kdcx断路器激光封焊设备
技术领域
1.本实用新型属于断路器加工技术领域,具体涉及一种kdcx断路器激光封焊设备。
背景技术:
2.断路器是指能够关合、承载和开断正常回路条件下的电流并能在规定的时间内关合、承载和开断异常回路条件下的电流的开关装置,断路器按其使用范围分为高压断路器与低压断路器,高低压界线划分比较模糊,一般将3kv以上的称为高压电器,由于电子产品行业高速发展,促使电子产品行业满足市场需求,为满足新产品生产需求,断路器需求大幅增加。
3.断路器焊接加工是断路器生产的必要工序,目前激光焊接技术应用非常广泛,涉及领域有制造业、汽车工业、电子行业、生物医学等,激光焊接是利用高能量的激光脉冲对材料进行微小区域的局部加热,激光辐射的能量通过热传导向材料的内部扩散,将材料熔化后形成特定熔池,激光焊接是一种新型的焊接方式,激光焊接主要针对薄壁材料、精密零件的焊接,可实现点焊、对接焊、叠焊、密封焊等,深宽比高,焊接宽度小,热影响区小、变形小,焊接速度快,焊缝平整、美观,焊接后无需处理或者只需简单处理即可,焊接质量高,无气孔,可精确控制,聚焦光点小,定位精度高,易实现自动化。
4.但是,传统的断路器件在进行激光焊接时,自动化程度以及焊接效率不高,易出现漏焊以及焊接品质差的问题。
技术实现要素:
5.为解决现有技术中存在的上述问题,本实用新型提供了一种kdcx断路器激光封焊设备,具有使用方便、自动化程度高、焊接效率高以及焊接品质高的特点。
6.为实现上述目的,本实用新型提供如下技术方案:kdcx断路器激光封焊设备,包括下机架以及安装在所述下机架顶端的上机架,在所述下机架内安装有激光器,在所述下机架一侧配置有用于对所述激光器进行水冷的冷水机,在所述上机架上分别安装有三色灯和显示屏,还包括产品取放机构、焊接移动平台、悬浮焊接组件、用于装载产品以进行输送的随行工装及顶升缓存机构,所述下机架上还分别安装有用于输送装载有产品的随行工装以及运回空随行工装的产品输送线和治具回流线;所述产品取放机构安装在所述下机架顶部用于取下经所述产品输送线输送而至的产品,所述顶升缓存机构安装在所述下机架上且处在所述产品取放机构下方用于顶起到位的随行工装以供所述产品取放机构夹取随行工装上的产品,所述焊接移动平台安装在所述下机架顶部用于接收从所述产品取放机构取下的待焊接产品并将待焊接产品运送至所述悬浮焊接组件处进行激光焊接;还包括氩气瓶和吸烟机,且所述氩气瓶与所述吸烟机分别利用软管接至所述焊接移动平台和所述悬浮焊接组件。
7.作为本实用新型的一种优选技术方案,所述产品取放机构包括支架、拖链、产品取放y轴模组、产品取放x轴模组、滑座、产品取放z轴模组和产品取放气动夹爪,所述支架安装
在所述下机架顶部,所述拖链安装在所述支架顶端,且所述拖链的一端与所述产品取放x轴模组连接,所述产品取放y轴模组安装在所述支架上,所述产品取放x轴模组安装在所述产品取放y轴模组的滑块上,所述滑座安装在所述产品取放x轴模组的滑块上,所述产品取放z轴模组安装在所述滑座上,所述产品取放气动夹爪安装在所述产品取放z轴模组的滑块上。
8.作为本实用新型的一种优选技术方案,所述顶升缓存机构包括顶升气缸、支撑柱和产品级数检测光电传感器,两组所述支撑柱安装在所述下机架顶面并关于所述产品输送线对称分布,所述产品级数检测光电传感器安装在所述支撑柱顶端,所述顶升气缸安装在所述下机架内,且所述顶升气缸的活塞杆贯穿所述产品输送线用于顶起到位的随行工装供所述产品级数检测光电传感器对产品的级数进行检测;在所述下机架内还分别安装有处在所述顶升气缸两侧的第一阻挡气缸和第二阻挡气缸,在所述下机架内靠近产品输送线进料端的位置安装有分料气缸。
9.作为本实用新型的一种优选技术方案,所述随行工装包括治具底板,在所述治具底板顶面具有多个用于放置产品的放置位,在所述治具底板的顶面还安装有方向防错销钉;在所述治具底板的端面分别安装有摩擦板和聚氨酯缓冲垫。
10.作为本实用新型的一种优选技术方案,所述焊接移动平台包括焊接移动x轴模组、焊接移动y轴模组和产品焊接定位夹具,所述焊接移动y轴模组安装在所述下机架顶部,所述焊接移动x轴模组安装在所述焊接移动y轴模组的滑块上,所述产品焊接定位夹具安装在所述焊接移动x轴模组的滑块上。
