1.本公开涉及飞机领域,并且具体地涉及飞机的制造,诸如冠部模块的安装。
背景技术:
2.在航空工业中,涉及机架组件的运输和组装的操作在固定单元中执行。在每个单元中,结构被扫描和/或转位到该单元,并且然后工具、设备、和/或工人被带到该结构的需要在该单元中作业的那部分。每当新结构被带到该单元时,就发生这种扫描和/或转位的处理。此外,当结构被移动到下一个单元时,其被再次扫描和/或转位到该单元,并且必要的工具、设备和/或工人被带到该结构的需要在该单元中作业的那部分。当前组装方法需要工具、用具和技术人员通过筒端部或门道进入作为机身的一部分的筒部分。用具和工具必须被设置在筒部分内的适当位置。当作业完成时,用具、工具和技术人员必须通过筒端部或门道运出。
3.因此,期望具有考虑至少一些上述问题以及其它可能问题的方法和装置。
4.us 2012/137487 a1的摘要陈述了:“一种用于在飞机中安装内部组件的方法包括:预安装第一内部组件并且预安装第二内部组件。所述第一内部组件和所述第二内部组件中的至少一个被固定到安装设备,并且所述第一内部组件和所述第二内部组件被连接以形成独立模块。被固定到安装设备的多个单独模块互连以形成固定到安装设备的大模块。大模块从安装设备被拆卸并运输到飞机机身元件中的最终安装位置。然后,将拆卸的大模块安装在飞机机身元件中。”5.us 2013/019446 a1的摘要陈述了:“一种用于通过相对于表示组装级数据模式的机器数据适当地定位多个组装面板来组装飞机机身或机舱的360度部分的系统和方法,使用所述机器靠近所述面板的第二蒙皮边缘钻出全尺寸孔,使用所述机器净修整所述面板的第二边缘,然后使用靠近所述第二蒙皮边缘的所述全尺寸孔作为对准特征,以靠近第一蒙皮边缘将多对面板适当地取向并附接在一起,通过辅助机器与第二蒙皮边缘相对,形成面板对。控制系统可以分开且独立地安装到面板对中,然后面板对可以被连接在一起,靠近第二边缘将全尺寸孔对准,并且靠近第二蒙皮边缘将紧固件插入对准的全尺寸孔。”6.us 9 644 765 b2的摘要陈述了:“一种用于将飞机系统组件安装在飞机的冠部区域中的系统,该系统包括:第一纵向承载元件、第二纵向承载元件和桥接元件,该桥接元件将第一纵向承载元件连接至第二纵向承载元件。所述系统可以安装在飞机的冠部区域中,使得第一纵向承载元件和第二纵向承载元件基本平行于飞机的纵向轴线延伸。在第一和/或第二纵向载体元件上提供了用于容纳多条电线的多个缆线管道。”
技术实现要素:
7.本文描述的实施方式提供了连续线组装布局和系统,其使得能够对移动机架组件执行作业,所述移动机架组件在处理方向上脉动或连续移动以横跨对机架组件执行作业的工位的路径。作业可以包括将用于硬化的预成型件铺设成复合部件、在高压釜中硬化复合
部件、安装框架、切出用于窗户或门的孔等。特定实施方式涉及制造冠部模块以及将冠部模块安装到机身的上半筒部分中。这些布置提供了优于现有系统的技术益处,因为它们减少了在工厂地板处制造和组装所需的空间量,增加了吞吐量,并减少了停机时间。
8.一方面,提供一种用于组装飞机的方法。该方法包括:接收机身的处于冠部向上取向的上半筒部分;以及将冠部模块安装到所述上半筒部分中。
9.在另一方面中,提供了一种用于制造冠部模块的方法。该方法包括:在处理方向上使天花龙骨脉动;将用于冠部模块的额外组件准时提供到执行冠部模块的组装的多个工位;以及在脉动之间的暂停期间操作所述工位以组装所述冠部模块。
10.在又一方面,提供了一种系统,该系统包括:多个工位,其将冠部模块组件安装到天花龙骨上;轨道,其使天花龙骨在处理方向上前进通过工位;以及至少一个馈送线,其与工位中的一个相关联,该馈送线可操作以将冠部模块组件准时提供给工位以用于安装到天花龙骨上。
11.其它示例性实施方式(例如,涉及前述实施方式的方法和计算机可读介质)可在以下描述。已经讨论的特征、功能和优点可以在各种实施方式中独立地实现,或者可以在其它实施方式中组合,其进一步的细节可以参考以下描述和附图看出。
附图说明
12.现在仅通过示例并参考附图来描述本公开的一些实施方式。在所有附图中,相同的附图标记表示相同的元件或相同类型的元件。
13.图1示出了由半筒部分制造的飞机。
14.图2描绘了示例性实施方式中的用于工厂的组装环境。
15.图3描绘了示例性实施方式中的用于工厂的组装线。
16.图4是示例性实施方式中的用于将地板龙骨安装到机身的下部部分中的冠部模块组装线的框图。
17.图5是示例性实施方式中的用于将冠部模块安装到机身的上部部分中的冠部模块组装线的框图。
18.图6示出示例性实施方式中的机身的横截面。
19.图7是示出了在示例性实施方式中的利用图4和图5的冠部模块组装线的方法的流程图。
20.图8是示出了示例性实施方式中的节拍时间组装的方法的流程图。
21.图9概括地示出了示例性实施方式中的生产系统的控制组件。
22.图10是示出示例性实施方式中的制造冠部模块的方法的流程图。
23.图11是示出制造机架的一部分的方法的流程图。
具体实施方式
24.附图和以下描述提供本公开的特定示例性实施方式。因此,应当理解,本领域技术人员将能够设计尽管在本文中未明确描述或示出但体现本公开的原理并包括在本公开的范围内的各种布置。此外,本文描述的任何示例旨在帮助理解本公开的原理,并且将被解释为不限于这种具体陈述的示例和条件。因此,本公开不限于以下描述的具体实施方式或示
例,而是由权利要求限定。
25.本文所讨论的机架组件可以由金属制造或者可以制造为复合部件。复合部件(诸如碳纤维增强聚合物(cfrp)部件)最初被铺设为多个层(一起被称为预成型件)。在预成型件的每个层内的各个纤维彼此平行地对准,但是不同的层表现出不同的纤维取向,以便沿着不同尺寸增加所得到的复合部件的强度。预成型件包括粘性树脂,该粘性树脂固化以使预成型件硬化成复合部件(例如,用于飞机中)。已经用未固化的热固性树脂或热塑性树脂浸渍的碳纤维被称为“预浸料”。其它类型的碳纤维包括没有用热固性树脂浸渍但可以包括增粘剂或粘合剂的“干纤维”。在固化之前用树脂灌注干纤维。对于热固性树脂,硬化是被称为固化的单向处理,而对于热塑性树脂,如果再加热,树脂达到粘性形式。
26.现在转到图1,描述了可以实现示例性实施方式的飞机10的视图。在该示例性示例中,飞机10具有附接至机身12的右机翼15和左机翼16。发动机14中的每一个附接到右机翼15和左机翼16。已知飞机10的实施方式具有附加发动机14和不同发动机布置。机身12包括尾部18和鼻部38。水平稳定器20、水平稳定器21和垂直稳定器23附接到机身12的尾部18。飞机10是机身12的大部分由多个半筒部分24形成的飞机的示例,在图2中部分地示出了其制造。当附接在一起时,多个半筒部分24形成机身12的大部分。
27.如上所述,机身12由多个半筒部分24制成。半筒部分24被构造为上半筒部分40或下半筒部分42,其最终连接在一起以形成全筒部分44。图1示出了多个全筒部分44,包括44-1、44-2、44-3、44-4、和44-5。为了完整性,使用上半筒部分40-1和下半筒部分42-1制造全筒部分44-1,使用上半筒部分40-2和下半筒部分42-2制造全筒部分44-2,使用上半筒部分40-3和下半筒部分42-3制造全筒部分44-3,使用上半筒部分40-4和下半筒部分42-4制造全筒部分44-4,并且使用上半筒部分40-5和下半筒部分42-5制造全筒部分44-5。全筒部分44-1、44-2对应于视图a-a,并且示出全筒部分44被连续紧固到机身12中。下半筒部分42-3有时被称为翼盒,因为右机翼15和左机翼16附接至该部分。
28.除非另外特别描述,所有上述半筒部分(例如,上半筒部分40和下半筒部分42)将总体称为半筒部分24。如图1所示,每个半筒部分24包括以框架间距147隔开的一个或更多个框架146,该框架有助于限定半筒部分24的内模线(iml)放样60和外模线(oml)放样62。在一些实施方式中,半筒部分24包括硬化的复合蒙皮部件或金属蒙皮部件,诸如等待安装窗围145和门围145-1(视图a-a)和框架146以增强刚性。
29.图2示出了示例性实施方式中的组装环境100。组装环境100包括有助于飞机(诸如飞机10)的有效且可重复制造的机器和工具的布置。组装环境100已经被增强,以能够在连续的微脉动和/或脉动组装线上制造和组装大型机架组件,诸如用于机翼面板或机身的部分的那些机架组件。这使得结构的需要作业的部分能够被带到工人、工具和设备,而不是要求工人、工具和设备被带到结构中或进入结构中。组装环境100通过减少在机架的组装期间消耗的非增值时间的量提供了显著益处,同时还通过增加作业密度减少了工厂空间的占用量。实施方式具有作为飞机模型的复合蒙皮部件的半筒部分24和作为沿着组装环境100连续行进的金属蒙皮部件的另一半筒部分24。
