1.本实用新型涉及机器人技术领域,特别是涉及一种机械臂装置。
背景技术:
2.随着中国科技水平的发展,也核工业也随之迅猛发展,其中核工业热室内部充满了放射性物质,工作人员无法进入热室内部,则需要机器人代替人工进行操作,其主要工作是完成对热室内装置的清洗、移动和退役等。
3.为了防止辐射泄漏,热室在建造时会在顶部设立特定的检维修通道,然而该通道尺寸通常较小,对机器人尺寸有较大的限制。由于环境的特殊性,用于这些场景的检维修机器人往往都是定制的。在检维修工作时,需要对检维修机器人进行安装和拆除,效率低下且复杂。
技术实现要素:
4.有鉴于此,有必要提供一种改进的机械臂装置,该机械臂装置可主动在检修通道处伸出,并进行检维修工作,且在工作结束后主动折叠回收,效率高且操作简单。
5.本实用新型提供一种机械臂装置,包括:框体;以及机械臂机构,固定安装于所述框体内,所述机械臂机构包括机械臂组件及升降组件,所述升降组件固定安装于所述框体,所述机械臂组件安装于所述升降组件,所述升降组件能够带动所述机械臂组件伸出或收回至所述框体,所述机械臂组件能够弯折或伸直,以执行操作动作。
6.如此设置,通过在机械臂装置内设置机械臂组件及升降组件,通过升降组件使得机械臂组件能够相对伸出或收回框体,同时,通过设置机械臂组件以执行操作动作。
7.进一步地,所述机械臂组件包括第一机械臂单元、第二机械臂单元及第三机械臂单元,所述第一机械臂单元、所述第二机械臂单元与所述第三机械臂单元依次转动连接,且所述第一机械臂单元安装于所述升降组件,所述第一机械臂单元、所述第二机械臂单元能够相对所述第三机械臂单元弯折或伸直。
8.如此设置,通过第一机械臂单元、第二机械臂单元及第三机械臂单元相互转动连接,以便于第二机械臂单元及第三机械臂单元相对第一机械臂单元转动。
9.进一步地,所述第二机械臂单元包括第四机臂及第一液压杆,所示第四机臂转动安装于所述第一机械臂单元端部的一侧,所述第一液压杆的一端转动安装于所述第一机械臂单元的端部的另一侧,所述第一液压杆的另一端固定安装于所述第四机臂的内壁。
10.如此设置,通过在第四机臂内设置第一液压杆,以通过驱动第一液压杆使得第四机臂能够相对第二机臂转动。
11.进一步地,所述第三机械臂单元包括第五机臂及第二液压杆,所述第五机臂转动安装于所述第四机臂端部的一侧,所述第二液压杆的一端转动安装于所述第四机臂端部的另一侧,所述第一液压杆的另一端固定安装于所述第五机臂内。
12.如此设置,通过在第五机臂内设置第二液压杆,以通过驱动第二液压杆使得第五
机臂相对所述第六机臂转动。
13.进一步地,所述机械臂组件还包括操作单元,所述操作单元固定安装于所述第三机械臂单元的端部,用于执行操作动作。
14.如此设置,通过在第三机械臂单元的端部设置操作单元,以执行操作动动作。
15.进一步地,所述操作单元包括对接底座及执行件,所述对接底座包括固定部与安装部,所述固定部固定安装于所述第二机械臂单元单元的端部,所述安装部与所述固定部转动连接,所述执行件对接与所述安装部。
16.进一步地,所述第一机械臂单元包括第一机臂、第二机臂及第三机臂,所述第三机臂套设于所述第二机臂,所述第三机臂能够相对所述第二机臂伸缩,所述第二机臂套设于所述第一机臂,所述第二机臂能够相对所述第一机臂伸缩,所述第一机臂固定安装于所述升降组件。
17.如此设置,第一机械臂单元通过设置第一机臂、第二机臂以及第三机臂,且第三机臂可伸缩的套设于所述第二机臂内,所述第二机臂可伸缩的套设于第一机臂内,以提高机械臂组件的操作范围。