11.作为本实用新型的一种优选技术方案,所述产品焊接定位夹具包括工位盒、产品一号夹紧气缸、产品二号夹紧气缸和限位气缸,所述工位盒安装在所述焊接移动x轴模组的滑块上,所述工位盒内为装载待焊接产品的工位槽,所述产品一号夹紧气缸、所述产品二号夹紧气缸以及所述限位气缸均安装在所述工位盒外壁用于向内侧夹紧待焊接产品;在所述工位盒上还连接有清理吹气口。
12.作为本实用新型的一种优选技术方案,所述悬浮焊接组件包括背板、产品焊接z轴模组和自带相机焊接头,所述背板安装在所述下机架顶面,所述产品焊接z轴模组安装在所述背板上,所述自带相机焊接头安装在所述产品焊接z轴模组的滑块上;在所述背板上还安装有吸烟管接口钣金,所述吸烟机利用软管接至所述吸烟管接口钣金。
13.与现有技术相比,本实用新型的有益效果是:本实用新型的断路器激光封焊设备,与产品装配线配合使用,使其装配更加快速便捷;焊接过程无需人工参与,产品自动上下料,解决了人工放产品时位置偏移及人员伤害等问题;采用伺服丝杆模组移动定位,移动速度快,定位准确,产品焊接效果误差减小,提高了生产效率;采用激光焊接提高了焊接的速度,节省了人力,设备操作和维修简便;焊接处设有排烟管,排烟管另一端接有烟雾处理装置吸烟机,减少了对环境的污染。
附图说明
14.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
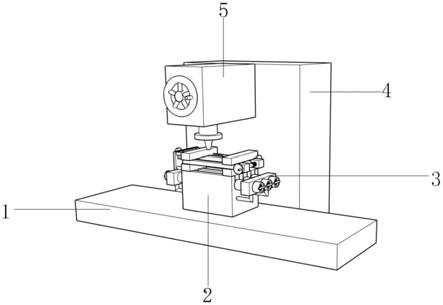
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中的下机架轴侧结构示意图;
17.图3为本实用新型中的机构总成轴侧结构示意图;
18.图4为本实用新型中的产品取放机构轴侧结构示意图;
19.图5为本实用新型中的顶升缓存机构轴侧结构示意图;
20.图6为本实用新型中的随行工装轴侧结构示意图;
21.图7为本实用新型中的焊接移动平台轴侧结构示意图;
22.图8为本实用新型中的产品焊接定位夹具轴侧结构示意图;
23.图9为本实用新型中的悬浮焊接组件轴侧结构示意图;
24.图中:1、下机架;2、上机架;3、氩气瓶;4、冷水机;5、三色灯;6、显示屏;7、激光器;8、吸烟机;9、产品输送线;10、治具回流线;11、产品取放机构;111、支架;112、拖链;113、产品取放y轴模组;114、产品取放x轴模组;115、滑座;116、产品取放z轴模组;117、产品取放气动夹爪;12、焊接移动平台;121、焊接移动x轴模组;122、焊接移动y轴模组;123、产品焊接定位夹具;1231、工位盒;1232、工位槽;1233、产品一号夹紧气缸;1234、产品二号夹紧气缸;1235、限位气缸;1236、清理吹气口;13、悬浮焊接组件;131、背板;132、产品焊接z轴模组;133、自带相机焊接头;134、吸烟管接口钣金;14、随行工装;141、治具底板;142、摩擦板;143、方向防错销钉;144、聚氨酯缓冲垫;15、顶升缓存机构;151、顶升气缸;152、支撑柱;153、产品级数检测光电传感器;154、第一阻挡气缸;155、第二阻挡气缸;156、分料气缸。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1-图9,本实用新型提供以下技术方案:kdcx断路器激光封焊设备,包括下机架1以及安装在下机架1顶端的上机架2,在下机架1内安装有激光器7,在下机架1一侧配置有用于对激光器7进行水冷散热的冷水机4,在上机架2上分别安装有三色灯5和显示屏6,显示屏6能够显示焊接状态,还包括产品取放机构11、焊接移动平台12、悬浮焊接组件13、用于装载产品以进行输送的随行工装14及顶升缓存机构15,下机架1上还分别安装有用于输送装载有产品的随行工装14以及运回空随行工装14的产品输送线9和治具回流线10;产品取放机构11安装在下机架1顶部用于取下经产