30.处理跟踪服务器102通过存储器104和控制器106来跟踪和/或管理组装环境100的操作,在所示的实施方式中,控制器106包括组装线110、120。组装线110操作以对上半筒部分116和下半筒部分118执行组装操作。组装线120操作以对上半筒部分126和下半筒部分
128执行组装操作。组装线110与120之间的一个差异是组装线110被构造成用于组装非圆柱形半筒部分,而组装线120被构造成用于组装圆柱形半筒部分。通常,组装线110和120的操作是相同的,并且将使用参考在两个组装线110、120中发现的组件的参考标号,例如,工位114、124,其中,工位114位于组装线110内并且工位124位于组装线120内。当提及组装在组装线110、120中的组件时,使用类似方法。例如,上半筒部分116在组装线110中被组装,而上半筒部分126在组装线120内被组装。类似地,下半筒部分118在组装线110中被组装,而下半筒部分128在组装线120内被组装。当两条组装线110、120之间的差异相关时,将在此提供解释。
31.如本文进一步讨论的,处理跟踪服务器102指导组装环境100中的一个或更多个工位114、124的操作。在该实施方式中,处理跟踪服务器102包括存储器104,该存储器存储用于操作组装线110、120的一个或更多个数控(nc)程序。处理跟踪服务器102的控制器106可以进一步处理来自工位114、124和/或组装线110、120的反馈,并且基于该反馈向工位114、124提供指令或向操作者报告。
32.在一个实施方式中,与工位114、124相关联的rfid读取器或其它转位组件115、125使得转位动作能够直接向工位114、124提供指令。所述指令用于上半筒部分116、126和下半筒部分118、128在工位114、124的范围114-1、124-1内的部分。在这种实施方式中,可以在控制器106与特定工位之间传递指令。控制器106可以实现为例如定制电路、执行编程指令的硬件处理器或其一些组合。存储器104存储用于操作控制器106的指令,并且存储数字数据。
33.在该实施方式中,组装环境100包括用于制造机身12的在其长度上表现出非均匀截面的多个部分的组装线110,并且还包括用于制造机身12的在其长度上表现出大致均匀截面的多个部分的组装线120。组装线110分别处理上半筒部分116和互补的下半筒部分118。组装线120分别处理上半筒部分126和互补的下半筒部分128。当上或下不相关时,上半筒部分116和下半筒部分118在本文中有时一起称为半筒部分117,而上半筒部分126和下半筒部分128在本文中有时一起称为半筒部分127。弓形部分119是指任何类型的筒部分,包括半筒部分117、127、四分之一筒部分和三分之一筒部分,具有或不具有均匀的横截面。
34.半筒部分117、127对应于在通过组装环境100处理之后的半筒部分24。本文所讨论的组装线110、120可以进一步操作以制造多组半筒部分117、127或其它弧形部分119。
35.组装线110被构造有工位114,所述工位114能够容纳具有更奇特形状(诸如锥形的)的上半筒部分116和下半筒部分118、以及鼻部38或尾部18附近的其它弓形部分119。与第一组装线110相关联的工位114呈现较宽范围的运动,以便适应这些半筒部分117和非均匀截面弓形部分119的锥形特性。
36.组装线110还包括轨道112,上半筒部分116和下半筒部分118沿着轨道112在处理方向199上行进。轨道112包括驱动系统113以使半筒部分117沿着轨道112前进。轨道112使半筒部分117在处理方向199上到达在处理方向199上连续布置的工位114、124处的工具和设备(未示出)。
37.轨道112可以包括具有滚轮、轨道或一组轨道(未示出)等的一系列离散支柱,并且轨道112处的机架组件可以在处理方向199上递增地脉动跨过工位114、124。工位114、124连续地对准,并且半筒部分117或弓形部分119连续地行进通过工位114、124。虽然仅示出了几个工位,但是考虑许多工位,因为工位114、124可以被构造成执行多个操作,诸如但不限于
脱模、安装窗围、安装门围、修整制造过量件、安装框架、切出窗制造过量件或以其它方式去除材料、ndi检查、边缘密封、切出门制造过量件、安装窗和安装门。一些工位114、124可以执行多个上面列出的任务,而其它工位114、124专用于单个任务。
38.在一个实施方式中,工位114、124被间隔开并且被操作,使得由多个工位对机身12的上半筒部分116同时执行作业。对于下半筒部分118同样如此。在另一实施方式中,至少部分基于半筒部分117或弓形部分119被制造的节拍时间,以作业密度布置工位114。对于关于上半筒部分126和下半筒部分128的工位124也是如此。即,至少部分基于用于半筒部分127或弓形部分119被制造的节拍时间,以作业密度布置工位124。
39.组装线110处理上半筒部分116并且将其递送到组装台320(例如被构造为冠部模块附接工位),用于附接冠部模块364。组装线110处理下半筒部分118,以便递送到组装台330(例如被构造为地板龙骨附接工位),以便接合到客舱地板龙骨324和/或货舱地板龙骨326。
40.以大致相同的方式,工位124间隔开并且在组装线120中操作以沿着具有驱动系统113-1的轨道122处理上半筒部分126和下半筒部分128(即,半筒部分127)。组装线120处理上半筒部分126,并且将其递送到组装台321以接合到冠部模块364,并且处理下半筒部分128,所述下半筒部分128被递送到组装台331以接合到客舱地板龙骨324和/或货舱地板龙骨326。应当理解,用于上半筒部分116的冠部模块与用于上半筒部分126的冠部模块不同,因为上半筒部分126被表示为圆柱形的并且比上半筒部分116更长,但是为了便于理解,这两个冠部模块在此将被称为冠部模块364。类似地,无论参考哪个下半筒部分,客舱地板龙骨都被称为客舱地板龙骨324并且货舱地板龙骨都被称为货舱地板龙骨326,地板龙骨在本文中在随后的图中总体被称为地板龙骨365(图5)。
41.组装线120包括轨道122,上半筒部分126和下半筒部分128以与上面针对组装线110描述的方式类似的方式沿着轨道122在处理方向199上行进。组装线120还包括具有转位组件125的工位124。工位124、转位组件125和轨道122可以以与组装线110的类似叙述组件类似的方式实现。然而,这些工位124的不同之处可能在于它们可以更紧密地符合正在其上作业的上半筒部分126和下半筒部分128中的每个。上半筒部分126和下半筒部分128之间的横截面变化小于上半筒部分116和下半筒部分118之间的横截面变化。如上所述,第二组装线120的上半筒部分126和下半筒部分128在形状和尺寸上比组装线110的上半筒部分116和下半筒部分118更均匀。
42.在另外的实施方式中,额外组装线制造右机翼15和左机翼16以用于与机身12组装在一起,形成完整机身。组装线110、120以脉动方式操作,其中上半筒部分116、126和下半筒部分118、128在处理方向199上前进等于脉动123、123-1或微脉动129的长度的距离。微脉动129小于脉动长度123、123-1,并且在实施方式中,微脉动129等于上半筒部分116、126和下半筒部分118、128的框架146之间的框架间距147或其分数或多倍。对于组装线110和120,脉动长度123或微脉动129的长度可以是相同的,或者它们可以是不同的。在一实施方式中,框架间距147为约45cm至约91cm(约18英寸至约36英寸)。在微脉动129之后,上半筒部分116、126和下半筒部分118、128暂停,然后在处理方向199上再次产生微脉动129。
43.另一个实施方式具有在处理方向199上连续前进而不暂停的上半筒部分116、126和下半筒部分118、128。因此,本文所讨论的组装线110、120使得半筒部分117、127能够以脉
动、微脉动或连续方式在多个不同工位上以期望节拍行进。
44.在这些处理期间,用具(诸如铺设卷轴)可以根据需要被放置到轨道112、122上或从轨道112、122移除。在一个实施方式中,轨道112、122包括移动半筒部分117、127的驱动系统113、113-1,诸如链驱动系,但是在进一步的实施方式中,这些部分沿着轨道112、122被独立地驱动。
45.在一个实施方式中,并且参考组装线110,上半筒部分116和下半筒部分118在处理方向199上同时同步脉动相同量距离。然后,工位114在脉动之间的暂停中和/或在共同节拍时间的暂停期间对上半筒部分116或下半筒部分118执行作业。由此,在制造处理期间,在微脉动129之间的同一暂停期间和/或微脉动129期间,多个工位114对上半筒部分116和/或下半筒部分118进行作业。
