1.本实用新型涉及一种取矿设备,涉及取矿设备技术领域,具体涉及一种用于倾斜矿体开车的取矿设备。
背景技术:
2.我国矿山井矿石开采,尤其是有色金属矿山有许多倾斜矿体需要开采,一般倾斜矿体的倾斜角度在25
°
至30
°
左右,像这种斜坡的矿体开采难度非常大。现有的开采方式是爆破后用人工或爬斗铰车进行取矿,出矿效率低下,时常会有滚石冒顶事故发生,伴随着就是人身伤亡事故。这种情况在全国各个矿山企业都有不同程度地存在,这也是影响矿山企业效益和安全生产的一个突出问题。针对现有技术存在以下问题:
3.1、现有的取矿设备在使用时,工作臂架在运行时容易使臂架产生颤抖,导致在取矿时容易使矿石从中掉落下来的问题;
4.2、现有的取矿设备在使用过程中,安装有远程操控系统的机构在倾斜的山坡上移动时,会受到抖动而造成操控机构损坏的问题。
技术实现要素:
5.本实用新型提供一种用于倾斜矿体开车的取矿设备,其中一种目的是为了具备稳定连接机构、支撑连接杆、活动轴,解决现有的取矿设备在使用时,工作臂架在运行时容易使臂架产生颤抖,导致在取矿时容易使矿石从中掉落下来的问题;其中另一种目的是为了解决现有的取矿设备在使用过程中,安装有远程操控系统的机构在倾斜的山坡上移动时,会受到抖动而造成操控机构损坏的问题,以达到使取矿设备在倾斜的山坡上移动时,可以通过连接稳定机构、倾斜稳定架对安装有远程操控系统的机构进行保护,防止在倾斜上坡颠簸造成操控机构的损坏。
6.为解决上述技术问题,本实用新型所采用的技术方案是:
7.一种用于倾斜矿体开车的取矿设备,包括取矿设备主体、辅助设备主体、连接主轴、工作臂架、取矿框架,所述取矿设备主体的右侧固定安装有辅助设备主体,且所述取矿设备主体的表面一侧活动安装有连接主轴,所述连接主轴的内侧活动安装有工作臂架,所述工作臂架的一端活动安装有取矿框架,所述连接主轴的底部设置有稳定连接机构,所述稳定连接机构用于使工作臂架在使用时能够更加稳定。
8.所述取矿设备主体的右侧设置有远程操控稳定主体,所述远程操控稳定主体用于对远程操控系统的机构进行保护。
9.本实用新型技术方案的进一步改进在于:所述取矿设备主体的底部活动安装有移动连接机构,所述移动连接机构的底部固定安装有方向转动机构,所述方向转动机构的左右两侧活动安装有移动机构。
10.采用上述技术方案,该方案中的移动连接机构、方向转动机构与移动机构结合可以使设备整体在倾斜的山体进行方向转变与移动。
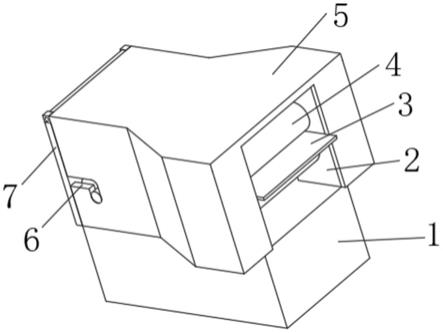
11.本实用新型技术方案的进一步改进在于:所述远程操控稳定主体的底部固定安装在辅助设备主体的顶部,且所述远程操控稳定主体的内部设置有远程操控器,所述远程操控器的底部固定安装有控制支撑杆,所述控制支撑杆的底部固定安装在远程操控稳定主体的内壁底端,所述远程操控器的左右两侧固定安装有连接稳定机构,所述连接稳定机构的外侧固定安装在远程操控稳定主体的内壁左右两侧,且所述连接稳定机构的表面四周固定安装有倾斜稳定架,所述倾斜稳定架的外侧固定安装在远程操控稳定主体的内壁左右两侧。
12.采用上述技术方案,该方案中的远程操控稳定主体内部的连接稳定机构与倾斜稳定架结合对远程操控器进行支撑稳定。
13.本实用新型技术方案的进一步改进在于:所述远程操控稳定主体的内部设置有防干扰层,所述防干扰层的表面四周固定安装在远程操控稳定主体的内部,且所述远程操控稳定主体的内部且位于防干扰层的内侧设置有防电磁层,所述防电磁层的表面四周固定安装在防干扰层的内侧,且所述防电磁层的内侧固定安装在远程操控稳定主体的内部。
