋转立柱1的下端固定安装在所述底座1a上,在所述底座1a的顶部安装有转动架,在所述转动架上安装有智能提升机2,本实施例中,所述智能提升机2为折臂式智能提升设备;其中智能提升机2的输出端安装有主旋转臂3,在所述主旋转臂3上安装有副旋转臂4;
23.本实施例中,所述智能提升机2通过钢丝绳5并绕过副旋转臂4的端部连接有卸扣6a,并在所述卸扣6a上方安装有控制手柄6,所述钢丝绳5的外周壁绕设有连接所述智能提升机2的螺旋导线5a;
24.其中所述控制手柄6通过螺旋导线5a连接智能提升机2,即通过所述控制手柄6调节控制所述智能提升机2。
25.如图2所示,本实施例中,在所述卸扣6a的下方悬吊有吊运架7;在所述卸扣6a上安装有重力传感器6b;所述重力传感器6b通过无限信号传输设备连接控制器,其中所述控制器分别连接有报警器和调节伸缩缸7b;
26.常规的在使用所述智能提升机2通过所述钢丝绳5起吊所述卸扣6a时,由于所述智能提升机2的最大提升功率是有限的,在搬运过重的工件时,容易超出其额定使用范围,但是实际操作人员可能不能准确估计其工件的实际重量,从而在搬运的过程中,容易出现损坏智能提升机2或者工件在搬运过程中,坠落砸伤操作人员;
27.基于解决上述技术问题,本技术中,通过利用在所述卸扣6a上,具体地在所述卸扣6a的受力面上安装所述重力传感器6b;
28.具体地,如图3所示,所述重力传感器6b通过a/d转换器,将其检测数据信号通过无限发射仪表发送给单片机,再通过单片机分析,重力传感器检测数据是否超重,从而根据需求设定驱动报警器,提升操作人员安全吊运。
29.如图2所示,本实施例中,所述吊运架7为倒u形架,在其顶部安装有把手7a,在其侧壁上对称安装有调节伸缩缸7b,其中所述调节伸缩缸7b的伸缩端延伸至所述吊运架7的内
部,并在所述吊运架7的内部安装有用于固定工件8的气缸夹紧臂7c;在所述吊运架7的顶部对称安装有两个把手7a,便于手持调节;所述调节伸缩缸7b为电动伸缩缸,其导线与所述螺旋导线5a为同一线束,防止乱绳;
30.其中本实施例中,在使用吊运架7对工件进行吊运时,具体使用调节伸缩缸7b再调节气缸夹紧臂7c对工件8进行搬运;由于工件(例如箱体)本身重量不大且结构硬度不够强,对所述气缸夹紧臂7c施加过大的压力,容易使得工件变形;
31.本实施例中,利用两个所述气缸夹紧臂7c对称限位在所述吊运架7内,并通过所述调节伸缩缸7b调节两个所述气缸夹紧臂7c之间的间距,以对所述工件8进行夹紧限位;其中所述重力传感器6b通过a/d转换器,将其检测数据信号通过无限发射仪表发送给单片机,再通过单片机分析,重力传感器检测数据范围,从而根据设定调节所述调节伸缩缸7b使得气缸夹紧臂7c对所述工件8施加合理的设定压力。
32.在本发明创造的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.以上实施例仅是对本发明创造的优选方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案做出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。