46.类似地,并且参考组装线120,上半筒部分126和下半筒部分128在处理方向199上同时同步脉动相同量距离。然后,工位124在脉动之间的暂停中和/或在共同节拍时间的暂停期间对上半筒部分126或下半筒部分128执行作业。由此,在制造处理期间,在微脉动129之间的相同暂停期间和/或微脉动129期间,多个工位124对上半筒部分126和/或下半筒部分128进行作业。
47.在组装线110的一个实施方式中,一个或更多个工位114还在脉动期间在相同的半筒部分、半筒部分117或弓形部分119上独立地或同步地执行它们的作业。类似地,关于组装线120,一个或更多个工位124还在脉动期间对相同的半筒部分、半筒部分127或弓形部分119独立地或同步地执行它们的作业。这样的工位可以被称为行进工位139、139-1,因为它们附接到半筒部分并随半筒部分移动。该作业可以包括非破坏性检查(ndi)、制造过量件的修整、或者密封剂的施加或其它处理。在另外的实施方式中,半筒部分117、127沿着轨道112、122继续行进,并且当半筒部分117、127和附接到半筒部分117、127的行进工位139、139-1继续移动时,工位114、124对半筒部分117、127执行作业。
48.在组装线110或120的一些实施方式中,半筒部分117、127以预定间隙131隔开,预定间隙131诸如等于微脉动129距离,诸如框架间距147的分数或多倍或小于或等于半筒部分117、127或弓形部分119的长度的任何距离。间隙131有助于解决生产延迟,诸如半筒部分117、127或弓形部分119或工位114、124的维修和/或技术人员休息时间的返工或偏位作业。
49.很少要求返工或偏位作业,但是在某些情况下,当需要返工或偏位作业的半筒部分117、127或弓形部分119的一部分在工位114、124之间或在不需要执行作业的工位(诸如与下半筒部分118相对的窗围安装工位)内时,可执行返工或偏位作业。这使得未计入的延迟能够被吸收到生产处理中。可以在工位114、124之间的间隙131内执行上述返工或偏位作业。此外,在一个实施方式中,在执行返工或偏位作业时,半筒部分117、127或弓形部分119继续行进通过工位114、124。因此,组装环境100在处理方向199上不停止前进,以对半筒部分117、127或弓形部分119进行作业,适应返工或偏位作业。这种偏位作业可以包括计划维修和未计划维修。
50.在移动期间或在脉动长度123、123-1的微脉动129之间,半筒部分117、127或弓形部分119在工位114、124处遇到转位组件115、125。转位组件115、125与上半筒部分116、126和下半筒部分118、128上或中的转位特征133物理地相互作用或非破坏性地检查转位特征,并且在执行作业之前使得能够与工位114、124对准。
51.转位特征133(诸如物理特征或射频识别(rfid)芯片)由与工位114、124相关联的转位组件115、125使用。每个转位组件115、125都将上半筒部分116、126和下半筒部分118、128的3d表征在工位114、124的范围114-1、124-1内传送至工位114、124。转位还使得能够确定工位114、124将在特定半筒部分上完成哪些任务。工作/任务基于转位特征133传送到转位组件115、125的信息。
52.返回参考图1,3d表征的示例是内模线(iml)放样60和/或外模线(oml)放样62。上述转位导致对工位114、124的关于将由工位114、124对上半筒部分116、126和下半筒部分118、128执行的作业的指令。针对相应的多个工位(工位114、124),可以多次并且同时每脉动或微脉动129执行该转位处理。然后,工位114、124可以在微脉动129之间的暂停期间或在微脉动129本身期间执行作业。
53.转位组件115、125可以包括与转位特征133互补的硬止动件、销、孔或凹槽,用于与转位特征133物理固定。实施方式具有布置在上半筒部分116、126和下半筒部分118、128上的许多转位特征,例如制造过量件。在另外的实施方式中,转位组件115、125可以包括传感器,诸如激光、超声波或视觉检查系统,这些传感器跟踪转位特征133并且然后与这些转位特征对准。
54.另外的转位特征(转位特征133)还包括rfid芯片。rfid读取器是读取rfid芯片的转位组件115、125的另一个实施方式。这些非接触技术可以例如在连续移动上半筒部分116、126和下半筒部分118、128的组装线110、120内利用,并且可以进一步用于控制半筒部分117和/或弓形部分119的移动。
55.在另外的实施方式中,硬止动件、销、孔或凹槽的与转位特征133互补的转位组件115、125用于利用行进工位139、139-1的连续移动系统。在这些实施方式中,在上半筒部分116、126和下半筒部分118、128在下一个工位的范围114-1、124-1内前进期间,发生转位特征133至转位组件115、125的接合。工位114、124可以在上半筒部分116、126和下半筒部分118、128在处理方向199上前进时跟踪它们。继续地,行进工位139、139-1在工位114、124中被附接至上半筒部分116、126或下半筒部分118、128,并且随着其以微脉动、脉动、或连续地前进而与半筒部分117、127一起行进。
56.行进工位139、139-1对半筒部分117、127执行其作业,并且然后分离并返回至附接点139-2以供未来使用。行进工位139、139-1的示例是柔性轨道设备或遵循可移除地安装到上半筒部分116、126和/或下半筒部分118、128上的轨道的一些类似设备。
57.在进入组装环境100之前,将上半筒部分116、126和下半筒部分118、128铺设在分别以冠部135、135-1向上和脊状部137、137-1向上取向的铺设卷轴(未示出)上。下半筒部分118、128的取向由从铺设卷轴脱模、通过地板龙骨365安装、直到下半筒部分118、128被反转至脊状部137、137-1向下取向而保持。该反转刚好在脉动到接合工位194之前在反转工位(未示出)中发生。这种构造使得不同工位能够在制造期间通过相同工位以脉动方式连续地处理上半筒部分116、126和下半筒部分118、128。
58.在一个实施方式中,上半筒部分116、126和下半筒部分118、128分别在组装线110、120上的取向由铺设卷轴设定,所述部分被铺设在所述铺设卷轴上。铺设卷轴从通过铺设在其上的预成型件进行固化来铺设而前进。在硬化之后,在不改变上半筒部分116、126和下半筒部分118、128取向的情况下,然后从相应的铺设卷轴移除上半筒部分116、126和下半筒部
分118、128。
59.在实施方式中,在组装线110、120上连续处理多个飞机模型。用于一个模型的上半筒部分116、126和下半筒部分118、128沿着组装线110、120连续地向下行进,随后是不同模型的上半筒部分116、126和下半筒部分118、128。例如,下半筒部分118、128沿着组装线110、120向下前进,接着是互补的上半筒部分。同样地,如果这种生产方法满足需要,则这些下半筒部分118、128和上半筒部分116、126之后可能是另一飞机模型的下半筒部分118、128和上半筒部分116、126,之后是还有的另一模型的下半筒部分118、128和上半筒部分116、126等。此外,在一些实施方式中还设想了多于一个组装线110、120,以确保以期望速率生产上半筒部分116、126和下半筒部分118、128。
60.在一些实施方式中,本文所讨论的工位114、124具有在上半筒部分116、126和下半筒部分118、128的不同部分上执行作业的能力,并且能够适应不同模型的不同直径。转位组件115、125与转位特征133之间的每个转位操作告知工位114、124哪些下半筒部分118、128和上半筒部分116、126以及哪些飞机模型在其范围114-1、124-1内以及需要执行什么作业,或者是否不需要执行任何作业。例如,当下半筒部分118、128在其范围114-1、124-1内时,由于不需要窗切割,窗制造过量件切割工位可避免产生窗切割。
61.处理跟踪服务器102跟踪和/或管理这里所讨论的组装线110、120的操作,例如通过指导组装环境100中的一个或更多个工位114、124的操作。在该实施方式中,处理跟踪服务器102包括存储器104,其存储用于操作组装线110、120的一个或更多个数控(nc)程序。处理跟踪服务器102的控制器106可以进一步处理来自工位114、124和/或组装线110、120的反馈,并基于该反馈向工位114、124提供指令或向操作者报告。在一个实施方式中,rfid读取器或其它转位组件125实现转位动作以直接向工位118、128提供针对上半筒部分116、126和下半筒部分118、128在工位114、124的范围114-1、124-1内的部分的指令。在这种实施方式中,可以在控制器106与特定工位之间传递指令。控制器106可以实现为例如定制电路、执行编程指令的硬件处理器或其一些组合。存储器104存储用于操作控制器106的指令,并且可以包括用于存储数字数据的适当容器。