14.采用上述技术方案,该方案中的远程操控稳定主体内部的防电磁层与防干扰层可以对山区的电磁波干扰进行隔绝,避免电磁波对远程操控稳定主体内部的远程操控器造成影响。
15.本实用新型技术方案的进一步改进在于:所述连接稳定机构的内部左右两侧设置有抖动传导块,所述抖动传导块的外侧固定安装在连接稳定机构的内壁上,且所述抖动传导块的内部固定安装有抖动消除器。
16.采用上述技术方案,该方案中的连接稳定机构内部的抖动传导块可以将震动进行传导给抖动消除器,抖动消除器可以对抖动进行抵消。
17.本实用新型技术方案的进一步改进在于:所述稳定连接机构的一端活动安装在工作臂架的底部,且所述稳定连接机构的表面一侧设置有支撑连接杆,所述支撑连接杆的底部活动安装在稳定连接机构的表面一侧,所述工作臂架的底部且位于稳定连接机构的右侧活动安装有活动轴,所述支撑连接杆的顶部固定安装在活动轴的一侧。
18.采用上述技术方案,该方案中的稳定连接机构、支撑连接杆与活动轴对工作臂架进行连接,使工作臂架在使用过程中可以减少震动。
19.由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
20.1、本实用新型提供一种用于倾斜矿体开车的取矿设备,为了具备稳定连接机构、支撑连接杆、活动轴,解决现有的取矿设备在使用时,工作臂架在运行时容易使臂架产生颤抖,导致在取矿时容易使矿石从中掉落下来的问题,通过以上结构结合以达到使取矿设备在使用时,通过稳定连接机构、支撑连接杆、活动轴对臂架进行连接稳定,防止臂架在工作时发生颤抖。
21.2、本实用新型提供一种用于倾斜矿体开车的取矿设备,为了具备远程操控稳定主体、连接稳定机构、倾斜稳定架、抖动传导块、抖动消除器,解决现有的取矿设备在使用过程中,安装有远程操控系统的机构在倾斜的山坡上移动时,会受到抖动而造成操控机构损坏的问题,通过以上结构结合以达到使取矿设备在倾斜的山坡上移动时,可以通过连接稳定机构、倾斜稳定架对安装有远程操控系统的机构进行保护,防止在倾斜上坡颠簸造成操控机构的损坏。
附图说明
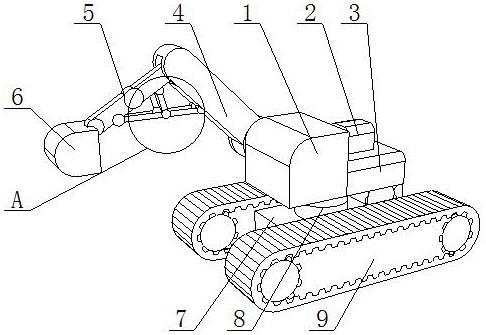
22.图1为本实用新型的立体结构示意图;
23.图2为本实用新型的远程操控稳定主体剖视结构示意图;
24.图3为本实用新型的连接稳定机构剖视结构示意图;
25.图4为本实用新型的部分放大结构示意图。
26.图中:1、取矿设备主体;2、远程操控稳定主体;3、辅助设备主体;4、连接主轴;5、工作臂架;6、取矿框架;7、移动连接机构;8、方向转动机构;9、移动机构;10、控制支撑杆;11、远程操控器;12、防电磁层;13、防干扰层;14、连接稳定机构;15、倾斜稳定架;16、抖动传导块;17、抖动消除器;18、稳定连接机构;19、支撑连接杆;20、活动轴。
具体实施方式
27.下面结合实施例对本实用新型做进一步详细说明:
28.实施例1