品输送线9输送而至的产品,顶升缓存机构15安装在下机架1上且处在产品取放机构11下方用于顶起到位的随行工装14以供产品取放机构11夹取随行工装14上的产品,焊接移动平台12安装在下机架1顶部用于接收从产品取放机构11取下的待焊接产品并将待焊接产品运送至悬浮焊接组件13处进行激光焊接;还包括氩气瓶3和吸烟机8,且氩气瓶3与吸烟机8分别利用软管接至焊接移动平台12和悬浮焊接组件13,设备整体采用下机架1与上机架2的两段式机体,待焊接的产品放置在随行工装14上利用产品输送线9进行输送,到达固定位置后,通过顶升缓存机构15顶起随行工装14,并对后方的随行工装14进行缓存限制,保证在焊接下一产品时只允许一块随行工装14流向顶升缓存机构15的位置,顶升缓存机构15顶起随行工装14期间会对产品级数进行检测,产品取放机构11在产品级数确认后动作,将产品取至焊接移动平台12处,焊接移动平台12对待焊接产品进行定位,使产品对应悬浮焊接组件13,最终实现焊接,在焊接完成后,各组件复
位,产品取放机构11再将焊接后的产品放回随行工装14,随行工装14拖动产品运输至下一工序或工位,然后进行循环焊接下一个产品。
27.具体的,根据附图1、附图2、附图3和附图4所示,本实施例中,产品取放机构11包括支架111、拖链112、产品取放y轴模组113、产品取放x轴模组114、滑座115、产品取放z轴模组116和产品取放气动夹爪117,支架111安装在下机架1顶部,拖链112安装在支架111顶端,且拖链112的一端与产品取放x轴模组114连接,产品取放y轴模组113安装在支架111上,产品取放x轴模组114安装在产品取放y轴模组113的滑块上,滑座115安装在产品取放x轴模组114的滑块上,产品取放z轴模组116安装在滑座115上,产品取放气动夹爪117安装在产品取放z轴模组116的滑块上,在产品级数确认后,产品取放y轴模组113、产品取放x轴模组114动作,使产品取放气动夹爪117移动到产品上方,产品取放z轴模组116动作下降产品取放气动夹爪117,利用产品取放气动夹爪117夹住产品,之后产品取放z轴模组116缩回,产品取放y轴模组113、产品取放x轴模组114重新动作,将产品搬运至焊接移动平台12处。
28.具体的,根据附图1、附图2、附图3和附图5所示,本实施例中,顶升缓存机构15包括顶升气缸151、支撑柱152和产品级数检测光电传感器153,两组支撑柱152安装在下机架1顶面并关于产品输送线9对称分布,产品级数检测光电传感器153安装在支撑柱152顶端,顶升气缸151安装在下机架1内,且顶升气缸151的活塞杆贯穿产品输送线9用于顶起到位的随行工装14供产品级数检测光电传感器153对产品的级数进行检测;在下机架1内还分别安装有处在顶升气缸151两侧的第一阻挡气缸154和第二阻挡气缸155,在下机架1内靠近产品输送线9进料端的位置安装有分料气缸156,在产品输送线9两侧还安装了到位检测光电传感器,在附图5中已示出,产品到达此位置后,检测光电传感器接收到到位信号,对系统发送指令,顶升气缸151动作顶起随行工装14,将随行工装14顶至取料位置,产品级数检测光电传感器153检测待焊接产品的产品级数,第二阻挡气缸155动作将后面的随行工装14阻挡,当此处留有两块及以上随行工装14时,分料气缸156动作,顶起后方的随行工装14,保证在焊接下一产品时只允许一块随行工装14流向顶升缓存机构15的位置。
29.具体的,根据附图1、附图2、附图3和附图6所示,本实施例中,随行工装14包括治具底板141,在治具底板141顶面具有多个用于放置产品的放置位,本实施例为三个,在治具底板141的顶面还安装有方向防错销钉143;在治具底板141的端面分别安装有摩擦板142和聚氨酯缓冲垫144,待焊接的产品分别放置到治具底板141的放置位内,利用方向防错销钉143确定治具底板141的摆放方向后将治具底板141放置到产品输送线9上进行输送。