18.进一步地,所述机械臂组件还包括液压单元,所述液压单元包括液压底座、液压杆及液压缸,所述液压底座设置于所述第一机臂的一端,所述液压杆固定安装于所述液压底座,所述液压缸设置于所述第二机臂相对靠近所述液压底座的一端,且所述液压底座开设有液压腔,所述液压杆容置于所述液压腔。
19.如此设置,通过设置液压单元,以驱动第二机臂相对第一机臂伸缩。
20.进一步地,所述机械臂组件还包括牵引单元,所述牵引单元包括第一牵引绳、第二牵引绳、第一滑轮以及第二滑轮,所述第一滑轮转动安装于液压缸的自由端,所述第一牵引绳的一端固定安装于所述液压底座,所述第一牵引绳穿过部分所述第二机臂和所述第三机臂内部,且部分缠绕于所述第一滑轮,且所述第一牵引绳固定安装于所述第三机臂端部,所述第二滑轮固定安装于所述第二机臂的相对靠近所述液压底座的一端,所述第二牵引绳的一端固定安装于所述第三机臂相对靠近所述液压底座的一端,并部分缠绕于所述第二滑轮,且所述第二牵引绳的另一端固定安装于所述第一机臂的内壁。
21.如此设置,通过设置牵引单元,以通过第二机臂的移动驱动第三机臂的伸缩。
22.进一步地,所述机械臂组件包括固定架,所述升降组件包括升降件、滑动件及驱动单元,所述驱动单元固定安装于所述框体,所述升降将固定件安装于所述框体,所述滑动件滑动安装于所述升降件,所述固定架固定安装于所述滑动件,所述驱动单元带动所述滑动件沿所述升降件移动。
23.如此设置,以通过驱动单元带动安装于固定架的机械臂组件沿升降件升降,从而带动机械臂组件伸出或收回所述框体。
24.本实用新型提供一种改进的机械臂装置,该机械臂装置可主动在检修通道处伸出,并进行检维修工作,且在工作结束后主动折叠回收,效率高且操作简单。
附图说明
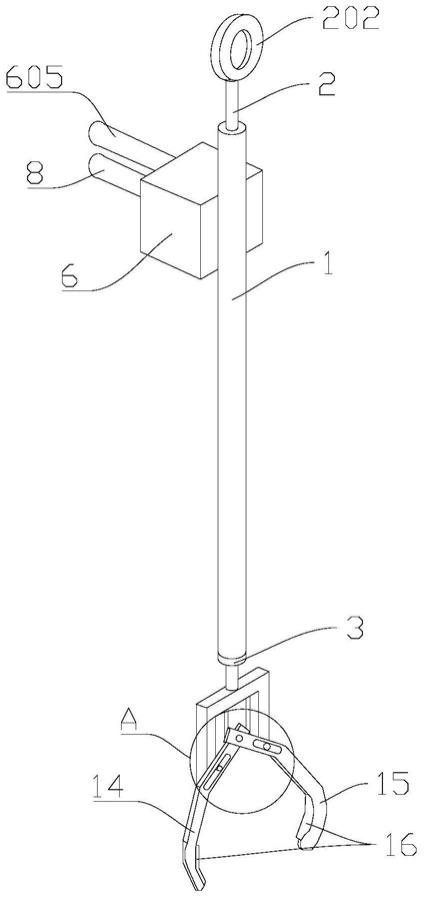
25.图1为本实用新型提供的机械臂装置的结构示意图;
26.图2为图1所示的机械臂装置在另一视角的结构示意图;
27.图3为图1所示的第一机械臂单元的结构剖视示意图;
28.图4为图1所示的机械臂组件的结构剖视示意图。
29.100、机械臂装置;10、框体;11、安装部;20、机械臂机构;21、机械臂组件;211、第一机械臂单元;2111、第一机臂;2112、第二机臂;2113、第三机臂;212、第二机械臂单元;2121、第四机臂;2122、第一液压杆;213、第三机械臂单元;2131、第五机臂;2132、第二液压杆;214、操作单元;2141、对接底座;21411、固定部;21412、对接部;2142、执行件;2143、摄像机; 215、液压单元;2151、液压底座;2152、液压柱;2153、液压缸;216、牵引单元;2161、第一牵引绳;2162、第二牵引绳;2163、第一滑轮;2164、第二滑轮;217、固定架;22、升降组件;221、升降件;222、滑动件;223、驱动单元;2231、驱动电机;2232、丝杠;2233、丝杠螺母。
具体实施方式
30.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
31.需要说明的是,当组件被称为“装设于”另一个组件,它可以直接装设在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
33.随着中国科技水平的发展,也核工业也随之迅猛发展,其中核工业热室内部充满了放射性物质,工作人员无法进入热室内部,则需要机器人代替人工进行操作,其主要工作是完成对热室内装置的清洗、移动和退役等。
34.为了防止辐射泄漏,热室在建造时会在顶部设立特定的检维修通道,然而该通道尺寸通常较小,对机器人尺寸有较大的限制。由于环境的特殊性,用于这些场景的检维修机器人往往都是定制的。在检维修工作时,需要对检维修机器人进行安装和拆除,效率低下且复杂。
