1.本发明涉及水下机器人领域,特别涉及一种船舶外壁水下清洗机器人。
背景技术:
2.随着海洋经济时代的到来,船舶作为海上航行不可或缺的工具,船体保护问题逐渐得到人们的重视,船体表面常年浸泡在海洋,海水中富含矿物质及盐分腐蚀性较强,且海洋中的生物附着能力强,因此常年行驶在海平面以下的船体都会粘附大量的海洋生物及污物,大大增加船舶阻力,增加额外油耗,严重耽误航期,增大运营成本,缩短船舶服务寿命。
3.由于船体表面附着物坚硬、厚度大,所以大多采用高压水喷射装置清洗,容易去除表面防锈材料;三是船体外壁附着物的清除方式主要是人工作业,由于高压水射流冲击力较大,出水压力约为75~100mpa,对潜水员的自身安全造成一定的威胁。为提高水下清洗作业的工作效率,研发一套专业的水下清洗装置,代替人工进行水下作业十分必要。
技术实现要素:
4.本发明的目的是提供一种船舶外壁水下清洗机器人,其通过机器人平台搭载清洗刷组件作为初步清洗手段,搭载空泡装置作为初步清洗无效后的二次清洗手段,以实现船舶外表面的清洗。
5.本发明的技术方案是,提供一种船舶外壁水下清洗机器人,其包括:
6.机器人主体;
7.清洗刷组件,通过机械臂安装在所述机器人主体的前端;
8.摄像头,用于拍摄所述清洗刷组件的清洗范围;
9.空泡装置,设置在所述机器人主体的内部,通过安装在所述机器人主体前端的推进喷嘴向所述清洗范围发射高压空泡;
10.喷涂组件,用于在清洗完成后船舶外壁的涂层损坏时对清洗完成的区域进行喷涂;
11.四个永磁万向轮组件,分别设置在所述机器人主体的底部两侧,用于吸附在船舶外壁,并带动所述机器人主体移动。
12.本发明的进一步改进在于,所述机器人主体的后端设置有螺旋桨。
13.本发明的进一步改进在于,所述永磁万向轮组件采用球形轮,所述球形轮的表面嵌设有永磁体。
14.本发明的进一步改进在于,所述清洗刷组件包括具有驱动电机的刷头底座以及两个圆盘刷头。
15.本发明的进一步改进在于,所述空泡装置包括依次连接的空泡发生器、空泡充气瓶以及水压装置;空泡发生器用产生空泡,空泡充气瓶用于收集并存储空泡,水压装置用于对空泡与水混合的空泡水流加压,使得其从推进喷嘴喷出。
16.本发明的进一步改进在于,所述喷涂组件包括旋转驱动机构、沿所述机器人主体
前后方向设置的伸缩臂、连接块、电动推杆以及喷涂箱体;其中:
17.所述旋转驱动机构固定在所述机器人主体上,其输出轴与所述伸缩臂的第一端转动,用于带动所述伸缩臂沿其轴线方向转动;
18.所述伸缩臂的第二端以及所述电动推杆的第一端均与所述连接块固定连接;所述电动推杆与所述伸缩臂的轴线垂直;
19.所述喷涂箱体固定设在所述电动推杆的底端;其内部设置有喷嘴。
20.本发明的有益效果为:机器人的永磁万向轮组件采用镶嵌永磁铁的球形轮,具备全向移动能力,且可以适应不同曲率半径的船舶表面。机器人首先采用清洗刷,再采用空泡装置,可降低船舶外壁涂层的损耗。通过配置喷涂组件可以在涂层损耗后及时进行修补喷涂,避免海水对涂层损坏处进行腐蚀。