30.具体的,根据附图1、附图2、附图3和附图7所示,本实施例中,焊接移动平台12包括焊接移动x轴模组121、焊接移动y轴模组122和产品焊接定位夹具123,焊接移动y轴模组122安装在下机架1顶部,焊接移动x轴模组121安装在焊接移动y轴模组122的滑块上,产品焊接定位夹具123安装在焊接移动x轴模组121的滑块上,产品取放机构11将待焊接产品从随行工装14上取至产品焊接定位夹具123内,利用产品焊接定位夹具123对产品进行固定,焊接移动x轴模组121、焊接移动y轴模组122动作,改变产品焊接定位夹具123的位置,直到产品焊接定位夹具123带动产品移动至悬浮焊接组件13的位置。
31.具体的,根据附图1、附图2、附图3和附图8所示,本实施例中,产品焊接定位夹具123包括工位盒1231、产品一号夹紧气缸1233、产品二号夹紧气缸1234和限位气缸1235,工位盒1231安装在焊接移动x轴模组121的滑块上,工位盒1231内为装载待焊接产品的工位槽
1232,产品一号夹紧气缸1233、产品二号夹紧气缸1234以及限位气缸1235均安装在工位盒1231外壁用于向内侧夹紧待焊接产品;在工位盒1231上还连接有清理吹气口1236,清理吹气口1236利用管道连接氩气瓶3,利用氩气作为保护气体,以此来确保焊接效果良好,制造一个无氧环境,防止焊接时产品氧化。
32.具体的,根据附图1、附图2、附图3和附图9所示,本实施例中,悬浮焊接组件13包括背板131、产品焊接z轴模组132和自带相机焊接头133,背板131安装在下机架1顶面,产品焊接z轴模组132安装在背板131上,自带相机焊接头133安装在产品焊接z轴模组132的滑块上;在背板131上还安装有吸烟管接口钣金134,吸烟机8利用软管接至吸烟管接口钣金134,产品到位后,焊接移动x轴模组121、焊接移动y轴模组122提供产品x方向及y方向的移动,产品焊接z轴模组132控制自带相机焊接头133沿z轴方向移动,焊接过程中首先只焊四个点将产品固定,之后再进行设定轨迹焊接,待焊接完成后焊接移动平台12、产品取放机构11配合,将焊接后的产品退回到随行工装14上,接着产品随同随行工装14流向下一工序或工位,然后进行循环焊接下一个产品。
33.本实用新型的工作原理及使用流程:本实用新型的断路器激光封焊设备,待焊接的产品分别放置到治具底板141的放置位内,利用方向防错销钉143确定治具底板141的摆放方向后将治具底板141放置到产品输送线9上进行输送,产品到达顶升缓存机构15位置后,顶升气缸151动作顶起随行工装14,将随行工装14顶至取料位置,产品级数检测光电传感器153检测待焊接产品的产品级数,第二阻挡气缸155动作将后面的随行工装14阻挡,当此处留有两块及以上随行工装14时,分料气缸156动作,顶起后方的随行工装14,保证在焊接下一产品时只允许一块随行工装14流向顶升缓存机构15的位置;
34.在产品级数确认后,产品取放y轴模组113、产品取放x轴模组114动作,使产品取放气动夹爪117移动到产品上方,产品取放z轴模组116动作下降产品取放气动夹爪117,利用产品取放气动夹爪117夹住产品,之后产品取放z轴模组116缩回,产品取放y轴模组113、产品取放x轴模组114重新动作,将产品搬运至焊接移动平台12处;
35.产品取放机构11将待焊接产品从随行工装14上取至产品焊接定位夹具123内,利用产品焊接定位夹具123对产品进行固定,焊接移动x轴模组121、焊接移动y轴模组122动作,改变产品焊接定位夹具123的位置,直到产品焊接定位夹具123带动产品移动至悬浮焊接组件13的位置;
36.产品到位后,焊接移动x轴模组121、焊接移动y轴模组122提供产品x方向及y方向的移动,产品焊接z轴模组132控制自带相机焊接头133沿z轴方向移动,焊接过程中首先只焊四个点将产品固定,之后再进行设定轨迹焊接;
37.待焊接完成后焊接移动平台12、产品取放机构11配合,将焊接后的产品退回到随行工装14上,接着焊接好的产品随同随行工装14流向下一工序或工位,然后进行循环焊接下一个产品。
38.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。