35.针对上述技术问题,本实用新型提供一种改进的机械臂装置,该机械臂装置可主动在检修通道处伸出,并进行检维修工作,且在工作结束后主动折叠回收,效率高且操作简单。
36.在本实施例中,机械臂装置100包括框体10以及机械臂机构20,机械臂机构20安装于框体10内,用于固定机械臂机构20;机械臂机构20用于沿预设路径移动,以通过机械臂机构20的运动达到预设的操作目的。
37.需要说明的是,在本实施例中,机械臂装置100用于对核辐射环境下或高放废料罐的检维修工作,在其他的实施方式中,机械臂装置100还可以在其他的狭长场景中执行操作动作,例如管道、污水井,只要机械手臂能够达到预设操作动作即可。
38.在本实用新型提供的一个实施方式中,框体10用于容置机械臂机构20;具体地,框体10大致呈镂空状的长方体形,框体10的内部开设有容置机械臂机构20的容置腔,机械臂机构20弯折地设置于该容置腔内,框体10具有相背设置的第一端与第二端,且第一端与第二端均开设有允许机械臂机构20通过的长方形升降孔,机械臂机构20从第一端的升降孔伸出框体10,以进入工作区域,该长方形升降孔的两端设有安装机械臂机构20的安装部11。
39.如此设置,通过将框体10设置成镂空状,以便于在框体10内设置机械臂机构20,同时便于安装及维护机械臂机构20。
40.可以理解,本实用新型并不仅限于将框体10设置为镂空状长方体形,在其他的实施方式中,还可以将框体10设置成封闭腔室,只要预留出机械臂机构20 的容置空间以及便于机械臂伸出的升降孔即可。
41.在本实用新型提供的一个实施方式中,机械臂机构20包括机械臂组件21 及升降组件22,升降组件22固定安装于框体10的安装部11,且升降组件22 夹设机械臂组件21,用于带动机械臂组件21升降,机械臂组件21用于沿预设位置移动,执行操作动作。
42.具体地,升降组件22包括升降件221、滑动件222及驱动单元223,升降件221大致呈长条状,且升降件221沿长度方向开设有滑道,滑动件222滑动安装于滑道内,并能够沿滑道滑动,升降件221的数量设置为四个,分别设置框体10两端的安装部11,且每两升降件221的两端固定安装于框体10的一侧的安装部11;机械臂组件21设有固定架217,机械臂组件21通过固定架217 固定安装于滑动件222,以使机械臂组件21能够随滑动件222沿升降件221滑动,驱动单元223包括驱动电机2231、丝杆及丝杆螺母,其中丝杆螺母固定安装于固定架217,驱动电机2231固定安装于框体10的安装部11,且处于相对远离机械臂组件21伸出的一端,丝杠2232与所述驱动电机2231的输出轴固定连接,并随输出轴转动,且丝杠2232穿设丝杠螺母2233至框体10另一端的安装部11,以使在丝杠2232在转动过程中能够随带动丝杠螺母2233升降,从而带动机械臂组件21沿升降件221升降。
43.如此设置,通过在框体10内设置升降组件22,使得机械臂组件21能够伸处和收回框体10,便于机械臂机构20的容置于搬运,提高了工作效率。
44.可以理解,本实用新型并不限制升降组件22的设置形式,在其他的实施方式中,还可以设置为气动升降装置或液压升降装置,只要能够带动机械臂组件 21升降即可。
45.同时,为了能够扩大机械臂组件21的操作范围,机械臂组件21包括第一机械臂单元211、第二机械臂单元212以及第三机械臂单元213,第一机械臂单元211、第二机械臂单元212以及第三机械臂单元213依次连接,用于执行操作动作。