62.根据图2,在组装线110处的每个工位114可以由馈送线149馈送/供应材料和/或组件(例如,基于机身的一部分的节拍时间,并且如图3所示),并且这些材料和/或组件被附接到正由工位114、124在其上作业的上半筒部分116、126和下半筒部分118、128。馈送线149向工位114、124提供附加材料/组件。每条馈送线149被设计成在节拍时间产生材料以便准时(jit)向工位114、124提供附加材料/组件以组装到更大的结构(例如,机身的部分)(其也在节拍时间脉动)上。即,馈送线149按照由工位114、124使用的顺序将组件jit递送到工位114、124。在一个实施方式中,具有等于机身节拍时间的分数的节拍时间的馈送线149。
63.馈送线149和/或组装线110、120的节拍时间不需要是相同的。例如,上半筒部分116和下半筒部分118可同时微脉动通过多个工位114。上半筒部分116和下半筒部分118被转位到工位114,并且每个专用馈送线执行例如ndi、窗围安装、门围安装、窗制造过量件修整/移除、门制造过量件修整/移除、安装窗和安装门等。馈送线149还包括来自工位114的输出,包括ndi检查数据和上半筒部分116和下半筒部分118的任何过量件修整。对于组装线120和其中的各种组件以及组装在其中的各种组件,可以发生类似的情形。
64.在另一示例中,馈送线149将框架146jit提供至将框架146安装到上半筒部分116
和下半筒部分118上的工位114。同样地,馈送线149向安装窗围的工位114jit提供窗围,并且向安装门围的工位114jit提供门围。对于每条馈送线149,基于相关联的工位114的节拍来设计生产时间。馈送线149均在制造期间使组件连续地脉动,并且已完成的组件以共同节拍时间到达每个工位114。该节拍时间设计通过每条馈送线149从最小部件行进到最大最终组件。
65.如果不能实现节拍时间,则可以调整特定工位的作业报表以减少或增加在特定工位处发生的作业量。在另一实施方式中,可以基于整个组装线110的工作报表和期望节拍时间,从处理中添加或移除工位114。节拍时间被认为是每月的分钟数除以每月的期望单位(例如,飞机、桁条、框架等)的数量。微脉动节拍时间的总和等于节拍时间的脉动。即,在等于全脉动的多个微脉动之后,整个单元已经通过组装线110前进了其长度。例如,组装线110由整数倍的标准模块工位组成,该标准模块工位使得其能够被预先设计为具有低速率的空白或未使用的工位,并且如果某些处理需要,则将具有功能的工位添加到那些未使用的工位中,以在对产品输出敏感的区域中容纳更高产品输出。
66.根据图2,并且具体地参考组装线120,并且类似于组装线110,组装线120处的每个工位124可通过馈送线149被馈送/供应材料和/或组件(例如,基于半筒部分127的节拍时间,并且如以下图3所示),并且这些材料和/或组件附接到正在由工位124作业的上半筒部分126和下半筒部分128。馈送线149向工位124提供附加材料/组件。每条馈送线149被设计成用于在节拍时间产生材料以便准时(jit)将附加材料/组件提供给工位以组装到更大的结构(例如,机身的部分)上,该更大的结构也在节拍时间脉动。馈送线149节拍时间可以与组装线120的节拍时间相同或不同。即,馈送线149按照由工位124使用的顺序将组件jit递送到工位124。在一个实施方式中,馈送线149具有等于机身节拍时间或机身节拍时间的一部分的节拍时间。
67.馈送线149和/或组装线120的节拍时间不必相同。例如,上半筒部分126和下半筒部分128可以同时微脉动通过多个工位124。上半筒部分126和下半筒部分128被转位到工位124,并且每条馈送线149执行ndi、窗围安装、门围安装、窗制造过量件修整/移除、门制造过量件修整/移除、安装窗和安装门等。馈送线149还包括来自工位124的输出,包括ndi检查数据以及上半筒部分126和下半筒部分128的任何过量件修整。馈送线149与主组装线的脉动时间或速度同步,以在需要时提供所需的内容。
68.在另一示例中,馈送线149将框架146jit提供至将框架146安装到上半筒部分126和下半筒部分128上的工位124。同样地,馈送线149向安装窗围的工位124jit提供窗围,并且向安装门围的工位124jit提供门围。对于每个馈送线149,基于相关联的工位124的节拍来设计生产时间。馈送线149均在制造期间使组件连续地脉动,并且已完成的组件以共同节拍时间到达每个工位124。该节拍时间设计通过每条馈送线149从最小部件行进到最大最终组件。
69.如果组装线120或馈送线149不能实现节拍时间,则可以调整特定工位的作业报表(statement)以减少或增加在特定工位处发生的作业量。在另一实施方式中,可以基于整个组装线的作业报表和期望节拍时间从组装线120添加或移除工位124。节拍时间被认为是每月的分钟数除以每月的期望单位(例如,飞机、桁条、框架146等)的数量。微脉动节拍时间之和等于节拍时间的全脉动。即,在多个微脉动129等于前进其长度通过组装线120之后。
70.图2进一步描绘了分别接收组装线110和120的输出的机架组装区域180和机架组装区域190。上半筒部分116、126和下半筒部分118、128被接合成关于图1描述的各种全筒部分。重要的是要注意,上半筒部分116和下半筒部分118以各种形状和长度出现,如图2所示。
71.上半筒部分116和下半筒部分118的接合发生在接合工位182内并且上半筒部分126和下半筒部分128的接合发生在接合工位192内。接合工位184是工位182的一部分,并且接合工位194是工位192的一部分。因此,全筒部分44沿着轨道186和196前进到作业单元188。在另外的实施方式中,本文讨论的组装线110、120的操作被合并成单个组装线。
72.箭头101指示不同形状的上半筒部分116和下半筒部分118在它们离开组装线110并进入机架组装区域180时移动的位置。例如,箭头101描绘了下半筒部分118和上半筒部分116分别移动到组装台320和组装台330,然后移动到接合工位184用于接合,并且移动到不同组装线等。箭头101指示相似形状的上半筒部分126和下半筒部分128在它们离开组装线120并进入机架组装区域190时移动的位置。例如,箭头101描绘了下半筒部分128和上半筒部分126分别移动到组装台321和组装台331,然后移动到用于接合的接合工位194,并移动到不同的组装线等。
73.在实施方式中,在组装台320和330中,上半筒部分116分别与冠部模块364接合,并且下半筒部分118分别与货舱地板龙骨326和/或客舱地板龙骨324接合。组装台320和330是上半筒部分116和下半筒部分118组装处理的一部分,很像组装台321和331是上半筒部分126和下半筒部分128组装处理的一部分,其中类似地安装冠部模块364、货舱地板龙骨326和客舱地板龙骨324。同样地,接合工位184是用于上半筒部分116和下半筒部分118的组装处理的一部分,并且类似地对应于接合工位194,接合工位194是用于上半筒部分126和下半筒部分128的组装处理的一部分。
74.图3描绘了示例性实施方式中的工厂中的组件170-1、170-2的组装线150。组装线150可以用于任何组件170-1、170-2,诸如用于后硬化或预硬化制造和/或组装处理,并且可以用作馈送线149(图2)以提供由下游组装线150使用的组件170-1、170-2。组件170-1可以与组件170-2不同和区分,或者组件170-1和170-2可以完全相同。例如并且与随后的附图相关,组件170-1、170-2是肋间部522、地板梁524,或者可能是在完成的各个台的冠部模块364或地板龙骨365。
75.组件170-1和组件170-2前进通过连续布置的工位152-1至152-n,其中,在微脉动129-3期间或微脉动129-3之间的暂停期间,这些多个工位对组件170-1执行作业,而附加的工位152对组件170-2执行作业。应当理解,随着组件沿着组装线150移动,取决于组件通过组装线150的行进,只有单个工位可能对单个组件执行作业。
76.在该实施方式中,组装线150包括工位152-1至152-n,当组件170-1、170-2沿着轨道154行进时,这些工位执行诸如铺设、检查、硬化、修整、拾取和放置、接合、紧固等作业。组件170-1、170-2在处理方向199上的脉动(图2)或微脉动(图2)之间的相同暂停期间,工位152对组件170-1、170-2执行作业,诸如前述段落中提及的那些作业。