附图说明
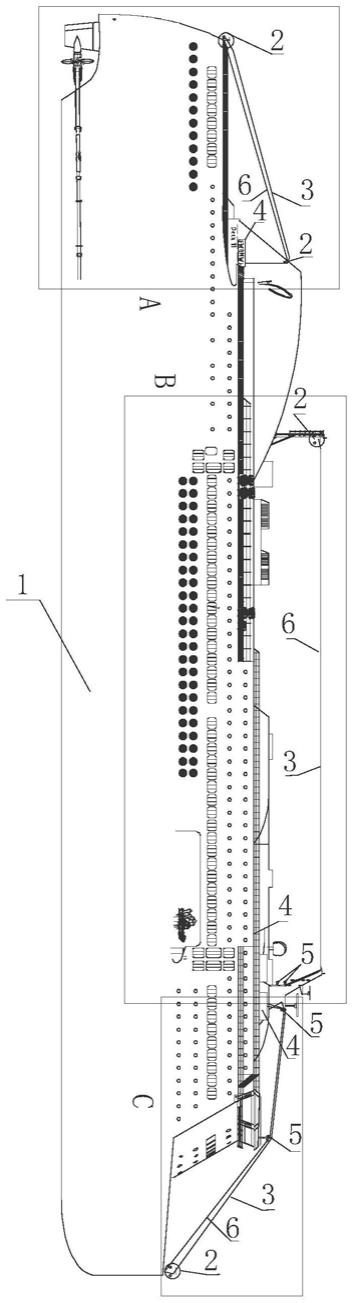
21.图1为本发明船舶外壁水下清洗机器人的立体视图;
22.图2为空泡装置的示意图;
23.图3为本发明的船舶外壁水下清洗机器人的工作流程图;
24.图4为喷涂箱体上的喷嘴的结构示意图。
具体实施方式
25.实施例:如图1所示,本实施例提供一种船舶外壁水下清洗机器人,其包括:机器人主体33、清洗刷组件、摄像头2、空泡装置、喷涂组件以及永磁万向轮组件。机器人主体33通过永磁万向轮组件吸附在船舶的外壁并在外壁进行行走。
26.机器人主体33的前端顶部设置有支撑底座1。支撑底座1上设置有机械臂3,清洗刷组件安装在机械臂3的末端。清洗刷组件用于船舶外壁进行清扫。
27.在一个具体实施例中,清洗刷组件包括具有驱动电机的刷头底座5以及两个圆盘刷头6。驱动电机用于带动两个圆盘刷头6转动,以便对船舶外壁进行清洗。
28.摄像头2安装在支撑底座1上,摄像头2用于拍摄清洗刷组件的清洗范围,并判定船体船舶表面的清洗范围是否已经清洗干净以及清洗区域的涂层是否损坏。在机器人主体33行进过程中,摄像头还用于实时监控船体外壁环境情况。
29.空泡装置设置在机器人主体33的内部,通过安装在机器人主体33前端的推进喷嘴20向所述清洗范围发射高压空泡,以便对清洗刷组件没有清理掉的污染物进行清理。如图2所示,在一个具体实施例中,空泡装置包括依次连接的空泡发生器23、空泡充气瓶22以及水压装置21;空泡发生器23用产生空泡,空泡充气瓶22用于收集并存储空泡,水压装置21用于对空泡与水混合的空泡水流加压,使得其从推进喷嘴20喷出,以清理船舶外壁。
30.机器人主体1的后端设置有螺旋桨19,机器人主体33可通过该螺旋桨在水中移动。或者产生推力,抵消清洗过程中的反作用力。四个永磁万向轮组件分别设置在所述机器人主体33的底部两侧,用于吸附在船舶外壁,并带动所述机器人主体33移动。
31.每个永磁万向轮组件采用球形轮9,球形轮9的表面嵌设有永磁体。球形轮9的主体容纳在车轮底座8中。在车轮底座8中设置有至少三个电动滚轮,以推动球形轮9按照任意的预期的方向转动。
32.喷涂组件用于在清洗完成后船舶外壁的涂层损坏时对清洗完成的区域进行喷涂;喷涂组件包括旋转驱动机构、沿所述机器人主体33前后方向设置的伸缩臂14、连接块13、电动推杆12以及喷涂箱体11;其中:所述旋转驱动机构固定在所述机器人主体33上,其输出轴与所述伸缩臂14的第一端转动,用于带动所述伸缩臂14沿其轴线方向转动;所述伸缩臂14的第二端以及所述电动推杆12的第一端均与所述连接块13固定连接;所述电动推杆12与所述伸缩臂14的轴线垂直;所述喷涂箱体11固定设置在所述电动推杆12的底端;其内部设置有向下的喷嘴10。