46.具体地,第一机械臂单元211的一端转动连接于第二机械臂单元212的一端,第三机械臂单元213转动连接于第二机械臂单元212的另一端,第二机械臂单元212能够相对第一机械臂单元211转动,且第三机械臂单元213能够相对第二机械臂单元212转动,以使得机械臂组件21能够执行操作动作;第一机械臂单元211固定安装于升降组件22,升降组件22带动第一机械臂单元211升降;第一机械臂单元211包括第一机臂2111、第二机臂2112以及第三机臂2113,其中,第一机臂2111、第二机臂2112及第三机臂2113均设为一端为封闭端,另一端设置为开口端的中空套筒,第二机臂2112的封闭端通过第一机臂2111 的开口端伸入第一机臂2111内,且第二机臂2112可在第一机臂2111内相对第一机臂2111伸缩,第三机臂2113的封闭端通过第二机臂2112的开口端伸入第二机臂2112内,且第三机臂2113可在第二
机臂2112内相对第二机臂2112伸缩。
47.如此设置,通过将第一机臂2111、第二机臂2112及第三机臂2113设置为中空筒状,使得第一机臂2111、第二机臂2112及第三机臂2113能够相对收缩,便于第一机械臂单元211的收缩同时能够扩大机械臂组件21的活动范围。
48.为了能够使得第一机械单元主动的伸缩,即使得第二机臂2112及第三机臂 2113能够主动地伸出第一机臂2111或主动的回收至第一机臂2111内,在本实用新型提供的一个实施例中,机械臂组件21还包括液压单元215及牵引单元 216,液压单元215与牵引单元216设置于第一机械臂单元211内,液压缸2153 单元用于带动第二机臂2112的伸缩,牵引单元216用于带动第三机臂2113的伸缩。
49.具体地,液压单元215包括液压底座2151、液压柱2152及液压缸2153,液压缸2153设置于第二机臂2112的封闭端,液压缸2153大致呈圆柱状,自第二机臂2112的封闭端朝向第三机臂2113的开口端延伸,且液压柱2152穿过第三机臂2113的封闭端,液压缸2153的内部开设液压腔,液压底座2151固定安装于第一机臂2111的封闭端内壁,并通过管道与外部液压装置连接,液压柱2152 固定安装于液压底座2151,并套设于液压缸2153的液压腔内;通过外部液压装置的启闭,使得固定安装于第二机臂2112的液压缸2153能够液压柱2152的延伸方向伸缩,以使线第二机臂2112能够相对第一机臂2111伸缩的一级伸缩。
50.如此设置,通过将相互配合的液压柱2152及液压缸2153分别设置于第一机臂2111及第二机臂2112,以实现第二机臂2112能够相对第一机臂2111伸缩,从而扩大第一机械臂单元211的活动范围。
51.可以理解,本实用新型并不仅限于将液压柱2152设置于第一机臂2111,液压缸2153设置于第二机臂2112,从而通过液压柱2152及液压缸2153的相互配合使得第二机臂2112能够相对第一机臂2111伸缩,在其他的实施方式中,还可以通过在第一机臂2111上设置液压缸2153,在第二机臂2112上设置液压柱 2152,只要使得第一机臂2111与第二机臂2112能够相对伸缩即可。同时,需要说明的是,除了通过液压传动的方式使得第二机臂2112能够相对第一机臂 2111伸缩,还可以通过分别在第一机臂2111与第二机臂2112上设置齿轮及齿条,通过齿轮齿条的配合,实现第二机臂2112相对第一机臂2111的伸缩;除此之外,还可以使用丝杠2232及丝杆螺母的相互配合等,只要能够使得第二机臂2112能够相对第一机臂2111伸缩即可。
