1.本公开涉及工具的领域并且具体地涉及在汽车行业中使用的工具。
背景技术:
2.在汽车行业中各种各样的夹子被用于各种不同应用中。例如,夹子被用于固定电线、线缆、软管和管。夹子也被用于将挡泥板、面板、饰件、隔热材料和支架固定到其他的车辆部件。在许多应用中,夹子不暴露于很大负载。因此,夹子有利地由轻质材料制成。各种形式的塑料通常被用于一些夹子。塑料夹子有利地是便宜且轻质的。
3.由于应用广泛,夹子采取大量不同形式。在一些情况下,使用单向夹子。“单向”夹子通常是扩展或以某种其他方式卡在下面的基底上以便提供半永久连接的装置。一种类型的单向夹子被提供成两个部件。一个部件用作基部或保持器并且通常被附接到下面的基底。第二部件被螺纹连接或卡到第一部件中。第二部件通常包括可以是径向弹性的杆和头部。
4.另一个夹子的形式是具有茎和低轮廓头部的单个部件。在这种类型的夹子中,杆的大小被设计成卡到基底中的孔中并且头部被构造成径向向外延伸以便防止头部到孔中的运动。
5.不同于诸如螺钉、螺栓和类似物的紧固件,夹子不易被移除。而是,它们本质上是半永久的,因为使用夹子被紧固在一起的部件旨在很少被分离。附加地,因为夹子能够简单地使用直接力而被容易地插入就位,所以在相对难以接近的区域中,它们比螺钉或螺栓更便于使用。
6.当需要移除夹子时,夹子提供的许多好处变成了缺点。具体地,夹子能够位于难以到达和小余隙区域。头部的低轮廓使得非常难以抓握头部以进行移除。因为夹子由轻质材料制成,所以很容易损坏夹子从而使得移除甚至更困难。例如,当夹子的头部被破坏时,用于通过杠杆作用在头部上来移除夹子的工具将变得无用。最后,由于夹子能够采用的形状和大小各种各样,因此难以维持每种不同类型和大小的夹子的库存。因此,必须小心地将移除期间损坏的夹子数量降至最低。
7.因此,被设计成在不损坏夹子的情况下移除多种类型的夹子的工具将是有益的。将进一步有益的是工具能够移除甚至已经损坏的夹子。
技术实现要素:
8.根据本公开的示例性实施例,也被称为塑料夹子按扣钳子的钳子包括第一手柄和第二手柄。相应钳爪被固定地附接到每个手柄并且手柄被枢轴可枢转地连接。每个钳爪均包括齿、锥形部分和刃部分,他们在手柄处于闭合位置中时彼此对准。
9.在一个或更多个实施例中,刃部分的内边缘位于钳爪的底部上方比齿和锥形部分的内边缘更高处。
10.在一个或更多个实施例中当第一手柄和第二手柄处于闭合位置中时,所述两个锥
形部分在其之间限定开口。在使用钳子移除夹子时这有助于减少完全切断夹子的杆的可能性。
11.在一个或更多个实施例中当第一手柄和第二手柄闭合时,齿邻接。
12.在一个或更多个实施例中锥形部分被定位在齿和刃部分之间且刃部分最靠近手柄。
13.在一个或更多个实施例中相应齿槽位于每个齿和相应锥形部分之间。
14.在一个或更多个实施例中手柄中的一个包括肩部并且锁被可枢转地附接到另一手柄。锁被构造成当所述两个手柄处于闭合位置中时选择性邻接肩部以致手柄被锁定在闭合位置中。
15.在一个或更多个实施例中弹簧位于手柄之间并且被构造成偏压手柄远离闭合位置。
16.在一个或更多个实施例中钳爪通过成角度部分被连接到手柄。成角度部分被设计成使得,随着手柄绕枢轴枢转,手柄平行于第一平面运动,同时随着手柄绕枢轴枢转,钳爪的至少一部分不平行于所述平面移动。