77.在所示实施方式中,工位152-n中的一个设置在组件170-1、170-2之间的间隙121处,所述组件170-1、170-2在处理方向199上移动或脉动。当设置在间隙121处时,工位152-n接收维护和/或检查,和/或操作工位152-n的技术人员可能在工位152-n不对组件170中的一个执行作业时进行休息。
78.在所示实施方式的一个示例中,出口线169-1承载来自工位152-1的检查数据167-1,而出口线169-2承载来自工位152-n之一的被去除材料167-2。检查数据167-1的示例是来自被构造为ndi工位的工位152的组件170的检查数据。类似地,当组件170被机械修整时,被移除材料167-2从出口线169-2上的两个工位152-n被取出,工位152-n被构造为修整工位。
79.馈送线160-1至160-n向工位152-2、152-3和工位152-n中的一个提供子组件162-1、162-n。在一个示例中,子组件162-1联接到工位152-2中存在的组件170。子组件162-1、162-n到达工位152-2、152-n,并且这些工位152-2、152-n通过消耗、放置或以其它方式利用子组件162-1、162-n来利用子组件162-1、162-n以促进组件170-1、170-2的制造。
80.路径164通过每个工位152的入口165-2和出口165-3,针对组件170,在工位152-2处示出了其示例。在该实施方式中,每条馈送线160-1、160-n向工位152-1、152-2、152-3、152-n提供子组件162-1、162-n,并且可经由独立于路径164的入口/出口端口165-1提供子组件162-1、162-n。
81.被移除材料167-2还可经由入口/出口端口165-1被移除。在一个实施方式中,馈送线160-1、160-n和组装线150的动作被协调以促进根据工位152进行作业的组件170-1、170-2的节拍时间将组件准时(jit)交付到其馈送的后续组装线150-1。在一个实施方式中,组装线150被用于制造冠部模块364(图4和图5),并且馈送线160提供冠部模块组件,诸如准时(jit)被提供用于接合到冠部模块中的支撑结构、装载箱、照明、天花板以及绝缘体。
82.在一个实施方式中,工位152-1、152-2、152-3和152-n中的一个或更多个包括ndi工位、这些ndi工位下游的返工工位,这些返工工位解决了由ndi检查识别的任何超出公差的条件。这些工位152-1、152-2、152-3、152-n中的许多工位包括馈送线160-1、160-n,所述馈送线专用于输入旨在用于在所述工位152-1、152-n处添加的材料。组装线150代表组装线110、组装线120、机架组装区域180和机架组装区域190中的一个或全部。如本文进一步描述的,组装线150还可以表示组装台320、321、330和331。
83.图4是示例性实施方式中的用于将冠部模块364安装到机身12的上半筒部分116、126中的冠部模块馈送线700的框图。具体地,图4示出一系列连续布置的工位,每个工位之间具有脉动长度123。如图4所示,冠部模块馈送线700包括处理跟踪服务器710,该处理跟踪服务器710利用控制器712和存储器714来跟踪上半筒部分116、126到组装台320、321(也参见图2)的行进。组装台320和321两者都用于图4的描述中,因为应当理解,该描述应用于如图2中介绍的上半筒部分116和126两者,并且两者都结合冠部模块364的一些实施方式。
84.冠部模块364经由轨道716前进,并且经由联接到冠部模块364的转位特征704(类似于关于图2描述的转位特征133)转位到工位720、730、740、750、760和组装工位320、321。每个工位720、730、740、750、760联接至转位组件718(类似于关于图2描述的转位组件115和125)。
85.冠部模块364经由与转位组件718对接的转位特征704被转位到工位720、730、740、750、760。如所示,在轨道716上示出了冠部模块364中的每个的多个次出现。实施方式在每个工位720、730、740、750、760处以及在组装台320、321处具有冠部模块364、以及从一个工位到下一个工位的全脉动118-3。如本文所讨论的,用于工位720、730、740、750、760和组装台320、321中的每个的馈送线722、732、742、752、762和772可进一步根据微脉动、全脉动或连续线制造技术来控制,以便确保材料被准时递送以用于安装。这可能涉及跟踪和/或控制
来管理材料的行进。
86.在该实施方式中,冠部模块馈送线700包括工位720、冠部模块龙骨工位(其组装冠部模块364的天花龙骨)。馈送线722向工位720提供天花龙骨组件,用于接合到天花龙骨中。然后,天花龙骨被全脉动至绝缘件附接工位730,该绝缘件附接工位安装绝缘件。馈送线732为绝缘件附接工位730提供绝缘件,用于安装到天花龙骨中。具有绝缘件的天花龙骨全脉动到装载箱附接工位740。装载箱、紧固件以及其它需要的材料通过馈送线742被传送至装载箱附接工位740。在全脉动至天花板附接工位750之前,装载箱被附接至装载箱附接工位740内的天花龙骨和绝缘组件。天花板和其它所需材料经由馈送线752被jit递送到天花板附接工位750。在全脉动至照明件附接工位760之前,天花板被附接至天花板附接工位750内的天花龙骨、绝缘件和装载箱组件。照明件和其它所需材料经由馈送线762被jit递送到照明件附接工位760。在全脉动到组装台320、321以将完成的冠部模块364安装到上半筒部分116、126中之前,将照明件附接到照明附接工位760内的天花龙骨、绝缘件、装载箱和天花板组件。
87.馈送线722、732、742、752、762向在此讨论的工位720、730、740、750、760提供各种材料,诸如冠部模块组件、紧固件、绝缘件、装载箱、天花板、管件、电气系统、照明件等。
88.在进一步的实施方式中,冠部模块364准时到达以在组装台320、321处进行安装,其中天花龙骨、绝缘件、装载箱、天花板、照明件、电气组件和任何管件都在全脉动期间被安装到上半筒部分116、126中。因此,在这种实施方式中,在全脉动长度(脉动长度123)期间不发生微脉动并且执行所有组装操作。
89.图5示出冠部模块364通过微脉动129-4前进通过组装工位720-1、720-2、730、740、760-1、760-2和750,以在完成状态下到达冠部模块364的组装台320、321,以便在全脉动长度123内安装到上半筒部分116、126中。冠部模块364平行于上半筒部分116、126被组装,使得冠部模块364到达以完成安装,以便将上半筒部分116、126在组装台320、321中的时间减少到尽可能低。在工位的开始处示出的冠部模块364被示出为虚线,因为要理解的是,在某些实现中,在每个工位处添加的组件是最终形成冠部模块364的组件,当冠部模块364完成时,冠部模块以实线示出离开工位。
90.馈送线773为组装台320准时提供冠部模块364,并且准备好安装到上半筒部分116、126中。再次提到,对于馈送到组装台320中的上半筒部分116,冠部模块处理基本上与对于上半筒部分126和组装台321的相同,这就是为什么在说明书中使用116、126以及320、321的原因。
91.冠部模块364必须平行于上半筒部分116、126被组装,以将冠部模块364在组装台320、321中的附接的时间减少到尽可能低。各个冠部模块被反转组装。冠部模块364到达组装台320准备用于安装。冠部模块364由天花龙骨组件721-1、721-2组装,组合成具有绝缘件731、装载箱741以及电气和照明系统761-1、761-2的天花龙骨。天花板751然后被添加到该组件中。
92.应注意,天花板附接工位750和照明件附接工位760在图4和图5中以反转的位置示出。这旨在示出组装顺序由正在组装的飞机的架构而不是由工厂预测。可以想到,工位的其它顺序在本公开的范围内。
93.冠部模块364通过微脉动129-4经由馈送线773上的连续布置的工位720-1、720-2、
730、740、760-1、760-2和750来开始组装,每条馈送线722-1、722-2、732、742、762-1、762-2、752分别将正确部件的冠部模块组件准时(jit)递送到工位720-1、720-2、730、740、760-1、760-2和750以用于组装到冠部模块364中。天花龙骨组件721-1、721-2经由馈送线722-1和馈送线722-2被jit递送到工位720-1、720-2。微脉动129-4被示出为具有等于两个相邻工位之间的空间的长度或等于其范围774或其一些倍数或分数的长度。