29.如图1-4所示,本实用新型提供了一种用于倾斜矿体开车的取矿设备,包括取矿设备主体1、辅助设备主体3、连接主轴4、工作臂架5、取矿框架6,取矿设备主体1的右侧固定安装有辅助设备主体3,且取矿设备主体1的表面一侧活动安装有连接主轴4,连接主轴4的内侧活动安装有工作臂架5,工作臂架5的一端活动安装有取矿框架6,连接主轴4的底部设置有稳定连接机构18,稳定连接机构18用于使工作臂架5在使用时能够更加稳定,取矿设备主体1的右侧设置有远程操控稳定主体2,远程操控稳定主体2用于对远程操控系统的机构进行保护,取矿设备主体1的底部活动安装有移动连接机构7,移动连接机构7的底部固定安装有方向转动机构8,方向转动机构8的左右两侧活动安装有移动机构9,移动连接机构7、方向转动机构8与移动机构9结合可以使设备整体在倾斜的山体进行方向转变与移动,远程操控稳定主体2的底部固定安装在辅助设备主体3的顶部,且远程操控稳定主体2的内部设置有远程操控器11,远程操控器11的底部固定安装有控制支撑杆10,控制支撑杆10的底部固定安装在远程操控稳定主体2的内壁底端,远程操控器11的左右两侧固定安装有连接稳定机构14,连接稳定机构14的外侧固定安装在远程操控稳定主体2的内壁左右两侧,且连接稳定机构14的表面四周固定安装有倾斜稳定架15,远程操控稳定主体2内部的连接稳定机构14与倾斜稳定架15结合对远程操控器11进行支撑稳定,倾斜稳定架15的外侧固定安装在远程操控稳定主体2的内壁左右两侧。
30.实施例2
31.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:远程操控稳定主体2的内部设置有防干扰层13,防干扰层13的表面四周固定安装在远程操控稳定主体2的内部,且远程操控稳定主体2的内部且位于防干扰层13的内侧设置有防电磁层12,防电磁层12的表面四周固定安装在防干扰层13的内侧,远程操控稳定主体2内部的防电磁层12与防干扰层13可以对山区的电磁波干扰进行隔绝,避免电磁波对远程操控稳定主体2内部的远程操控器11造成影响,且防电磁层12的内侧固定安装在远程操控稳定主体2的内部,连接稳定机构14的内部左右两侧设置有抖动传导块16,抖动传导块16的外侧固定安装在连接稳定机构14的内壁上,且抖动传导块16的内部固定安装有抖动消除器17,连接稳定机构14内部的抖动传导块16可以将震动进行传导给抖动消除器17,抖动消除器17可以对抖动进行抵
消,稳定连接机构18的一端活动安装在工作臂架5的底部,且稳定连接机构18的表面一侧设置有支撑连接杆19,支撑连接杆19的底部活动安装在稳定连接机构18的表面一侧,工作臂架5的底部且位于稳定连接机构18的右侧活动安装有活动轴20,稳定连接机构18、支撑连接杆19与活动轴20对工作臂架5进行连接,使工作臂架5在使用过程中可以减少震动,支撑连接杆19的顶部固定安装在活动轴20的一侧。
32.下面具体说一下该用于倾斜矿体开车的取矿设备的工作原理。
33.如图1-4所示,在使用时,取矿设备主体1通过移动连接机构7、方向转动机构8与移动机构9在倾斜的山体进行方向转变与移动,然后通过远程操控稳定主体2内部的连接稳定机构14与倾斜稳定架15结合对远程操控器11进行支撑稳定,通过稳定连接机构18、支撑连接杆19与活动轴20对工作臂架5进行连接,使工作臂架5在使用过程中可以减少震动。
34.上文一般性的对本实用新型做了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本实用新型思想精神的修改或改进,均在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。