17.根据一个实施例,使用钳子的方法包括提供具有可枢转地连接两个手柄的枢轴的钳子,所述手柄相对于相应钳爪处于固定位置中。钳子被设计成使得当手柄处于闭合位置中时,一个钳爪的齿对准于另一钳爪的齿。同样地,一个钳爪的锥形部分对准于另一钳爪的锥形部分,且一个钳爪的刃部分对准于另一钳爪的刃部分。方法包括将齿或锥形部分对准于夹子并且使得所述两个手柄中的至少一个朝向所述两个手柄中的另一个移动。齿或锥形部分因此在夹子的头部下方运动并且被用于向夹子的头部施加力。在向头部施加力导致损坏头部的情况下,该方法前进到使得刃部分对准于夹子的杆并且使得所述两个手柄中的至少一个朝向所述两个手柄中的另一个移动。刃部分之后被用于向杆的头部施加力。
18.根据一个或更多个实施例,将齿或锥形部分对准包括将齿或锥形部分的内边缘在其中定位有夹子的表面上方的第一高度处对准于夹子,并且将刃部分对准包括将刃部分的内边缘在所述表面上方高于第一高度的第二高度处对准于杆。
19.根据一个或更多个实施例将齿或锥形部分对准包括将钳子定位在刃部分位于手柄和齿或锥形部分之间的位置处。
20.根据一个或更多个实施例,方法包括,在将齿或锥形部分对准于夹子之前,将被可枢转地附接到一个手柄的锁从第一位置枢转到第二位置,在第一位置处锁邻接另一手柄的肩部,从而锁定第二手柄的相对位置,在所述第二位置处所述锁不邻接肩部。
21.根据一个或更多个实施例,方法包括,在使用齿或锥形部分向夹子的头部施加力之后且在将刃部分对准于杆之前,使用弹簧偏压手柄远离彼此。
附图说明
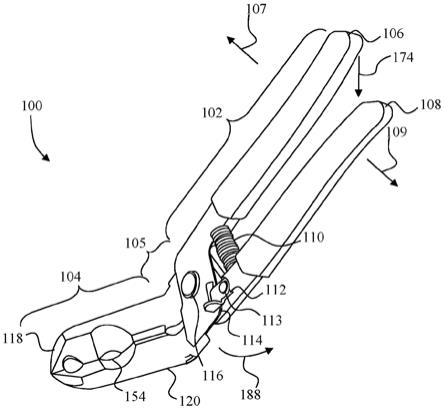
22.通过参考以下详细描述和附图,上述特征和优点以及其他特征和优点对于本领域普通技术人员来说将变得易于理解,在附图中:图1是塑料夹子按扣钳子的立体图;图2是塑料夹子按扣钳子的左侧视图;图3是塑料夹子按扣钳子的右侧视图;
图4是塑料夹子按扣钳子的前立面视图;图5是塑料夹子按扣钳子的后立面视图;图6是塑料夹子按扣钳子的俯视平面图;图7是塑料夹子按扣钳子的仰视平面图。图8是图1的塑料夹子按扣钳子的钳爪中的一个的侧立体图;图9是图1的塑料夹子按扣钳子的钳爪中的一个的顶部立体图;图10是能够通过使用图1的塑料夹子按扣钳子被移除的夹子的立体图;图11是与图10的夹子接合的图1的塑料夹子按扣钳子的齿的立体图;图12是与图10的夹子接合的图1的塑料夹子按扣钳子的锥形部分的立体图;图13是能够使用图1的塑料夹子按扣钳子被移除的夹子的立体图;图14是与图13的夹子接合的图1的塑料夹子按扣钳子的锥形部分的立体图;以及图15是与图13的夹子接合的杆的图1的塑料夹子按扣钳子的刃部分的立体图。
具体实施方式
23.为了促进对本公开的原理的理解,现在将参考附图中图示的和以下书面说明中所述的实施例。应当理解,不意图藉此限制本公开的范围。还应当理解,本公开包括对所图示的实施例的任何改变和修改,且包括本公开所属领域的技术人员通常能想到的本公开的原理的另外应用。
24.在所附描述中公开了本公开的各方面。在不背离本公开的精神或范围的情况下可以想到本公开的替代性实施例及其等价物。应该注意,在本文中关于“一种实施例”、“一个实施例”、“一个示例性实施例”和类似物的任意讨论指示所述实施例可以包括具体特征、结构或者特性,且这样的具体特征、结构或者特性不一定被包括在每个实施例中。此外,对前述内容的引用不一定包括对同一实施例的引用。最后,无论是否明确描述,本领域的一个普通技术人员将容易理解,给定实施例的每个具体特征、结构或特性可以与本文中讨论的任何其他实施例的特征、结构或特性结合或组合地被使用。