94.冠部模块364通过微脉动129-4经由连续布置的工位730、740、760-1、760-2和750继续在馈送线773上组装,每个工位均具有馈送线732、742、762-1、762-2、752,这些馈送线jit馈送绝缘件731、添加的装载箱741、电气和照明系统761-1、761-2以及然后天花板751以分别组装到冠部模块364中。可选地,天花板751在被安装到上半筒部分116、126期间被放置到冠部模块中。
95.工位720-1、720-2、730、740、760-1、760-2和750在冠部模块364的微脉动129-4之间的暂停期间和/或微脉动129-4期间,随着冠部模块364前进通过地板龙骨馈送线、馈送线773而转位到冠部模块364。冠部模块364以单个或多个被转位至连续布置的工位720-1、720-2、730、740、760-1、760-2和750中的每个,以在工位720-1、720-2、730、740、760-1、760-2和750对冠部模块364作业之前在每个工位720-1、720-2、730、740、760-1、760-2和750的范围774内传送冠部模块364的3d表征。一个或更多个工位720-1、720-2、730、740、760-1、760-2和750在微脉动129-4之间的暂停期间和/或在微脉动129-4期间对冠部模块364执行作业。转位特征704可在冠部模块364的多个部分上或在传送冠部模块364的可移动夹具的多个部分上。
96.冠部模块364与上半筒部分116、126并联组装,并且jit到达组装台320、321处以用于安装到上半筒部分116、126中。馈送线722、732、742、752、762中的每个被示出为用于特定子组件的组装制造/递送线的端部。馈送线722-1和722-2分别将天花龙骨组件721-1和721-2放置到工位720-1和720-2中,并且将其添加到微脉动天花龙骨(参见用虚线描绘的冠部模块364)。馈送线732和742分别将绝缘件731和装载箱741分别放置到工位730和740中,并将其添加到微脉动天花龙骨。馈送线762-1、762-2将电气和照明系统761-1、761-2分别放置到工位760-1和760-2中,并且微脉动冠部模块开始成形(如由实线所表示的)。馈送线752将天花板751放置到工位750中,这些天花板被添加以完成冠部模块364,如图5中所示。
97.当设置在间隙121-4处时,工位740接收维护和/或检查,和/或操作工位740的技术人员休息和/或执行维护,同时工位740不对冠部模块364执行作业。尽管示出了七个工位和馈送线,但是在冠部模块364制造期间,任意数量的工位或馈送线都是可能的。
98.在本文中讨论的用于各种装载箱、其它冠部模块特征、地板龙骨元件等的馈送线可以被设计为制造整体单个组件(例如,用于放置在部分中的整个冠部模块或地板龙骨),以用于将其全部放置在机身部分中。在另外的实施方式中,馈送线同时提供多个组件。因此,例如,装载箱741可以安装为等于上半筒部分116、126或其一些部分的长度的全长。在另一示例中,安装冠部模块364包括安装上半筒部分116、126的冠部模块364的整体或其纵向部分。馈送线773将冠部模块364馈送到组装台320、321中,并且与馈送线782、792一起分别向组装台320、321准时提供密封剂和紧固件并且准备好安装到上半筒部分116、126中。在将冠部模块364安装到上半筒部分116、126中之后,上半筒部分116、126被放置到接合工位194中。本文讨论的用于各种装载箱、其它冠部模块特征、地板龙骨元件等的馈送线可以被设计
为制造集成的单个组件(例如,整个冠部模块或客舱地板龙骨324或货舱地板龙骨326),用于放置到半筒部分117、127中,用于整体放置到机身部分中。
99.在另外的实施方式中,馈送线同时提供多个组件。因此,例如,装载箱可以被安装为等于机身部分的长度的全长或者其一些部分。馈送线773将冠部模块364馈送到组装台320、321中,并且与馈送线782、792一起分别向组装台320、321准时提供密封剂和紧固件并且准备好安装到上半筒部分116、126中。在将冠部模块364安装到上半筒部分116、126中之后,上半筒部分116、126被放置到接合工位194中。
100.未示出,垂直反转工位使下半筒部分118、128围绕纵向中心线旋转以将其置于龙骨向下取向中。更具体地,下半筒部分118、128在接合到上半筒部分116、126之前围绕纵向中心线旋转(在图7中示出)。
101.如本文其它各处所述,接合工位194将下半筒部分128合并到上半筒部分126。该接合处理导致上半筒部分126和下半筒部分128纵向拼接在一起,包括拼接蒙皮和框架590以及在此的任何围绕物。拼接板(未示出)可完全安装在接合工位194中。在图6中,描绘了接合工位194中的全筒部分44的横截面,其包括客舱地板龙骨596和货舱地板龙骨594。图6进一步示出了已经向机身的整个筒部分44添加了冠部模块599和加强件597。如本文所描述的,冠部模块599包括装载箱和内部照明,并且为了清楚起见,在图6中未示出这些细节。绝缘件591和内部面板593也被示为被安装。
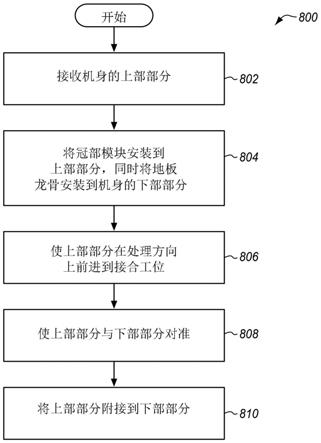
102.图7是示出了在示例性实施方式中的利用图4和图5的冠部模块组装线的方法800的流程图。方法800包括接收802处于冠部向上取向的上半筒部分116、126。接下来,将冠部模块364安装804到上半筒部分116、126中,同时将地板龙骨365安装到下半筒部分118、128中。上半筒部分116、126在处理方向199上前进806到接合工位194。然后,将上半筒部分116、126与相应的下半筒部分、下半筒部分118、128对准808。然后,将上半筒部分116、126附接810至下半筒部分118、128。利用本文所述的微脉动和/或全脉动,以按照与本文所讨论的技术类似的各种技术准时组装。
103.根据定义,上半筒部分116、126和下半筒部分118、128必须具有相同的节拍时间。换言之,在用户要求的时间间隔内需要上半筒部分126和下半筒部分128两者。继续,制造和处理下半筒部分128的作业量可多于或少于制造和处理上半筒部分126的作业量,但节拍时间是相同的,并且在组装线120的前部设计中得到解决。
104.在进一步的实施方式中,将上半筒部分116、126接合到下半筒部分118、128的方法与上述类似,但是上半筒部分116、126和下半筒部分118、128都前进到接合工位194。上半筒部分116、126和下半筒部分118、128被对准用于在接合工位194中接合,并且拼接面板被安装到上半筒部分116、126和/或下半筒部分118、128-2上以经由粘合和/或通过多排紧固件和紧密连接表面密封件形成对接拼接。
105.方法800提供了优于现有技术的技术益处,因为它使得冠部模块364能够在货舱地板龙骨326和客舱地板龙骨324被安装到相应的下半筒部分(下半筒部分118、128)中的同时被安装到上半筒部分116、126中。这增加了吞吐量和组装效率,因为需要许多协调来安装货舱地板龙骨326和客舱地板龙骨324以及冠部模块364,同时使用全筒部分44内的临时安装的用具。
106.图8是例示了一个代表性实施方式中的节拍时间组装的方法1400的流程图。方法
1400包括使系列子组件162(162-1至162-n)在共同节拍时间行进1402通过一系列工位152。在一个实施方式中,根据共同节拍时间输送子组件162。因此,从馈送线160jit提供递送,并且每条馈送线160可以具有或不具有共同节拍时间。馈送线160可以具有它们自己的节拍时间,并且该节拍时间可以等于或不等于机身节拍时间的分数。
107.术语节拍时间需要进一步解释。例如,并且参考图3,对于每个组装线150以及对于每条馈送线160,存在产品(ttp)的节拍时间。该描述应用于本文描述的其它附图,例如组装线110、120和馈送线149。通常,由于馈送线160总是需要与组装线150同步,所以节拍时间相同,但可以不同。例如,如果仅存在一条组装线150并且存在沿着组装线150的八个半筒部分,结合每32个可用小时要求八个半筒部分的产品需求,则组装线150的ttp是4小时。仅当脉动长度是所产生的产品的全长时,ttp等于脉动时间。在微脉动线的情况下,其中脉动长度是全部产品长度的一部分,必须考虑到产品之间的间隙121,并且脉动时间(pt)小得多。所有馈送线160都需要支持主线ttp、pt或速度。作为附加示例,如果脉动长度等于框架间距147(约2英尺),则框架馈送线将需要每框架工位递送多个框架146(例如,两个)。在一些半筒部分117上可能不存在门,所以馈送线160需要每个脉动时间供应两个框架。一些半筒部分117包括门,并且在这些区域中,至少几个微脉动内不需要框架146。然而,馈送线160仍然必须与组装线150脉动时间同步。如果每脉动的产品数量大于一个并且仅具有一条馈送线160,则馈送线160可以具有更大的ttp。如果产品的数量大于一个并且该产品的馈送线160的数量与馈送线160中的产品的数量相同,则馈送线160的pt与组装线150的pt相同。当不需要将馈送产品供应到组装线150时,则馈送线160的pt是可变的。