52.同时,在本实施例中,为了能够使得第三机臂2113能够相对第二机臂2112 伸缩,机械臂组件21还设有牵引单元216,牵引单元216包括第一牵引绳2161、第二牵引绳2162、第一滑轮2163以及第二滑轮2164,第一滑轮2163转动安装于液压缸2153的自由端,第一牵引绳2161的一端固定安装于第一机臂2111的液压底座2151,第一牵引绳2161穿过第二机臂2112的封闭端和第三机臂2113 的封闭端,并且第一牵引绳2161部分缠绕于第二安装件后固定安装于第三机臂 2113的封闭端,在液压组件的推动下,使得安装有第三机臂2113的第二机臂 2112相对远离液压底座2151,从而拉升第一牵引绳2161,使得第三机臂2113 在第一牵引绳2161的拉伸下及第一滑轮2163的作用下伸出第二机臂2112;第二滑轮2164固定安装于第二机臂2112的封闭端外周边,第二牵引绳2162的一端固定安装于第三机臂2113封闭端的外侧,并穿过第二滑轮2164后固定安装于第一机臂2111的内壁,且第二牵引绳2162部分缠绕于第二滑轮2164;在液压单元215的作用下,第二机臂2112先谷底靠近液压底座
2151,第二滑轮2164 随第二机臂2112逐渐靠近液压底座2151,以拉伸第二牵引绳2162,以使第三机臂2113逐渐收缩至第二机臂2112内,从而实现第三机臂2113的收缩。
53.如此设置,通过在第一机械臂组件21内设置牵引单元216,以通过牵引单元216与液压单元215的相互配合,以使得第三机臂2113能够自第二机臂2112 内伸出,且同时能够收回至第二机臂2112。
54.可以理解,本实用新型并不限制通过牵引单元216中的牵引绳的方式带动第三机臂2113相对第二机臂2112伸缩,在其他的实施方式中,牵引单元216 还可以通过丝杠螺母2233或齿轮传动的方式带动第三机臂2113相对第二机臂2112伸缩。
55.此外,第一机臂2111及第二机臂2112的开口端设有导向轮,导向轮的数量设置为多个,多个导向轮沿第一机臂2111及第二机臂2112的端部外周间隔布设,第二机械臂在沿第一机械臂伸缩的过程中,以及第三机械臂在沿第二机械臂伸缩的过程中,导向轮以能够对第二机臂2112及第三机臂2113进行伸缩导向及周向限位,防止第二机臂2112及第三机臂2113在伸缩过程中发生卡接或弯折的现象。
56.在本实施例中,第二机械臂单元212转动安装于第一机械臂单元211,用于使得第二机械臂单元212能够相对第一机械臂单元211转动,以扩大机械臂机构20的活动范围。
57.具体地,第二机械臂单元212包括第四机臂2121及第一液压杆2122,第四机臂2121的一端转动连接于第三机臂2113的开口端的一侧,使得第四机臂2121 能够相对第三机臂2113转动,且第四机臂2121设置中空筒状,其内部开设有容置空间,第一液压杆2122容置第四机臂2121的容置空间内,第一液压杆2122 的一端转动安装于第三机臂2113的开口端,并处于第四机臂2121与第三机臂2113的铰接处的相对侧,第一液压杆2122的另一端转动安装于第四机臂2121 相对远离第三机臂2113的一端的内壁,通过件第一液压杆2122的伸缩,使得第四机臂2121能够相对第三机臂2113转动,即当第一液压杆2122伸长时,第四机臂2121逐渐与第三机臂2113保持处于同一轴线,当第一液压杆2122收缩时,第四机臂2121逐渐相对第三机臂2113弯折。
58.如此设置,通过设置第四机臂2121及第一液压杆2122,使得第四机臂2121 能够主动的相对第三机臂2113转动,以调节机械臂组件21的活动范围。