25.如图1-7中所示,塑料夹子按扣钳子100包括手柄区段102和钳爪区段104。过渡区域105联结钳爪区段104和手柄区段102。手柄区段102包括两个手柄106和108。弹簧110被定位在过渡区域105中并且被构造成偏压两个手柄106和108彼此远离。具体地,在箭头107的方向上偏压手柄106,同时在箭头109的方向上偏压手柄108。锁112被枢轴113可枢转地附接到手柄108并且被构造成当处于如图1中所描绘的锁定位置中时邻接手柄106的肩部114。手柄106和108被枢轴螺栓116连接到彼此。虽然弹簧110和手柄106和108在图1中被描绘为一种形式,不过在其他实施例中弹簧110和手柄106和108被不同地成形且/或被不同地定位。
26.钳爪区段104包括两个钳爪118和120。如图8中所示,钳爪118包括在钳爪118的远端处的齿122、齿槽124、锥形部分126和刃部分128。齿122和锥形部分126均渐缩到钳爪118的底部处的相应内边缘123/127。刃部分128渐缩到内边缘129,该内边缘129位于比齿122和锥形部分126的内边缘123/127更高的位置处,如图8中最佳所示。在钳爪118的近端处的成角度部分130将钳爪118连接到手柄108。钳爪118的远端渐缩到齿122处的点132。虽然钳爪118和成角度部分130在图1中被描绘为一种形式,不过在其他实施例中钳爪118和成角度部分130被不同地成形。而且,在一些实施例中省略了成角度部分130。
27.图9中所示的钳爪120包括在钳爪120的远端处的齿142、齿槽144、锥形部分146和刃部分148。齿142和锥形部分146均渐缩到钳爪120的底部处的相应内边缘143/147。刃部分148渐缩到内边缘149,该内边缘149位于比齿142和锥形部分146的内边缘143/147更高的位置处。在钳爪120的近端处的成角度部分150将钳爪120连接到手柄106。钳爪120的远端渐缩到齿142处的点152。虽然钳爪120和成角度部分150在图1中被描绘为一种形式,不过在其他实施例中钳爪120和成角度部分150被不同地成形。而且,在一些实施例中省略了成角度部分130。
28.在图1的实施例中,钳爪118在过渡区域105中与手柄108一体形成,并且钳爪120在过渡区域105中与手柄106一体形成。在其它实施例中,手柄和钳爪被单独形成。枢轴螺栓紧固钳爪118/手柄108和钳爪120/手柄106,以致当塑料夹子按扣钳子100处于如图1中所示的“闭合”位置中时,齿122和142被彼此直接相对地对准。同样地,锥形部分126和146被彼此直接相对地对。刃部分128和148至少部分对准且至少部分彼此直接相对地对准。
29.钳爪118和钳爪120在一个实施例中被构造成使得齿122和142、锥形部分126和146以及刃部分128和148产生当钳子闭合时限制手柄106和108朝向彼此运动的接触点。在一些实施例中,齿122和142、锥形部分126和146以及刃部分128和148中的一个或更多个在阻止手柄106和108朝向彼此运动的构造处彼此不接触。例如,在一些实施例中,接触点被弹簧110(当被完全压缩时)提供在成角度部分130和150中,少于所有齿122和142、锥形部分126和146以及刃部分128和148或者在手柄或钳爪上的在齿122和142、锥形部分126和146以及刃部分128和148中的一个或更多个之间存在间隙时阻止手柄106和108朝向彼此的进一步运动的其他类型的接触构件。
30.在图1的实施例中,锥形部分126和146被构造成使得当塑料夹子按扣钳子完全闭合(手柄106和107被定位成尽可能接近彼此)时,由锥形部分126和146形成开口154。开口154防止无意中将夹子切成两件。