108.在馈送线160处,附加工位在处理方向199上在子组件162的脉动之间的暂停期间对子组件162执行作业。一些子组件162可以以连续的非脉动、非微脉动方式生产。方法1400包括将子组件162-1以及与子组件162-1并行产生的子组件162-n准时递送1404到工位152-2。子组件162按照使用顺序被准时(jit)递送到工位。方法1400包括将子组件162-n接合1406到子组件162-1以形成组件170-1。在一个实施方式中,子组件162是机身的一部分(例如,上半筒部分126或下半筒部分128)。在进一步的实施方式中,组件170-1是由上半筒部分126和下半筒部分128形成的全筒部分44)。
109.在另外的实施方式中,方法1400还包括经由多于一个工位152同时对子组件162执行作业。根据实施方式,行进包括使子组件162迭代地脉动小于其长度,然后在对子组件162执行作业的同时暂停。另选地,行进包括使子组件162迭代地脉动至少其长度,然后在对子组件162执行作业的同时暂停。另选地,前进包括在对子组件162执行作业的同时连续地移动子组件162。在脉动的实施方式中,第一类型的子组件162-1和第二类型的子组件162-n在脉动之后在工位152处被加入组件170中。
110.现在将注意力转向图9,其概括地示出执行连续制造的生产系统(例如,组装环境100)的控制组件。控制器1600协调并控制工位1620沿着具有动力系1662的移动线1660的操作(对应于任何和所有工位以及本文描述的一个或更多个飞机组件的移动)。控制器1600可以包括与存储程序1614的存储器1612联接的处理器1610。在一个示例中,移动平台1670沿着由动力系1662连续驱动的移动线1660被驱动,动力系1662由控制器1600控制。在该示例中,移动平台1670包括公用设施连接件1672,该公用设施连接件可包括将移动平台1670与外来公用设施联接的电气、气动和/或液压快速断开连接件。在其它示例中,如前所述,移动
平台1670包括包含机载公用设施的自动化引导车辆(agv)以及gps/自动引导系统1674。移动平台1670还包括先前讨论的转位系统、条形码和rfid系统中的一些或全部。在又一些示例中,使用激光跟踪器1650来控制移动平台1670的移动。激光跟踪器1650使用转位组件、条形码读取器或rfid读取器。与控制器1600联接的位置和/或运动传感器1630用于确定移动平台1670以及动力系1662的位置。
111.图10是图5中描绘的流程图。冠部模块364通过微脉动129-4前进通过工位720-1至750,以到达冠部模块364的组装台320、321,以便在全脉动长度123内安装到上半筒部分116、126中。冠部模块364与上半筒部分116、126并联组装,使得冠部模块364完成或几乎完成安装,以使上半筒部分116、126处于组装台320的时间最小化。用于冠部模块364的馈送线773将其准时提供至组装台320、321并且准备好安装到上半筒部分116、126中。冠部模块364被反转组装。冠部模块364到达组装台320、321,准备完成安装或几乎完成安装。
112.在图10的方法中,馈送线722-1、722-2将天花龙骨材料732-2jit馈送2002到工位720-1、720-2以便接合到天花龙骨中。在进行微脉动通过工位720-1、720-2时,将天花龙骨和所提供的天花龙骨材料接合2004。
113.在微脉动之后或期间将天花龙骨/冠部模块或组件转位2006至每个工位以便在该工位的范围内传送3d表征。在图5中,微脉动129-4被示出为具有等于两个相邻工位之间的空间的长度或等于范围774或其多倍或分数的长度。在冠部模块364的微脉动129-4之间的暂停期间和/或微脉动129-4期间,随着冠部模块364前进通过地板龙骨馈送线、馈送线773,工位720-1、720-2、730、740、760-1、760-2和750转位2006到冠部模块364。冠部模块364以单个或多个被转位2006至连续布置的工位720-1、720-2、730、740、760-1、760-2和750中的每个,以在工位720-1、720-2、730、740、760-1、760-2和750对冠部模块364进行作业之前在每个工位720-1、720-2、730、740、760-1、760-2和750的范围774内传送冠部模块364的3d表征。
114.一个或更多个工位720-1、720-2、730、740、760-1、760-2和750在微脉动129-4之间的暂停期间和/或在微脉动129-4期间对冠部模块364执行作业。转位特征704(图4中示出)可位于本文所述的组成冠部模块364的多个组件上或位于传送冠部模块364的可移动夹具的多个部分上。冠部模块364与上半筒部分116、126并联组装,并且jit到达组装台320、321以用于安装到上半筒部分116、126中。
115.冠部模块364通过微脉动129-4经过连续布置的工位720-1、720-2、730、740、760-1、760-2和750在馈送线773(分别jit递送绝缘件731、仅右装载箱、电气和照明系统761-1、761-2并且然后天花板751以用于组装到冠部模块364的关联馈送线722-1、722-2、732、742、762-1、762-2和752)上继续组装。
116.继续该流程图,天花龙骨被微脉动2008至绝缘件附接工位730,该绝缘件附接工位在天花龙骨上安装由馈送线732馈送至绝缘件附接工位730中的绝缘件731,而上游工位继续将天花龙骨材料接合到天花龙骨中。
117.天花龙骨被微脉动2010至装载箱附接工位740,并且馈送线742将装载箱741馈送至同一工位,其中,在上游工位(例如,720-1、720-2、730)继续接合天花龙骨材料并将绝缘件放置到天花龙骨中时,装载箱741、紧固件以及其它需要的材料在装载箱附接工位740内被附接到天花龙骨和绝缘组件上。
118.具有绝缘件和装载箱的天花龙骨被微脉动2012至照明附接工位760-1,以在照明
附接工位760-1内将馈送线762-1馈送的照明和其它所需材料附接至天花龙骨、绝缘件和装载箱组件,同时上游工位(例如,720-1、720-2、730、740)继续将天花龙骨材料与绝缘件和装载箱接合到天花龙骨中。由于电气和照明的安装可能花费更长时间,所以工位760-2也被并入,每次都发生微脉动2012。
119.接下来,冠部模块的天花龙骨、绝缘件、装载箱以及照明组件被微脉动至天花板附接工位750,以在天花板附接工位750处将馈送线752馈送的天花板751附接至天花龙骨、绝缘件和装载箱,以在天花板附接工位内将馈送线馈送的天花板和其它所需材料附接到天花龙骨、绝缘件、装载箱和天花板面面板组件,同时如果需要,上游工位(例如,720-1、720-2、730、740、760-1、760-2)继续将天花龙骨材料与绝缘件和装载箱以及照明一起加入天花龙骨内。
120.冠部模块364被完全脉动2018到组装台320、321以用于安装到上半筒部分116、126-1中。可选地,不具有天花板的冠部模块364不经过天花板安装,而是直接前进到组装台320。
121.最后,在不具有天花板的情况下,天花板模块364被完全脉动2020到组装台320、321,其中,天花板被jit传送到组装台320、321,并且在冠部模块364安装到上半筒部分116、126期间添加天花板。
122.图11是示出了在示例性实施方式中的制造机架的多个部分(例如,全筒部分)的方法的流程图2100。图示的方法包括在沿着组装线110、120以小于下半筒部分118、128的长度间隔开的多个工位114、124处在处理方向199上对下半筒部分118、128连续执行2122作业。该方法还包括在处理方向199上在下半筒部分118、128之后对上半筒部分116、126连续执行2124作业。从组装线110、120移除2126下半筒部分118、128。随后,从组装线110、120移除2128上半筒部分116、126。最后,下半筒部分118、128被附接2130到上半筒部分116、126。