59.可以理解,本实用新型并不限制第四机臂2121与第三机臂2113相对转动的结构,在其他的实施方式中,还可以设置相互啮合的齿轮,通过齿轮主动地转动使得第四机臂2121能够相对第三机臂2113转动,即只要能够使得第四机臂2121能够相对第三机臂2113转动即可。
60.同时,在本实施例中,第三机械臂单元213转动安装于第二机械臂单元212 的另一端,用于使得第三机械臂单元213能够相对第二机械臂单元212转动,以扩大机械臂机构20的活动范围。
61.具体地,第三机械臂单元213包括第五机臂2131以及第二液压杆2132,第五机臂2131的一端转动连接于第四机臂2121的另一端,使得第午机臂能够相对第四机臂2121转动,且第五机臂2131设置中空筒状,其内部开设有容置空间,第二液压杆2132容置第五机臂2131的容置空间内,第二液压杆2132的一端转动安装于第四机臂2121的另一端,并处于第五机臂2131与第四机臂2121 的铰接处的相对侧,第二液压杆2132的另一端转动安装于第五机臂2131的内壁,通过件第二液压杆2132的伸缩,使得第五机臂2131能够相对第四机臂
2121 转动,即当第二液压杆2132伸长时,第五机臂2131逐渐与第四机臂2121保持处于同一轴线,当第二液压杆2132收缩时,第五机臂2131逐渐相对第四机臂 2121弯折。
62.如此设置,通过设置第五机臂2131及第二液压杆2132,使得第五机臂2131 能够主动的相对第四机臂2121转动,以调节机械臂组件21的活动范围。
63.需要说明的,在本实施中,为了使得件机械臂机构20能够执行操作动作,机械臂组件21还包括操作单元214,操作单元214固定安装于第五机械臂的另一端,用于执行操作动作。
64.具体地,操作单元214包括对接底座2141、执行件2142以及摄像机2143,其中,摄像机2143固定安装于第五机臂2131的外周,用于拍摄操作动作过程;对接底座2141包括固定部21411与对接部21412,固定部21411固定安装于第五机臂2131的另一端,对接部21412转动安装于固定部21411,固定部21411 与安装组能够相对转动,调节对接部21412的位置;执行件2142固定安装于对接部21412,对接部21412设置有快接接口,执行件2142可通过快接接口安装至对接部21412,在本实施例中,执行件2142设置为液压夹手,在其他的实施方式中,执行件2142可通过预设的执行动作选择不同的器件,例如螺纹销拆解抓手等。
65.如此设置,通过设置操作单元214,以使得操作单元214执行预设操作动作。
66.可以理解,本实用新型并不限制操作单元214的形式,只要能够执行预设的操作动作即可。
67.此外,摄像机在进行操作动作之前会对工作环境进行扫描,并将数据导入计算机进行环境建模。通过对工作环境数字孪生3d再现,可以使操作者在控制端通过电脑模型或虚拟现实技术了解到环境中的障碍物的位置,并进行有效规避。
68.以上所述实施方式的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施方式中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
69.本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本实用新型,而并非用作为对本实用新型的限定,只要在本实用新型的实质精神范围内,对以上实施方式所作的适当改变和变化都落在本实用新型要求保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。