31.塑料夹子按扣钳子100被用于移除夹子,诸如图10中所示的夹子160。夹子160包括基部162和销164。通过推动销164的头部166从而将销164的杆168推到基部162中来锁定夹子160。杆168迫使基部的足部170扩张,从而将夹子锁定在基底中,如本领域已知的。基部162包括槽172,其被塑料夹子按扣钳子100用来移除销164,如进一步参考图1和图11解释的。
32.具体地,齿122和142的大小被设计成配合在槽172内。因此,为了在塑料夹子按扣钳子100处于图1的条件下开始解锁夹子160,锁112绕枢轴113在箭头188的方向上从图1的锁定位置枢转到解锁位置,在该解锁位置处锁112不接触肩部114以便阻止运动。弹簧110之后操作成通过在图1的箭头107和109的方向上推动手柄106和108来打开钳爪118和120。这允许一只手操作塑料夹子按扣钳子100。
33.一旦塑料夹子按扣钳子100被解锁,操作者将齿122和142对准于槽172并且挤压手柄106和108。挤压手柄106和108迫使手柄压缩弹簧110,从而朝向手柄106移动手柄108且/或朝向手柄108移动手柄106。随着手柄移动,钳爪118和120以对应方式绕枢轴螺栓116运动,直到齿122和142接触头部166,如图中11中所示。操作者以上述方式对弹簧110的进一步压缩迫使齿122和142在头部166下方滑动,从而在从基部162向外的方向上推动销164。齿槽124和齿槽144的渐缩部被设计成随着操作者继续朝向彼此移动手柄106和108,允许齿122
和142在头部166下方运动并且接触杆168而钳爪118和120不会接触夹子160。
34.一旦齿118和120被定位在头部166下方达期望程度,通常齿118和120触及杆168,则操作者在图1中箭头174的方向上推动手柄106和108。这个运动将钳爪118和120推抵于邻近于基部162的表面,并且成角度部分130和150被用作支点以向外基部162的外部推动销164。附加地和/或替代性地,钳爪118和钳爪120被用作左右运动的支点,且/或手柄被简单地向上拉动以向外基部162的外部推动销164。
35.在一些情况下,仅使用齿122和142提升销164离开基部162。在其它情况下,在从基部162部分撤出销164之后,操作者使得塑料夹子按扣钳子移位,以致锥形部分126和146如图12中所示在头部166之下以完成销164的撤出。
36.塑料夹子按扣钳子100也被用于移除夹子,诸如图13中所示的夹子180。夹子180包括头部182和杆184。在杆184上提供多个弹性脊186。通过在杆184对准于基底中的开口的情况下推动夹子180的头部182从而将杆184推入到孔中来锁定夹子180。杆184和弹性构件186的大小被设计成使得随着头部182被压向开口从而允许杆184和弹性构件186进入开口中,弹性构件186变形。一旦在开口所处的基底内/下方,则弹性构件186恢复到它们的原始形状,从而将夹子180锁定到基底。
37.虽然可以使用塑料夹子按扣钳子100的齿122和142来从基底移除夹子180,不过通常使用锥形部分126和146。在这样的实施例中移除夹子包括在钳爪118和120中的至少一个正搁置在基底上的同时将锥形部分126和146的限定开口154的部分对准于夹子180的杆184。此时,或者在较早的时间,锁112围绕枢轴113在箭头188的方向上从图1的锁定位置枢转到解锁位置,在该解锁位置处锁112不接触肩部114以阻止运动。之后紧靠夹子180的头部182放置锥形部分126/146中的一个。之后操作者挤压手柄106和108。挤压手柄106和108迫使手柄压缩弹簧110,从而朝向手柄106移动手柄108且/或朝向手柄108移动手柄106。