123.图中所示或本文所述的多种控制元件(例如,电气或电子组件)中的任一者可实现为硬件、实现软件的处理器、实现固件的处理器或这些的一些组合。例如,元件可以实现为专用硬件。专用硬件元件可被称为“处理器”、“控制器”或一些类似的术语。当由处理器提供时,功能可以由单个专用处理器、由单个共享处理器或由多个单独处理器提供,其中一些处理器可以被共享。此外,术语“处理器”或“控制器”的明确使用不应被解释为排他地指能够执行软件的硬件,并且可以隐含地包括但不限于数字信号处理器(dsp)硬件、网络处理器、专用集成电路(asic)或其它电路、现场可编程门阵列(fpga)、用于存储软件的只读存储器(rom)、随机存取存储器(ram)、非易失性存储、逻辑或一些其它物理硬件组件或模块。
124.而且,控制元件可以被实现为由处理器或计算机可执行的指令,以执行元件的功能。指令的一些示例是软件、程序代码和固件。指令在由处理器执行时可操作以指导处理器执行元件的功能。指令可被存储在处理器可读的存储设备上。存储设备的一些示例是数字或固态存储器、诸如磁盘和磁带的磁存储介质、硬盘驱动器、或光学可读数字数据存储介质。
125.虽然本文描述了特定实施方式,但是本公开的范围不限于那些特定实施方式。本公开的范围由所附权利要求限定。
126.以下说明性条款还可以有助于理解本公开。
127.条款
128.1.一种用于制造冠部模块(364)的方法,所述方法包括:
129.在处理方向(199)上使天花龙骨脉动;
130.向执行所述冠部模块(364)的组装的多个工位(152)准时提供用于所述冠部模块(364)的附加组件(162);以及
131.在脉动之间的暂停期间操作所述工位(152)以组装所述冠部模块(364)。
132.2.根据条款1所述的方法,所述方法还包括:将冠部模块(364)安装到机身(12)的上半筒部分(116、126)中。
133.3.根据条款1或2所述的方法,所述方法还包括:在暂停期间将天花龙骨转位到工位(152)。
134.4.根据前述条款中任一项所述的方法,所述方法还包括:同时操作多个所述工位(152)以用于组装单个冠部模块(364)。
135.5.根据前述条款中任一项所述的方法,其中,在处理方向(199)上使天花龙骨脉动的步骤包括:经由脉动123使天花龙骨前进小于其长度通过工位(152),其中,工位(152)在组装之前转位到天花龙骨。
136.6.根据前述条款中任一项所述的方法,其中,提供用于所述冠部模块(364)的附加组件的步骤包括:经由与每个工位(152)相关联的馈送线(160)将附加冠部模块组件馈送到工位(152)。
137.7.一种用于组装飞机(10)的方法,所述方法包括:
138.接收机身(12)的处于冠部向上取向的上半筒部分(116、126);以及
139.将冠部模块(364)、优选地根据前述条款中任一项所述的方法制造的冠部模块安装到所述上半筒部分(116,126)中。
140.8.根据条款7所述的方法,其中,安装所述冠部模块(364)的步骤包括:安装冠部模块(364),冠部模块(364)的长度基本上等于机身(12)的所述上半筒部分(116、126)的长度。
141.9.根据条款7或8所述的方法,其中,将所述冠部模块(364)安装到所述上半筒部分(116、126)中的步骤包括:将所述冠部模块(364)以完成状态安装到所述上半筒部分(116、126)中。
142.10.根据条款7至9中任一项所述的方法,所述方法还包括:在全脉动(123)的组装线(150)中制造所述冠部模块(364)。
143.11.根据条款10所述的方法,所述方法包括:横跨一系列连续布置的工位(152)制造冠部模块(364),每个工位之间具有全脉动(123)。
144.12.根据条款11所述的方法,所述方法还包括:使用针对与所述工位(152)相关联的转位组件(718)的、与所述冠部模块(364)相关联的转位特征(704),将所述冠部模块(364)转位到工位(152)。
145.13.根据条款10-12中任一项所述的方法,其中,制造所述冠部模块(364)包括:
146.在冠部模块龙骨工位(720)处将天花龙骨组件(721)组装到天花龙骨中;
147.在绝缘件附接工位(730)处将绝缘件(731)安装到所述天花龙骨上;
148.在装载箱附接工位(740)处将装载箱(741)安装到所述天花龙骨上;
149.在天花板附接工位(750)处将天花板(751)安装到所述天花龙骨上;以及
150.在照明附接工位(760)处将照明组件(761)安装到所述天花龙骨上。
151.14.根据条款10至13中任一项所述的方法,所述方法还包括:使用馈送线(160)将所述冠部模块(364)的组件提供至所述工位(152)。
152.15.根据条款10至14中任一项所述的方法,所述方法还包括:使冠部模块(364)微脉动(129)通过工位(152)。
153.16.根据条款10至15中任一项所述的方法,其中,制造所述冠部模块(364)的步骤还包括:
154.使天花龙骨在处理方向(199)上前进;以及
155.将绝缘件(731)安装到所述天花龙骨上。
156.17.根据条款10至16中任一项所述的方法,其中,制造所述冠部模块(364)还包括:
157.使天花龙骨在处理方向(199)上前进;以及
158.将多个装载箱(741)安装到所述天花龙骨上。
159.18.根据条款10至17中任一项所述的方法,其中,制造所述冠部模块(364)的步骤还包括:
160.使天花龙骨在处理方向(199)上前进;以及
161.将天花板(751)安装到所述天花龙骨上。
162.19.根据条款10至18中任一项所述的方法,其中,制造所述冠部模块(364)的步骤还包括:
163.使天花龙骨在处理方向(199)上前进;以及
164.将照明(761)安装到所述天花龙骨上。
165.20.根据前述条款中任一项所述的方法组装的飞机(10)的一部分。
166.21.一种系统,所述系统包括:
167.多个工位(720、730、740、750、760),所述多个工位将冠部模块组件安装到天花龙骨上;
168.轨道(773),所述轨道使所述天花龙骨在处理方向(199)上前进通过所述工位(720、730、740、750、760);以及
169.至少一条馈送线(722、732、742、752、762),所述至少一条馈送线(722、732、742、752、762)与所述工位(720、730、740、750、760)中的一个相关联,所述馈送线(722、732、742、752、762)可操作地向所述工位(720、730、740、750、760)准时提供冠部模块组件以用于安装到所述天花龙骨上。
170.22.根据条款21所述的系统,其中:
171.所述工位(720、730、740、750、760)中的至少一个是冠部模块龙骨工位(720);以及
172.所述馈送线(722)将天花龙骨组件(721)提供给所述冠部模块龙骨工位(720)以用于制造成天花龙骨。
173.23.根据条款21或22所述的系统,其中:
174.所述工位(720、730、740、750、760)中的至少一个是绝缘件附接工位(730);以及
175.所述馈送线(732)向所述绝缘件附接工位(730)提供绝缘件(731)以用于附接至所述天花龙骨。
176.24.根据条款21至23中任一项所述的系统,其中:
177.所述工位(720、730、740、750、760)中的至少一个是装载箱工位(740);以及
178.所述馈送线(742)向所述装载箱工位(740)提供装载箱组件(741)以用于附接至所述天花龙骨。
179.25.根据条款21至24中任一项所述的系统,其中:
180.所述工位(720、730、740、750、760)中的至少一个是天花板工位(750);以及
181.所述馈送线(752)向所述天花板工位(750)提供天花板组件(751)以用于附接到所述天花龙骨。
182.26.根据条款21至25中任一项所述的系统,其中:
183.所述工位(720、730、740、750、760)中的至少一个是照明附接工位(760);以及
184.所述馈送线(762)向所述照明附接工位(760)提供照明组件(761)以用于附接至所述天花龙骨。
185.27.根据条款21至28中任一项所述的系统,其中,所述工位(720、730、740、750、760)中的至少两个可操作为将冠部模块组件同时附接到天花龙骨上。
186.28.根据条款21至27中任一项所述的系统,所述系统还包括组装台(320、321),其中,已完成的冠部模块(364)被附接到上半筒部分(116、126)的冠部。
187.29.根据条款21至28中的任一项所述的系统,所述系统还包括与多个工位(720、730、740、750、760)中的每个工位相关联的转位组件(718),所述转位组件(718)能够操作为与所述天花龙骨相关联的转位特征(704)对接,以控制所述天花龙骨相对于所述工位(720、730、740、750、760)的位置。
188.30.一种使用条款21至29中任一项的系统制造飞机(10)的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