33.喷涂过程中,旋转驱动机构带动伸缩臂14转动,从而带动电动推杆12摆动。在此过程中配合电动推杆12的伸缩过程使得喷涂箱体11的底面与船舶表面贴合以便在船体表面喷涂涂料。电动推杆12在一次摆动过程中喷涂箱体11 会在船体表面留下条形的线性喷涂区。电动推杆12完成一次摆动之后控制伸缩臂14进行步进伸缩,并控制电动推杆12摆动,驱动喷涂箱体11形成下一个线性喷涂区。电动推杆12多次摆动并配合伸缩臂14步进伸缩过程,喷涂箱体 11即可对特定的目标区域进行喷涂覆盖。
34.本实施例中喷涂箱体11采用湿法水下等离子喷涂原理进行喷涂。喷涂箱体 11的喷嘴的截面如图4所示,喷嘴40呈喇叭状,其内部可喷出炙热的离子流,将喷嘴40内部的水流排出,形成一个局部干燥气相区。在喷嘴40与船体41接触的边缘设置有若干个缺口作为排水排气的通道。喷嘴40的侧向设置有送粉口 42,用于向喷嘴40内部供应喷涂粉料,喷涂粉料包括:用作打底涂层的铝包镍复合粉(加入难熔金属硅化物,增强涂层的结合强度,提高深层抗氧化)以及陶瓷基防腐涂层。铝包镍复合粉打底的优点是铝和镍能产生强烈的放热反应,生成金属间氧化物,提高了与船体表面的结合强度。
35.在喷涂过程中,先向喷嘴40中送入ar气,随后通过送粉口42送入喷涂粉料,以防止海水进入送粉通道;然后进行引弧,利用高温离子气流使保护罩内的海水迅速气化,海水瞬间被排空,形成局部干燥气相区,随着喷嘴移动,喷涂点始终处于局部干燥气相区。喷涂过程中先喷涂打底涂层,再喷涂陶瓷基防腐涂层。
36.本实施例中,旋转驱动机构包括圆盘齿轮底座15、轴承底座16、齿轮系17 以及电机18。齿轮系17安装在圆盘齿轮底座15以及轴承底座16之间,用于在电机18以及伸缩臂14之间传动。
37.如图1、3所示,本发明的船舶外壁水下清洗机器人的具体工作过程为:控制系统初始化,上位机发出信号,启动摄像头2,控制系统判断当前位置是否需要清理,当不需要清理时,摄像头开始检测是否需要涂层,否则,控制系统开始控制清洗刷组件工作,两个圆盘刷头开始旋转清理工作范围内的船体外壁附着物,一个工作周期结束后,圆盘刷头停止旋转,摄像头开始检测船体外壁是否清理干净,当船体外壁未清理干净时,空泡装置开始工作,空泡发生器产生空泡,空泡流向空泡充气瓶被收集与储存,空泡储存充足后,水冲压装置对空泡水流进行加压,推进喷嘴向目标点发射高压空泡,一个工作周期结束后,摄像头开始检测船体外侧是否清理干净,当检测结果为清理干净时,摄像头开始检测船体外壁是否需要重新涂层,当结果为是时,喷涂组件开始工作,电机开机,带动齿轮转动,齿轮带动伸缩臂,伸缩臂通过连接块带动电动推杆,电动推杆通过箱体,带动喷嘴进行涂层喷射,一个工作周期结束后,驱动电机关机,清洗机器人继续向前移动。
38.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无
需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。