38.随着手柄移动,钳爪118和120以对应方式绕枢轴螺栓116运动,直到两个锥形部分126和146接触头部182。锥形部分126和146的渐缩部被设计成使得随着操作者继续朝向彼此移动手柄106和108,锥形部分126和146的底部边缘在头部182的底部和所述表面之间移动。
39.一旦齿118和120被定位在头部166下方达期望程度(例如见图14),则操作者在图1中箭头174的方向上推动手柄106和108。这个运动将钳爪118和120推抵于邻近于头部182的表面,并且成角度部分130和150被用作支点以向所述表面的外部推动杆184。附加地和/或替代性地,钳爪118和钳爪120被用作左右运动的支点,且/或手柄106和108被简单地向上拉动以将杆184向基底中的开口的外部推动。因为锥形部分126和146被居中定位在钳爪118和120上,所以齿122和132也附加地/替代性地用作支点。
40.在夹子的头部(诸如在图10中的夹子160的头部166或者在图13中的夹子180的头部182)被损坏的情况下,刃部分128和148被用于移除被损坏的夹子。移除被损坏的夹子包括将刃部分128和148对准于夹子的杆。因为刃部分128和148的边缘位于比齿122/142和锥形部分126/146的边缘更高处,所以远侧齿122/142或者成角度部分130/150通常位于邻近于被损坏的夹子的表面上,并且塑料夹子按扣钳子100绕接触点向后(即,当远侧齿提供支点时)或者向前(即当成角度部分提供支点时)枢转直到被损坏的夹子的杆位于刃部分128和148之间。此时,或者在较早的时间,锁112围绕枢轴113在箭头188的方向上从图1的锁定
位置枢转到解锁位置,在该解锁位置处锁112不接触肩部114以便阻止运动。
41.之后操作者挤压手柄106和108。挤压手柄106和108迫使手柄压缩弹簧110,从而朝向手柄106移动手柄108且/或朝向手柄108移动手柄106。随着手柄移动,钳爪118和120以对应方式绕枢轴螺栓116运动,直到两个刃部分128和148被损坏的夹子的杆。因为刃部分128和148的渐缩边缘高于齿122/142和锥形部分126/146的边缘,所以刃部分128和148对准于杆而不是被损坏的头部。附加地,头部不干扰使用刃部分128和148获得在杆上的良好抓握。
42.一旦刃部分128和148与杆接合达期望程度,如例如使用杆184的图15中所示,则操作者在图1中箭头174的方向上推动手柄106和108。这个运动将钳爪118和120推抵于邻近于头部182的表面,并且成角度部分130和150被用作支点以将杆184向所述表面的外部推动。附加地和/或替代性地,钳爪118和钳爪120被用作左右运动的支点,且/或手柄106和108被简单地向上拉动以将杆184向基底中的开口的外部推动。因为刃部分128和148被近侧地定位在钳爪118和120上,所以齿122和132也另外/替代性地用作支点。
43.虽然已在附图和前述描述中详细图示和描述了本公开,但附图和前述描述在性质上应视为说明性的而非限制性的。应当理解,仅仅呈现了优选实施例,并且落入本公开的精神内的所有改变、修改和进一步应用都希望被保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。